深水半潜式钻井平台动力定位实时功率模拟研究
2012-01-08杨欢,王磊,申辉
杨 欢,王 磊,申 辉
(上海交通大学海洋工程国家重点实验室,上海 200240)
深水半潜式钻井平台动力定位实时功率模拟研究
杨 欢,王 磊,申 辉
(上海交通大学海洋工程国家重点实验室,上海 200240)
以某深水半潜式钻井平台为例,建立平台和推力系统模型,对风、浪、流环境载荷作用下的动力定位系统进行时域模拟,得到平台的运动时历和功率消耗,对平台动力定位的实时功率进行研究。为了验证数值计算的准确性,开展相关模型试验研究。旨在借助时域模拟来分析平台动力定位实时功率,通过模型试验来验证数值计算,检验了动力定位时域模拟的可靠性和优越性,为以后工程实际应用提供了重要的理论依据。
动力定位;时域模拟;实时功率;海洋平台
随着陆地资源的不断匮乏,人类对于能源的需求日益增长,开发深海资源成为未来的大势所趋。因此海洋工业在世界范围内不断兴起,掀起了海洋石油、天然气、深海渔业、矿业以及海洋新能源的研究热潮。动力定位系统可为深海资源的开发(如石油钻探、开采等)提供保障,已逐步成为深海工业主要技术之一[1]。
动力定位是使海上浮动结构物利用其自身动力抵御海上风、浪、流的影响,自动保持于设定位置和方位上的一项技术。动力定位系统是一种闭环的控制系统,其原理是利用某种感应元件将在外界扰动力作用下浮体的水平漂移量与方位偏差及时感应和检测出来,再根据外界扰动力的影响计算出所需的力和力矩,并对安装于船舶或平台上的各推力器进行推力分配计算,发出指令使各推力器产生相应推力,从而使船舶或平台不断纠正偏移状态,定位于所要求的精度范围内[2]。
动力定位系统的定位精度和功率消耗是实际工程应用中两大重要问题。国内外不少学者在研究动力定位问题时对系统功率消耗进行过研究,例如动力定位系统功率消耗随水深变化的规律研究以及定位精度随功率消耗的变化研究等。鉴于动力定位系统实时功率模拟的困难性,对风浪流载荷作用下的半潜平台动力定位系统进行时域模拟,以得到其实时功率模拟情况,并开展模型试验来验证时域模拟,检验了动力定位系统数值计算的可靠性和优越性,为以后工程实际应用提供重要的理论依据。
1 理论介绍
1.1 平台运动方程

式中:u,v,w 为线位移速度;p,q,r为角位移速度;m 为平台质量,包括流体附加质量;Ixx,Iyy,Izz,Izx为质量惯性矩,包括附加质量部分;X,Y,Z分别为x,y和z方向的外力;K,M和N分别为x,y和z方向的外力矩。
在计算螺旋桨推力Ti时,首先由模型试验或理论方法计算得到推力器的敞水性能,根据轴向进速查取推力器敞水性能参数,便可计算得到推力、转矩及消耗功率:


图1 半潜平台动力定位时域模拟原理示意Fig.1 Model of motion simulation for DP semi-submersible platform
1.2 时域模拟原理
动力定位的时域模拟又称为动态模拟,就是对在动力定位控制下的半潜平台的真实运动进行实时模拟,对运动状态做时域模拟能顾及到更多的因素和限制条件,从而能更接近实际情况,同时获得许多有价值的信息,如动力定位精度、功率消耗等。深水半潜平台动力定位运动模拟的流程如图1所示。主要模块包括风浪流环境力的计算模型、控制系统模型、推力系统模型以及平台运动方程[4]。
2 环境载荷计算
2.1 风载荷计算
风载荷一般采用模块法进行计算。风力及风力矩的一般表达式[5-6]:
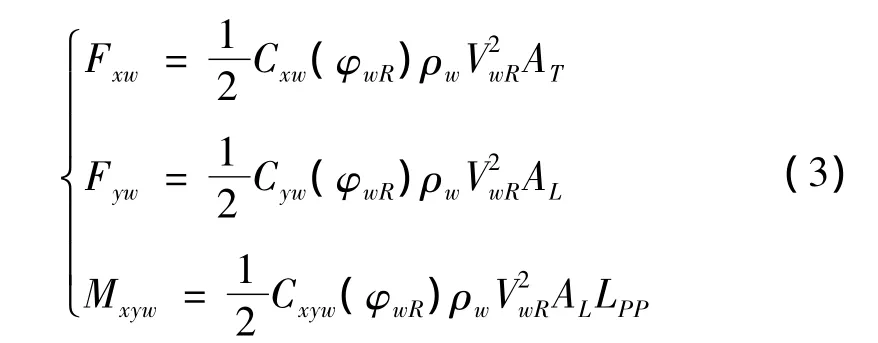
式中:Fxw,Fyw,Mxyw分别为纵向风力、横向风力、首摇风力矩;ρw为空气密度;Cxw(φwR),Cyw(φwR)和 Cxyw(φwR)分别为纵向风力系数、横向风力系数、首摇风力矩系数;AT为首向受风面积;AL为侧向受风面积;Lpp为两柱间长;VwR为海平面以上10 m处相对风速。
2.2 流载荷计算
流载荷可沿OX轴和OY轴方向分解为纵向流力Fxc和横向流力Fyc。考虑到船的漂移运动,在此采用船与流体的相对速度[7-8],则有:

