变速恒频风力发电机组最大能量捕获策略研究
2012-01-04艾青
艾 青
(湖北民族学院 信息工程学院, 湖北 恩施 44500)
随着煤炭、石油等能源的逐渐减少和环境压力的加大,可持续能源战略提倡以新能源逐步取代化石燃料能源,风能作为一种开发成本较低、清洁环境、安全可再生的能源形式,目前越来越受到广泛关注.风力发电机组并网发电时,必须保证输出电能的频率与电网频率一致.从速度控制角度可将风力机分为以下两种:一种是采用恒速恒频技术,即不管风速如何变化,始终保持发电机转速不变,以输出恒定频率的电能;另一种是采用变速恒频技术,指发电机转速随风速变化而改变,然后通过电力电子控制技术得到恒定频率的电能.变速恒频技术与恒速恒频技术相比,最大的优势在于发电系统与电网频率之间实现了解耦控制,这就使得变速恒频风电机组的风轮和发电机转速可以在很大范围内变化,从而最大限度的捕获风能.本文研究变速恒频风力机最大能量捕获策略.
风力发电机组是复杂、多变量、非线性不确定系统,控制技术是机组安全高效运行的关键.对于变速恒频风电机组而言,在额定风速以下运行时,风电机组应该尽可能的提高能量转换效率,进行最大功率点跟踪.在额定风速之上运行时,为了控制风力机输出功率不超过额定值,变桨控制可以有效地调节风电机组所吸收的风能,使之限定在安全设计值以内[1-4].
1 变速恒频风力机特性
风力发电机是将捕获的空气动能转换成电能的装置.风能发电一般要经过两个基本转换步骤:首先在风能流的驱动作用下,风力机风轮转动,获得机械功率;之后转动的风轮经过传动链变速后驱动旋转电机产生电能.根据贝兹理论,风力机的最大风能利用效率Cp一般不超过空气动能的59.3%[5].对风轮叶片长度为R的风力机的捕获功率可以表示为:
(1)
式中:R为风轮半径;ρ表示空气密度;v表示风速;λ为叶尖速比;β为桨叶节距角;Cp(λ,β)为风能利用系数,反映了风轮机利用风能效率,是λ和桨叶节距角β的函数.
风力机的叶尖速比λ表示风力机叶片速度与风速之比的一个变量,它表征了风能转换成机械能的效率.
(2)
式中:Ωl表示风轮低速轴角速度.叶尖速比λ在风力机的控制中是一个非常重要的参数.针对每一个确定的桨叶节距角β都存在一个最佳叶尖速度比,记为λ0pt,使得风能利用效率最大,记为Cpmax.将式(2)代入式(1)可以得到额定功率以下的最优功率与转速的关系为:
(3)
风力机的特性曲线如图1、2所示.图1表示在一定风速下风能利用效率Cp与叶尖速比λ的对应关系;图2表示,在不同风速v下,对应不同的最佳转速使风机的输出功率最大[6-7].
