少齿差行星电动减速机的优化设计
2012-01-05薄一龙
薄一龙
少齿差行星电动减速机的优化设计
薄一龙
阐述了少齿差行星电动减速机的技术原理,介绍了该机的一些性能特点及在机械传动设备中的应用。
少齿差行星减速机;电驱动;机电一体化
在现代化工业中,为了实现各种生产工艺过程的要求,需要采用各种各样的生产机械。这些生产机械大多采用电动机拖动。多数生产机械的任务是将电能转换为机械能,以机械运动的形式来完成各种工艺要求。
随着工艺技术的不断发展,各种生产机械根据工艺特点,对生产机械和拖动的电动机也不断提出各种不同的要求。有的要求电动机能迅速启动、制动和反转;有的要求多台电动机之间的转速按一定的比例协调运动;有的要求电动机达到极慢的稳速运动;有的要求电动机启动、制动平稳,并能准确地停止在给定的位置。为实现上述控制过程,达到各种不同的目的,在实际应用中,可采用直流电动机的良好调速性能实现速度控制;用永磁磁阻直流电动机实现转速按一定比例协调运动的控制;用开关磁阻电机实现迅速启动、制动和反转运行的控制。但在驱动大多数机械时,一般都需将电动机的速度通过减速机降下来,并提高输出转矩来驱动设备的运行。
随着科学的不断发展,“机械电子学”的应用已经开始。它已跳出了传统的设计方法。在此提出了一个机电一体化的“少齿差行星电动减速机”优化设计方案。
1 少齿差行星电动减速机的工作原理

少齿差行星电动减速机是在少齿差行星减速机的基础上设计的一种由电磁直接驱动的减速机装置(见图1)。图中固定的内齿轮a与行星齿轮b组成第一级少齿差行星减速,与输出轴相连的内齿轮d与行星齿轮c(行星齿轮c与行星齿轮b同轴连接)组成第二级少齿差行星减速。从传动结构图中可看出,前一级和后一级少齿差行星减速的连接并不是通常的串联关系,传动比不等于前级传动比乘以后级传动比。

2 Z型少齿差行星减速机高速由H端输入,使行星轮b与固定的内齿轮a啮合旋转。因齿轮b与齿轮c同轴,行星齿轮b的公转和自转同时传给行星齿轮c,行星齿轮c的自转和公转方向相反。如果行星齿轮c公转1周,输出内齿轮d也按行星轮c公转方向旋转1周。又由于行星齿轮c的自转方向与公转方向相反,在不同配齿情况下,可得到以下3种结果:
⑴c齿轮自转使内齿轮d旋转1圈的同时公转1圈,输出的齿轮d将无转速输出,输出为“0”;
⑵c齿轮自转使内齿轮d旋转1圈、c齿轮公转小于1圈时,输出轴的方向为“-”,转速等于c齿轮公转和自转同时作用在d轮上的转速之差;
⑶与⑵相同,当c齿轮公转大于1圈时,输出轴的方向为“+”,转速等于d轮上转速之差。
2Z型少齿差行星减速机的传动比可以在很大范围内选取。少齿差行星电动减速机就是利用了这个机械特性,并将固定的内齿轮a由电磁输入的定子代替,行星齿轮b由永磁转子代替,定、转子组成电磁功率输入级,而行星轮c、输出内齿轮组成输出级,动力由输出轴M端输出。电磁功率由输入级高速输入端输入,输出将得到大转矩低转速的输出。
电磁功率输入级,在该例中是在内齿轮两侧对称输入的,输出是由各行星齿轮对称驱动内齿轮形成的。
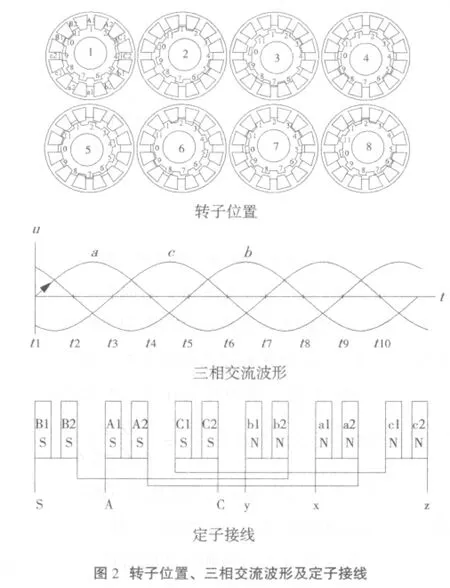
少齿差行星电动减速机的电磁功率输入级,工作原理见图2中转子位置及三相交流波形。在t1时刻,由于A相电压为零,B相与C相电压极性相反(C(一)、B(+)) 幅值相等,根据图2定子接线,在B1B2、C1C2表面产生同等磁力。因转子磁极表面均为N,B1B2、C1C2对转子磁极产生均等吸力。在t7时刻对应的转子位置为7,位置1与位置7对比可看出,在位置1时转子磁极1对应A1,2对应A2;而位置7,转子磁极2对应A1,3对应A2。对于A相,在一个正弦周期,转子转动了30°,当经历12个正弦周期后,转子旋转1周。上述是在理想条件下的运行情况,如果转子带载运行,设负载转矩小于电磁转矩,这时转子位置将会滞后定子磁场一个角度,负载转矩越大偏转角度也就越大,在圆周上偏转角度如果大于180°时,转子将同步。在空载时偏转角度小,磁转矩小,随着偏转角度的增大,磁力矩也就增大。用位置1作为例子,在转子1、2与A1、A2对齐时刻,如偏转角度在90°时,转子3、4、5、6、7磁极与定子磁极产生吸力,而转子8、9、10、11、1磁极与定子磁极产生推力,这将在转子上产生最大的力矩。在实际应用中,偏转角度随转子上负载的变化而变化,达到转子转速的稳定,提高了带负载的能力。
少齿差行星电动减速机的电磁功率输入级将电磁能转换为机械能,从转子输出轴上连接的行星齿轮与输出内齿轮啮合,最后从内齿轮输出。
在本例中,定子磁极Za=12,转子磁极Zb=11,输出级行星齿轮Zc=44,内齿轮Zd=50,

