锅炉汽包水位模糊控制特性与仿真
2011-12-28平静水刘恒马新
平静水,刘恒,马新
(淮南师范学院数学与计算科学系,安徽淮南 232038)
锅炉汽包水位模糊控制特性与仿真
平静水,刘恒,马新
(淮南师范学院数学与计算科学系,安徽淮南 232038)
研究了锅炉汽包水位模糊控制特性:设定点改变;参数改变;跟踪特性;控制周期的改变。通过这四种情况仿真曲线的分析,得出Mamdani型模糊控制器的优点与不足之处。
Mamdani;模糊控制;控制特性;仿真
英国伦敦大学教授E.M.Mamdani于1974年在实验室研制成功锅炉和蒸气机模糊控制系统,以此作为模糊控制发展的第一个里程碑。实际上,美国加利福尼亚大学教授L.A.Zadeh,在1972和1973年发表的两篇论文中已系统地提出了模糊控制原理。模糊控制的实质就是运用计算机程序实现生产操作人员的控制经验。模糊控制成功的原因主要在于:模糊控制系统采用的是人类语言型的控制规则,可以解决比较复杂的系统控制问题,非常适用于一些数学模型难以建立,动态特性很难把握的被控对象。控制规则间进行的模糊连接,又使得控制器在即使是相互矛盾的控制规则中也能找到折中的方案,控制效果比起常规控制算法要好的多。
1 锅炉汽包水位模糊控制系统设计
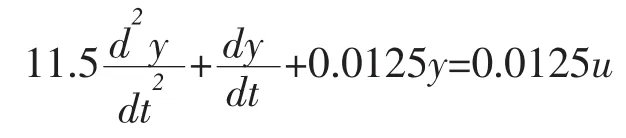
该控锅炉汽包水位是大型工厂动力装置中影响锅炉正常操作的一个关键的系统参数,它直接关系到整个生产装置能否安全稳定运行。如果汽包水位过高,高温高压高速的水粒流可打坏汽轮机转子。如果水位控制太低,会影响锅炉的汽水循环,引起爆管[2-6]。为使锅炉安全、有效地运行,需要保持稳定的汽包水位。用传递函数来描述汽包水位控制系统时,可用公式表示为:

在上式中,H为汽包水位;K为给水流量作用下的放大系数;T为时间常数。
由于微分方程与传递函数可以相互转化,所以当上式的系数发生变化时,对应的传递函数的系数也发生相应的改变。
锅炉气包水位控制系统是由汽包、水位变送器、控制器和给水调节阀组成。锅炉气包水位控制系统是由汽包、水位变送器、控制器和给水调节阀组成。该控制器我们选取实际水位与期望水位的差及其变化率EC作为模糊控制器的输入变量,以控制给水阀门开度的控制量U为输出变量[3]。