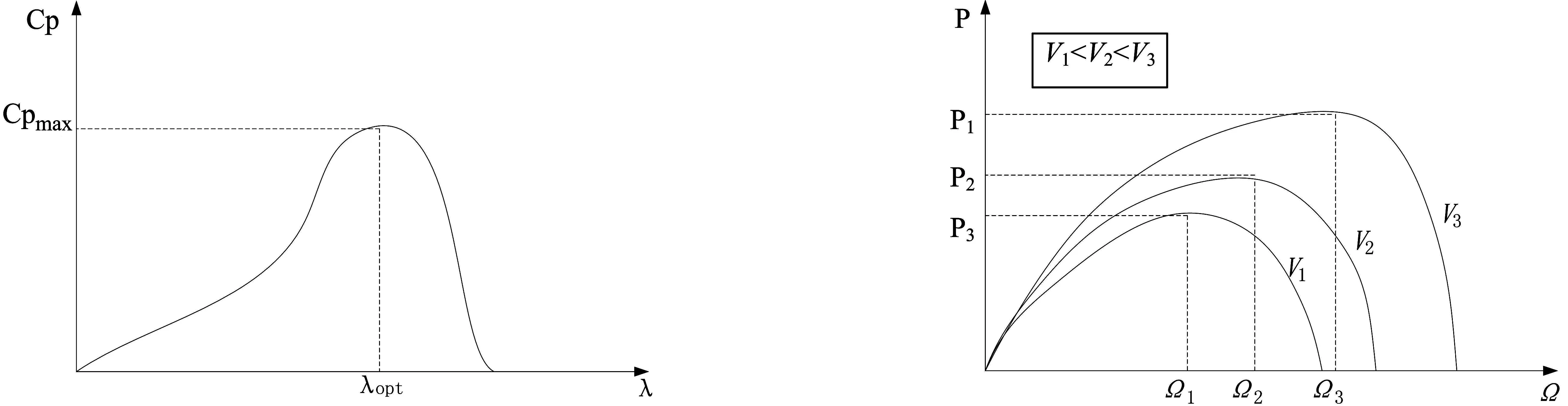
图1 在某一风速下的Cp-λ关系曲线 图2 不同风速和转速下功率曲线
2 风电机组最大能量捕获策略
根据风速的不同,风电系统一般由四个过程构成:启动、变速运行、变桨距运行、刹车.当风速达到最低切入风速时风力机能够正常启动,而刹车过程是当风速超出切除风速时要确保风机安全停机,这两个动态过程的主要控制目标是使系统能在最短时间内有较快响应速度.当风力机处于切入风速与额定风速之间时,即在风力机额定功率以下时采用变速运行方式,变速控制的主要控制目标是调节风能、减少或消除风能产生过程中的急剧波动,捕获最大能量、减弱暂态负荷的影响.当风速超过额定风速并小于切除风速时采用变桨距控制,主要控制目标是通过调节桨距角来降低功率利用系数Cp,从而维持风机输出不超过额定功率.
基于尽可能地最大捕获风能,分别对风力机风速v、叶尖速比λ、桨距角β三者关系做出分析,使得功率系数维持在最优值附近变化,从而获得最大风能.当风速低于额定风速时,风力机处于部分负荷运行区域.考虑到初始桨距为风力机的优化桨距,可将其看作一个参考桨距,定义桨距角β=0.当风速超过额定风速时,风力机运行于满负荷区域,可以通过控制桨距角来调节风速在叶片上的攻角以降低风能动力功率[8-9],把输出功率限定在额定值以内.基于功率变化特性作为判断依据的风力发电系统能量捕获控制结构如图3所示.从结构图可以看出,基于功率的变化情况的控制器有两种控制策略:变桨控制和变速控制.
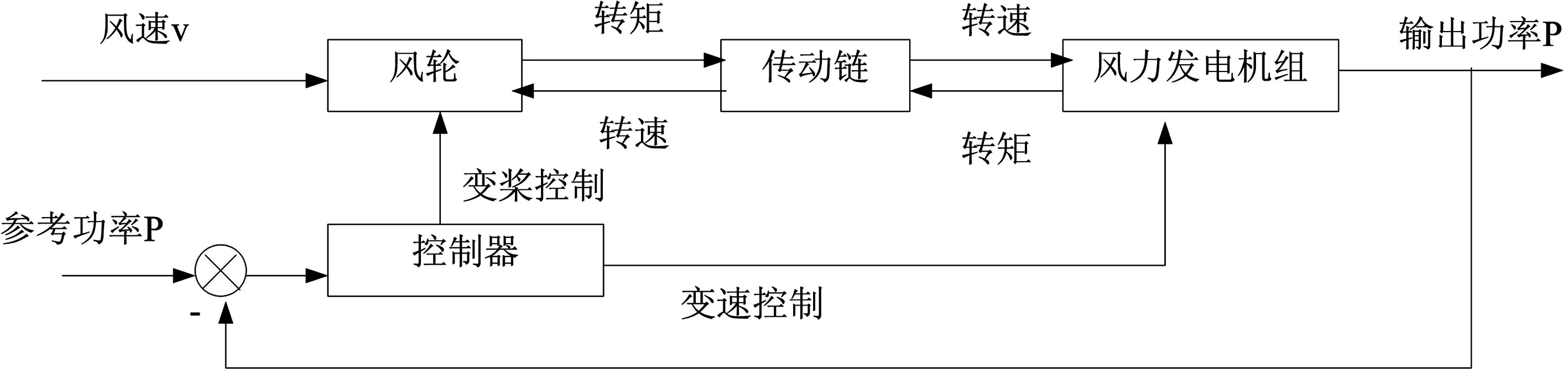
图3 变速恒频风力发电机组控制结构图

图4 模糊控制系统结构图
2.1 额定风速以下的控制策略
由于在额定风速下,根据桨距角的初始值不同有两种工况:当桨距角β=0时,风电机组主控系统一般不需要改变桨距角,机组仅仅进行变速控制以追求最大风能利用系数;当桨距角β>0时,风电机组首先要控制桨距角使β=0,同时进行变速控制进行最大功率点跟踪.