当少齿差行星电动减速机采用50 Hz三相交流电供电时,12个周期转子旋转1圈,转子转速n=250 r/min,再通过ix4=25的传动比减速,输出轴转速为n/25=10 r/min。改变行星齿轮与输出内齿转的齿数可改变电动减速机的输出转速。
少齿差行星电动减速机的输出转矩:由于旋转磁场在定子圆周上旋转12周时转子旋转1周,电动减速机的总传动比i=12×25=300。

又根据定子内径为182 mm的Y180M-2型三相异步电动机额定功率为30 kW,而本例中的定子内径为288 mm,我们设定本例中电动减速机的功率为30 kW,输出转矩为 T额=95.49×300=28 647 Nm,这里没考虑损耗。
2 少齿差行星电动减速机的特点
⑴传动比取值范围宽。2Z少齿差行星电动减速机传动比取值i=10~150,在本例中只要改变行星齿轮和内齿轮的配齿即可改变传动比。
⑶体积小。目前在大多数生产机械电动拖动中,基本是电动机、减速机组合安装,占地面积大,级联多,损耗大。而少齿差行星电动减速机,第一级由电磁装置取代,完全保留了少齿差行星减速机机械传动结构的性能。它是真正的机电一体化产品。
⑷电驱动简单。少齿差行星电动减速机可直接采用三相交流电源驱动,无需电子控制装置,在需要调速时,可直接使用变频器调速。
⑸调速范围大,尤其在低速范围内更具有良好的调速性能。
⑹负载适应能力强,当负载载荷变动时,自动调整电磁驱动角,保持转速平稳。
⑺具有相同的启、制动转矩,特别适合在电梯曳引驱动中使用。
⑻频繁的正、反转驱动。
3 少齿差行星电动减速机的市场前景
少齿差行星电动减速机是一个机电的一体化产品,更是一项新的传动技术。特别是应用在电梯曳引驱动系统中,可降低设备投入成本,减小机房尺寸,提高曳引系统的工作效率和调速性能,因此市场前景极为广阔。
Optimization Design of Electric Planet-gear Speed Reducer with Fewer Tooth Difference
Bo Yilong
The article describes the technology of electric planet reducer with fewer tooth difference,introduces the performance features and the applications in the mechanical transmission equipment.
planet-gear speed reducer with fewer tooth difference;electric drive;mechatronics
TH132.425
A
1000-4866(2012)02-0003-03
薄一龙,男,2011年毕业于陕西科技大学(机械制造及其自动化专业),现在大同煤矿集团公司同忻矿工作。
2012-03-21
2012-04-17