根据实际控制经验,我们选取水位误差E的实际物理量论域X为[-25mm,+25mm],期望水位为25mm,选取EC的实际物理量Y为[-6,+6],选取控制量U的实际物理量论域U为[-25,+25]。将误差大小量化为八个等级,将误差变化率和控制量量化为七个等级,得到:
E的模糊集为:{NB,NM,NS,NO,PO,PS,PM,PB};EC和U的模糊集为:{NB,NM,NS,O,PS,PM,PB};选取E和EC的论域均为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
选取U的论域为:{-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7};
上述的误差模糊集选取八个元素,区分了NO和PO主要是为了提高精度。根据手动控制策略,可得到反映锅炉汽包水位控制系统的控制规则表如表1所示:
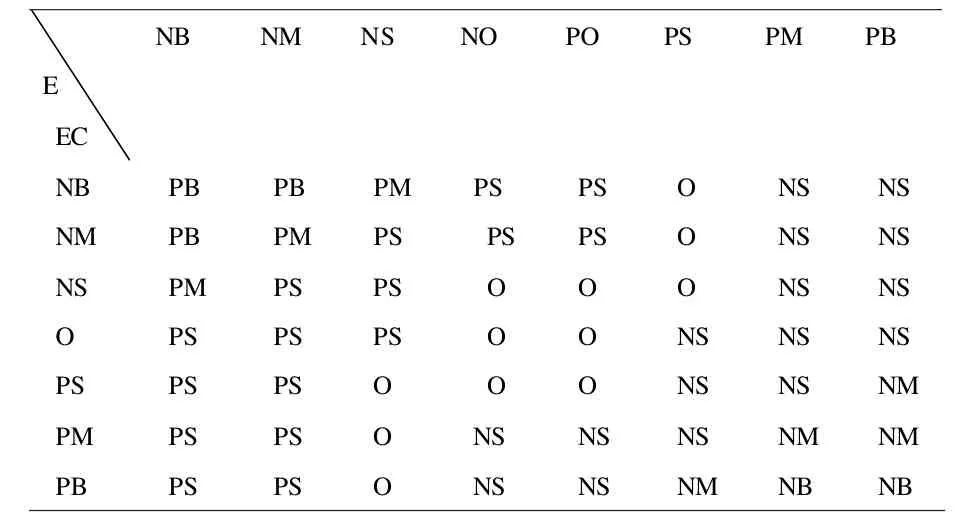
表1 模糊规则控制表
由模糊推理系统编辑器可以看出该模糊控制器的类型为Mamdani型,根据分析我们选择E和EC为输入,控制量名为U,与(And)方法为min,或(Or)方法为max,蕴涵(Implication)方法为min,合成(Aggregation)方法为max,去模糊化(defuzzification)方法为面积中心法(centroid)。根据经验,我们选择E、EC和U的隶属函数全为三角形(trimf)。
由输入输出的物理量论域和划分的档次可得偏差E的量化因子KE=625=0.24,偏差变化率EC的量化因子KEC=66=1,控制量U的量化因子KU=257=3.57。在水位为正常状态时,突加25mm的阶跃信号对锅炉汽包水位控制系统做定值扰动仿真。取步长为1s,从采样到模糊控制器输出的时间忽略不计。在MATLAB的M窗口输入仿真程序可得到如下位置输出仿真曲线(横坐标为时间,纵坐标为水位):
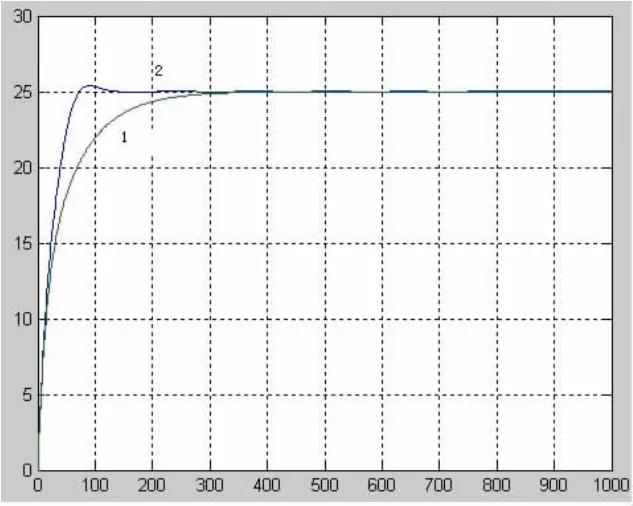
图1 锅炉水位模糊系统的响应曲线图
上图曲线2为模糊控制系统在阶跃信号作用下的响应,曲线1为直接在阶跃信号作用下的响应。