式中:ρc为海水密度;Fxc,Fyc和 Mxyc分别为纵向流力、横向流力、艏摇流力矩;Cxc(φcR),Cyc(φcR)和 Cxyc(φcR)分别为纵向流力系数、横向流力系数和艏摇流力矩系数;d为船平均吃水。
2.3 波浪力计算
波浪漂移力是二阶差频波浪力的低频部分,因此在本质上是一种非线性力,表现为以低频率缓慢变化的力,在数值上较一阶波浪力小得多,但会导致海上平台的大幅水平运动,特别在某些谐摇的情况。
邱 实(通信作者) 男 1986年生,中科院西安光学精密机械研究所助理研究员,博士,研究方向:图像处理、信号与信息处理,模式识别,微波技术.
由二阶传递函数,应用Fourier变换,可以得到二次脉冲响应函数 g(τ1,τ2)[9-10]:

给定波浪时历ζ(t),则可得到二阶波浪力的时历:

3 动力定位实时功率模拟算例
3.1 半潜平台主尺度
以某一深水半潜式钻井平台为例,建立平台和推力系统模型。平台主要构件包括:下浮体2个、柱形连接构件2个、立柱4根、主甲板、箱型甲板、居住舱楼、井架台、井架、起重机和直升机台等。平台的主要参数如表1所示。
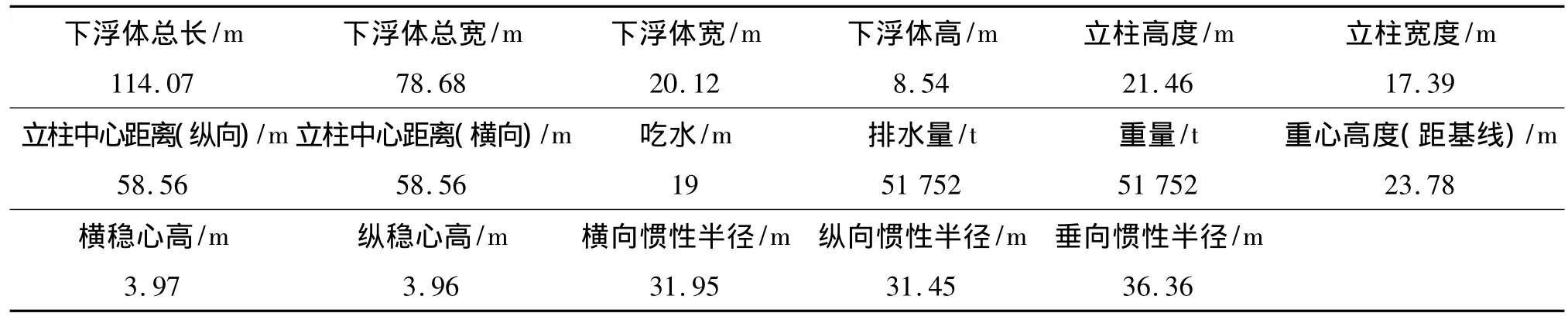
表1 半潜平台主要参数Tab.1 Main parameters of semi-submersible platform
本次计算中采用8个全方位推力器来控制平台的定位,四个安装在下浮体的外侧,四个在内侧,且相互于纵横中心线对称。螺旋桨的直径为3.6 m,最大功率为4 600 kW,内侧螺旋桨距离中心线的距离为43.36 m和23.79 m,外侧螺旋桨距离横纵中心线距离分别为43.76 m和34.77 m。具体安装位置如图2所示。
3.2 动力定位时域模拟
该平台主要工作海域为我国南海,同时兼顾世界范围内其他主要海域(东南亚、西非)的工作特点,因此作业工况环境条件为风速23.15 m/s,流速0.93 m/s,采用 JONSWAP谱,有义波高为6.0 m,谱峰周期为11.21 s。此海况为平台在南海海域的工作海况,属于6级海况。风、浪、流同向为最恶劣的海况,因此取风、浪、流同向联合作用,平台的艏向角选取90°,且假定所有推力器完好。计算中设计水深为3 000 m。
利用Marin开发的软件DPSEMI,对平台动力定位进行时域模拟,计算时间取600 s,每0.5 s进行数据采集和记录,得到平台水平运动的时历。表2统计了平台时域模拟的平均位移、艏向和功率。
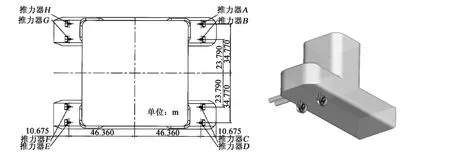
图2 推力器安装位置示意Fig.2 Layout of thrusters