最大功率点跟踪是从风力机静态功率特性和系统中获取的少量信息,使风力机在最大功率点附近运行.本策略控制的基础是在风力机的性能参数(额定功率、额定转速等)已知条件下,通过测量动态系统中的高速轴转速Ωh和风力机输出功率Po两个参数,通过计算dp/dΩh的值,可以判断该值与功率曲线上静态运行最高点(最大值为0)的对应关系,进行采取相应的控制.
在风速变化比较平缓的运行条件下,风力机实时工作点与最优工作点偏移量不大;而在湍流风速作用下,实时运行工作点与最优工作的偏移量非常大.考虑到风力机不可能理想的运行在最优工作点,而只能快速的跟踪,并且要保证风力机输出功率的平稳特性,线性化的控制算法不是很适应风力机的非线性变化.模糊逻辑控制在稳态运行时,可以比较好的控制工作点在最优工作点附近微小的移动,且动态响应效果也会有所改善.
2.2 额定风速以上的控制策略
风力机空气动力特性的关键变量是动态风在风轮叶片上的攻角,它反映了风力机获得风能的大小,一般随风速增加并且随转速和桨距角的增加而减小.在高风速时,为了减小空气动力功率,保证风力机输出功率不越限,可以采用变桨距控制方法.变桨距控制包括主动变桨控制和被动变桨控制.主动变桨控制,即叶片前缘向来风转动,产生顺桨效应,相当于增加桨距角.被动变桨控制方法是使用自操作装置使叶片变桨,通过失速效应限制输出功率.
对于大型变速恒频风力机,一般采用主动变桨控制.考虑到风轮的大惯性特性,为限制输出功率漂移,变桨距系统的动作响应要求迅速,功率控制环应该有较大的增益,主要的输入信号为功率和风速的变化.
由于风力发电机组的多输入多输出变量间的强耦合性、系统参数的时变性、系统结构的严重非线性与不确定性.即使做出多种假设,要进行传统的定量分析也是十分困难.而智能控制算法可充分利用其非线性、变结构、自寻优等各种功能来克服系统的参数时变与非线性因素.因此对于风力发电系统,模糊控制系统自然是一种较为理想的控制系统[10-12].
3 模糊控制系统设计
模糊控制系统是一种自动控制系统,它以模糊数学、模糊语言形式的知识表示和模糊逻辑的规则推理为理论基础,其组成核心是具有智能性的模糊控制器.本文根据功率变化信息构建双模糊控制器结构,结合上述控制策略,在风力机组全有效风速范围内进行最大能量捕获研究,系统控制结构如图4所示.
在风力机组控制系统中,控制问题为调节转速进行最大功率点跟踪或调节桨距角限制功率越限.考虑到动态过程的快速性和平稳性,采用二维模糊控制器,即模糊控制器的输入变量有两个,控制误差和误差变化率,而控制器的实际输出仍只有一个.模糊控制器的输入量为功率误差Ep和误差变化率ECp,输出量为变桨角度Δβ或风轮转速ΔΩ(取标幺值).模糊控制器一般流程如下:首先是输入变量的模糊化,然后根据工程经验写出控制规则,最后通过解模糊得到控制输出变量.