y(∞)上下两条虚线为我们所要求的稳态精度,ts为过渡时间(大约为110s)。在MATLAB里计算得ymax=25.3742,超调量为:

超调很小,而且从图中可以看出在时刻曲线达到最大,然后当时,曲线达到稳态精度,超调很小,并最终稳定在25mm,振荡很小。所以该模糊系统的设计既满足稳定性﹑稳态精度的要求也满足动态指标要求的控制任务。而且模糊控制相对于直接给以阶跃函数的响应具有较小的超调量和较短的调整时间,从而模糊控制具有很好的控制特性。
2 Mamdani型模糊控制器的控制特性之仿真研究
上述模糊控制器的设计是对于期望值是25mm的位置点设计的,通过仿真可以看出Mamdani型的模糊控制器在这种情况下具有很好的控制特性。但是在实际当中,一个模糊控制器设计完成以后我们希望它能够随着环境或参数的改变也能够适应实际。所以针对人们实用化了的Mamdani型模糊控制器有必要讨论一下当它的条件改变以后它的控制特性如何变化。
2.1 设定点改变
针对上面锅炉汽包水位问题把它的设定点改变成别的值而不是25mm而其它的参数都不变的情况下该模糊控制器是不是还能具有这用良好的控制特性呢?下图为改变设定点的情况下该模糊控制器的位置输出仿真曲线(步长为1s):
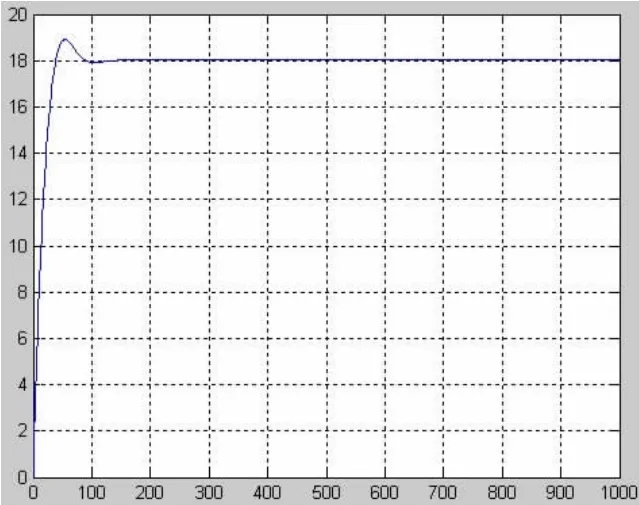
图2 设定点为15mm的情况下系统的位置输出仿真曲线
设定点改为15mm,其它的参数不变,系统最终仍然能够稳定,过渡时间为100多秒,系统超调比较小,但稳定值并不是我们期望的设定点。
原因:设定点为25mm时系统最终稳定在25mm,其控制动作设为,当其它条件不变,设定点改为15mm,此时15相对于25始终有一个偏差,所以这个时候控制动作相对于原来最终也有一个差值,所以最终不能稳定在我们期望的值15。
结论:Mamdani型的模糊控制器对设定点改变时针对本系统虽然能够稳定,
但不能稳定在期望值,即此时控制器对设定点的改变没有适应能力。
2.2 参数的改变
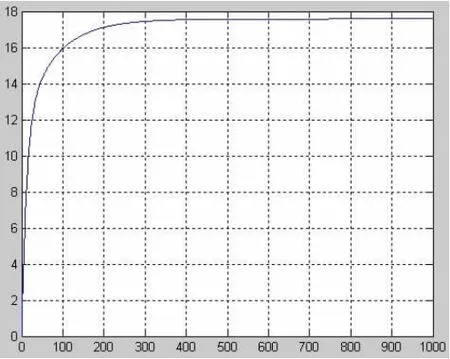
图3 设定点为25mm情况下系统的位置输出仿真曲线