表2 半潜平台时域模拟结果Tab.2 Results of time domain simulation

图3 平台各运动参数历时曲线Fig.3 Time series of platform
3.3 动力定位模型试验
试验在上海交通大学海洋工程国家重点实验室的海洋工程水池进行,水池的主要尺度为50 m×30 m×6 m(长×宽×深),可以模拟风、浪、流各种海洋环境条件并能根据试验要求改变水深。根据海洋工程水池的实际情况及模型试验的要求,选择缩尺比λ=50。试验中,对半潜平台的平台主体、上层建筑、吊机等结构进行了模拟。动力定位系统的推力装置和控制系统为上海交大海洋工程国家重点实验室自主设计的全回转推进装置和控制软件——上海交通大学动力定位系统。水深的模拟由调节海洋工程水池的可升降假底来实现,平台的工作水深为3 000 m,本次实验的主要目的是测量其动力定位能力,水深对系统的影响不大,因此用80 cm水深来模拟。试验中模拟的海洋环境条件如表3所示。

表3 平台作业状态环境条件Tab.3 Environmental condition in operation case
用于本试验的测试仪器是非接触式光学六自由度运动测量与分析系统,测量平台在风浪流作用下的三个自由度运动,即:纵荡,横荡,及首摇。包括:控制箱、计算机一台、Z-推全回转推力器8套、浪高仪、六分力仪、照相机、摄像机。上述测试仪器在正式试验以前都经过仔细的校验和标定,以确保试验中测量数据的正确可靠。
动力定位模型试验数据转换成实型,试验结果见表4。图4将平台的推力系统总功率时历曲线与时域模拟进行对比。