根据本文所研究的输入输出值的范围,为其确定合适的量化系数和比例系数,使得模糊控制器输入和输出变量的论域分别落在模糊论域{-3,-2,-1,0,1,2,3}和{-3,-2,-1,0,1,2,3}上.定义模糊子集均为:{负大NB,负中NM,负小NS,零ZO,正小PS,正中PM,正大PB}.根据功率调节的需要,采用类似人类的直觉思考的状态评估模糊控制规则,其模糊控制规则举例如下:ifEpis PB andECpis PB then and ΔΩ is NB.在额定风速以下运行时,隶属函数采用动态特性较好的三角函数;在额定风速以上运行时,为保证额定风速以上输出功率的平稳性,隶属函数采用平滑的高斯型隶属函数.
4 仿真研究
4.1 仿真参数
本文研究的风力发电机组主要参数如下:风轮叶片长度45 m,额定功率为2 MW,额定风速为10.5 m/s,切出风速为25 m/s,空气密度为1.25 kg/m3,风能功率系数的最优参数λopt=7,Cpmax=0.47,风力机最大转矩为1.7×106N·M.
4.2 仿真结果分析
根据模糊控制系统结构图建立仿真模型,本文的仿真研究以额定风速以下为例说明,额定风速以上的模糊控制系统可类比仿真.风速模型如图5所示,平均风速为5 m/s,动态跟踪的叶尖速比λ如图6所示,风能利用效率系数Cp如图7所示,输出功率P如图8所示.

图5 风速模型变化曲线 图6 叶尖速比变化曲线

图7 风能效率系数变化曲线 图8 输出功率变化曲线
从仿真结果可以看出,当t=18 s左右时,风速突然下降以后,叶尖速比同时刻有较大增加,从而偏离最大功率跟踪点.此时的风能效率利用系数下降很快,从较高的0.46左右下降到0.14,输出功率变化趋势和作用风速曲线相似.根据文中提出的基于功率变化信息判断的模糊变速控制,使叶尖速比在最佳值λ=7上下波动,在额定风速下捕获最大能量.
5 小结
风力发电研究的最终目标是尽可能地获得最大风能,但是由于整个风机系统具有严重的非线性特征,传统的控制方法不是很适合.本章首先探讨了风力发电系统最大风能追踪的机理,制定了全有效风速下捕获最大风能的控制目标.随后功率变化信息设计了2个模糊控制器,从而实现风电机组最大能量的捕获.仿真结果显示模糊控制方法的使用能够实现最大能量捕获,可以弥补由于系统非线性造成的控制不确定性,使整个系统的鲁棒性好.
[1] 李鹏,宋永端,刘卫,等.风力发电机组控制技术综述及展望[J].电气自动化,2010,32(5):1-4.
[2] 殷明慧,蒯狄正,李群,等.风机最大功率点跟踪的失效现象[J].中国电机工程学报,2011,31(18):40-46.
[3] 叶杭冶.大型并网风力发电机组控制算法研究[D].杭州:浙江大学,2008.
[4] 孔屹刚.大型风力机功率控制与最大能量捕获策略研究[D].上海:上海交通大学,2009.
[5] 张雷,李海东,李建林,等.基于LQR方法的风电机组变桨距控制的动态建模与仿真分析[J].太阳能学报,2008,29(7):781-785.
[6] 任丽娜,刘福才.额定风速以上永磁同步风力发电系统的自适应控制[J].仪器仪表学报,2011,32(6):1324-1329.
[7] 张广明,嵇保健.变速风力发电机组出功控制策略研究[J].控制工程,2011,18(4):592-599.
[8] 张治俊,李辉,陈宏文.双馈风电机组总体控制策略及运行性能[J].重庆大学学报,2011,33(7):63-68.
[9] 黄锦成,杨苹.一种小型风电机组的优化最大功率点跟踪控制算法[J].电机与控制应用,2011,38(2):44-48.
[10] 王斌,吴焱,丁宏.变速变桨距风电机组的高风速变桨距控制[J].电力自动化设备,2010,30(8):81-83.
[11] 耿华,杨耕.变速变桨距风电系统的功率水平控制[J].中国电机工程学报,2008,28(25):130-137.
[12] 姚兴佳,张雅楠,郭庆鼎,等.带自调整函数的模糊控制器在风力发电机组中的应用[J].太阳能学报,2011,32(1):132-137.