表4 计算与试验工况结果的对比Tab.4 Comparison of results between calculation and model test
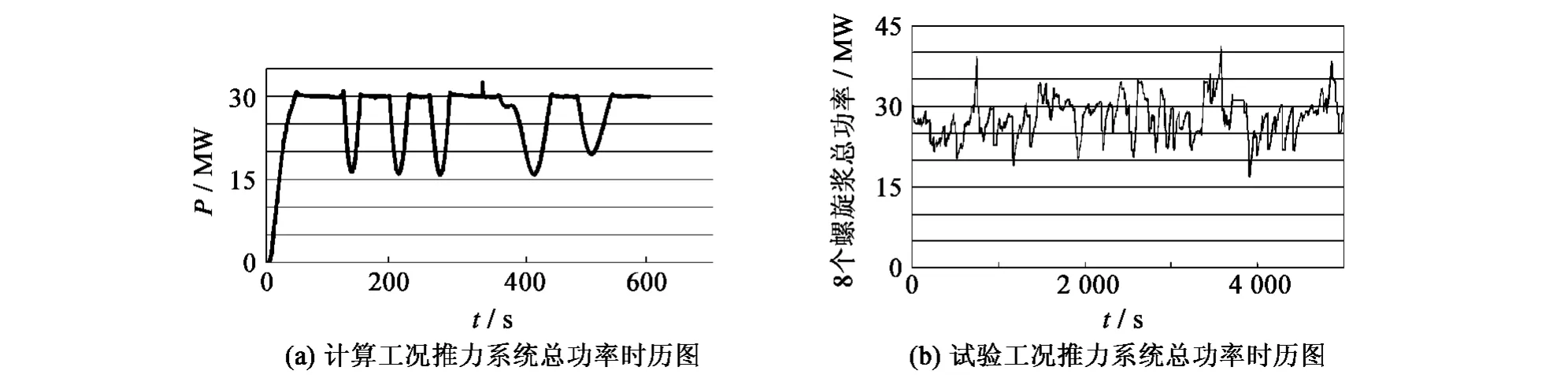
图4 两种工况条件下推力系统总功率时历对比Tab.4 Time series of total power in model test condition and calculation condition
3.4 结果分析
平台的动力定位,需要从定位精度和功率消耗两个角度进行分析。本文根据试验工况对比分析平台动力定位的实时功率,得到以下结论:
1)如图3所示,平台的漂移半径和螺旋桨总功率的时历曲线能够很清晰地反映出平台在整个动力定位中的漂移情况和与此对应时刻的功率消耗。由于平台在90°浪向角度时,对海流和波浪具有最大的接触横截面积,所以运动幅值较大,给动力定位带来一定困难。通过对比可以看出,平台漂移和螺旋桨功率曲线均呈现小幅度的波动,并且波动规律具有较好的一致性,波峰和波谷相互交替出现,实验规律吻合。从图中可知,动力定位螺旋桨的最大功率是在最大位移和最大艏向角的出现后出现的,这表明,动力定位系统是实时作用系统,并且在本系统中由于需要先计算出平台位移量才进行推力分配,所以,推力器作用最大功率出现时间相对位置偏移时间会滞后一些,这也反映了动力定位系统的后反馈效应。
2)如图4所示,计算工况的动力定位时域模拟推力系统总功率的时历曲线的记录时间为600 s,而试验工况的记录时间为5 000 s。从图中对比可以看出,模型试验结果和理论计算在趋势上吻合较好。螺旋桨的总功率均在27 000 kW附近波动,但是幅值不大。在5 000 s的试验工况中,定位能力时域模拟图像大致呈现循环波动。
3)表3对比了计算工况和试验工况平台的平均位移、艏向和功率,两者吻合较好。计算结果表明,平台的最大漂移半径为10.87 m,最大艏向角为-0.81°,根据以往经验,平台的漂移半径远远小于水深的2%,说明平台动力定位效果良好。推力系统平均功率为26 640.82 kW,与试验工况相比,误差百分比为3.55%,因此功率消耗比较理想。
总之,计算值与试验值吻合较好,说明该数值计算方法可行。同时,由于试验螺旋桨安装过程中齿轮传动之间可能有些间隙,导致螺旋桨使用率的偏差,再加上试验过程中测量装置有些误差,导致测量数据的偏差。但是总的趋势还是比较好的反应了上述数值计算的结果。在以后的模型试验中,将要确保螺旋桨使用率和测量装置精度,来减小试验误差。
4 结语
以深水半潜式钻井平台为研究对象,建立平台和推力系统模型,对平台的动力定位系统进行时域模拟,得到平台的运动时历和功率消耗,对平台动力定位的实时功率进行研究,并开展了相关的模型试验研究。计算值与试验值吻合较好,说明数值计算方法的可行性。该方法可以很好地对平台推力系统的功率消耗做实时模拟。因此今后需要更加重视动力定位数值计算,更好地开发其时域模拟方法,为以后工程实际应用提供了重要的理论依据。
[1]Wang Lei,Yang Huan,Zhang Shen.Research on critical depth of water for a deep sea semi-submersible drilling platform based on dynamic positioning[C]∥ISOPE.2010.
[2]王 磊,孙 攀,王 亮.深水半潜平台动力定位时域模拟研究[J].中国科学,2011(2):123-131.
[3]赵志高,杨建民,王 磊,等.动力定位系统发展状况及研究方法[J].海洋工程,2002,20(1):91-97.
[4]李勇跃,王 磊,孙 攀.深水半潜式钻井平台动力定位最优作业方向研究[J].海洋工程,2011,29(1):26-31.
[5]Sahin I,Aybar A.A survey of research on wind loads on semisubersibles[C]∥IEEE Oceans.1984:548-555.
[6]Ir F van Walree.Wind and Current Loads on Semi-subersibles[R].MARIN:No.49817-5-SE,1991.
[7]Wichers J E W.A Simulation Model for a Single Point Moored Tanker[M].Publ.797.MARIN,Wageningen,the Netherlands,1988.
[8]O M Faltinsen.Sea Loads on Ships and Offshore Structures[M].Cambridge University,1990.
[9]J A Pinkster.Low Frequency Second Order Wave Exciting Forces on Floating Structures[M].MARIN Publication,No.650,1980.
[10]刘应中,廖国平.船舶在波浪上运动理论[M].上海:上海交通大学出版社,1987.
Research on real-time power simulation of dynamic positioning based on a deep sea semi-submersible drilling platform
YANG Huan,WANG Lei,SHEN Hui
(State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China)
This paper takes a deep sea semi-submersible drilling platform as an example,makes time domain simulation for dynamic positioning system,achieves time series of the displacement and consumed power of the platform and conducts researches on real-time power simulation.To verify numerical simulation,dynamic positioning model test is conducted.The computed results agree well with test data,which indicates this method is available.This paper is aimed to study real-time simulation of dynamic positioning,verify results of calculation by model test,summarize the reliability and superiority of time domain simulation and provide important theoretical bases for engineering application in the future.
dynamic positioning;time domain simulation;real-time power;offshore platform
P751
A
1005-9865(2012)02-0014-06
2011-11-03
工业信息化部高技术船舶科研资助项目
杨 欢(1986-),女,河北人,硕士生,主要从事动力定位研究。E-mail:handsomejay@163.com
王 磊。E-mail:wanglei@sjtu.edu.cn