结论:图3和图1比较,说明当u改为u2时系统过渡时间变长,而且稳定点也相应改变,即Mamdani型模糊控制器对于模型结构(如u的阶数的改变)基本没有适应能力。
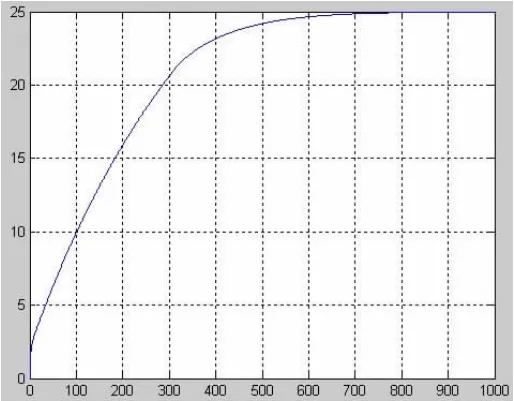
图4 设定点为25mm情况下系统的位置输出曲线
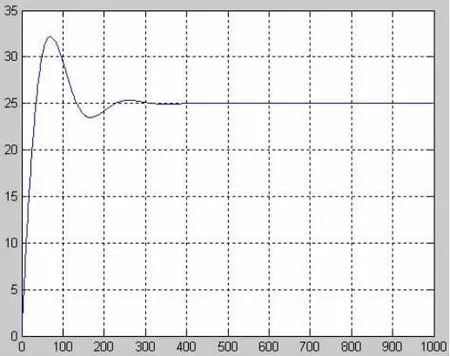
图5 设定点为25mm情况下系统的位置输出仿真曲线
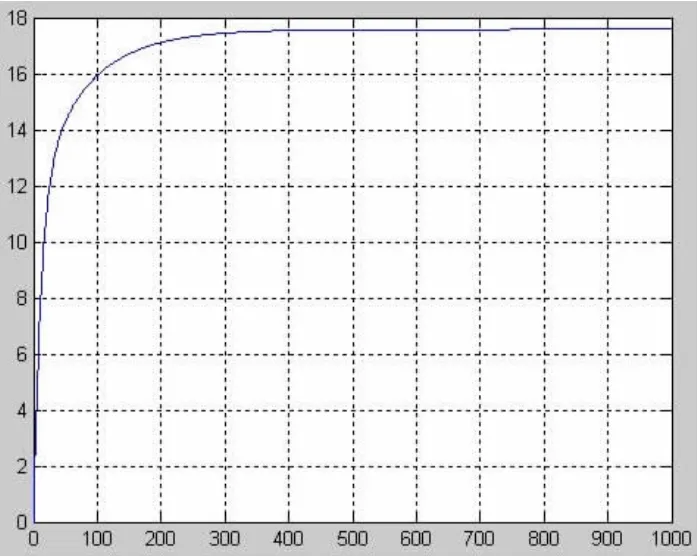
图6 设定点为25mm情况下系统的位置输出仿真曲线
结论:当u改为u2且系数变大时时系统过渡时间变长,而且稳定点也相应改变,即Mamdani型模糊控制器对于模型结构(如u的阶数的改变)基本没有适应能力,而且对系数的变化的反应不是很灵敏。
2.3 对动点的跟踪
下图为该模糊控制器对动点y=0.025t的跟踪(t为时间)。
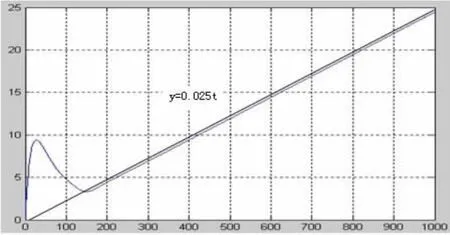
图7 对动点跟踪的位置输出仿真曲线
图7的位置输出仿真曲线开始有一点振荡,但经过一段时间后系统最终稳定在一条直线上,该直线与y=0.025t平行,但与该直线有一点偏差,这是由于每次采样都有时间间隔,从而造成控制动作的滞后所造成的。
结论:由于采样时间造成控制动作的滞后使得Mamdani型模糊控制器对动点的跟踪有少许偏差。
2.4 控制周期的改变
将上面所讨论的控制时周期为1s改为0.1s得如下位置输出仿真曲线:
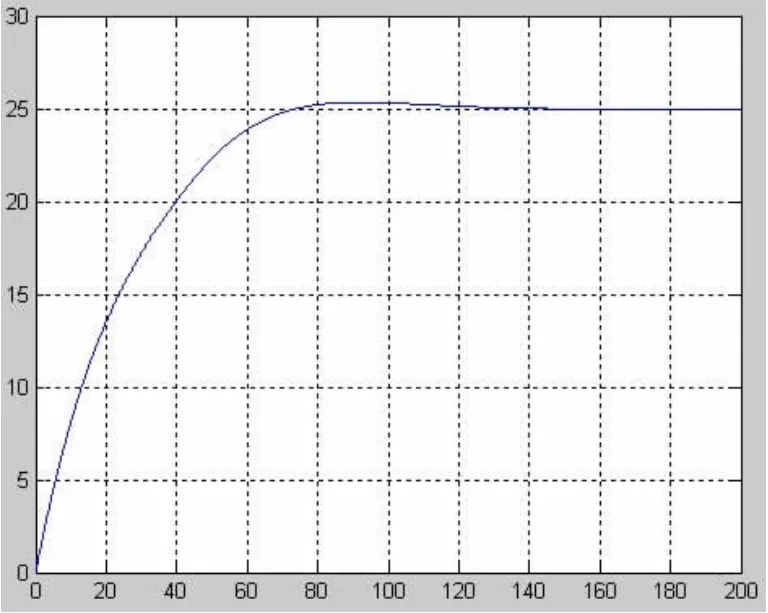
图8 设定点为25mm情况下系统的位置输出仿真曲线
图8与图1比较,可以得出控制周期减小,调节时间变短,且超调减小;控制周期增大,调节时间变长,且超调变大。
通过上述锅炉汽包水位控制特性仿真分析,我们得到如下一些重要结论:
(1)Mamdani型模糊控制器,对设定点的改变与系统模型结构的变化不具有适应性。
(2)对控制周期与对象参数系数的变化是敏感的。
(3)对动点的跟踪会有少许偏差。
[1]徐宗本,张讲社,郑亚林.计算智能中的仿生学:理论与算法[M].北京:科学出版社,2002
[2]朱传标.工业锅炉技术基础[M].上海:上海远东出版社,1999
[3]张松兰.工业锅炉汽包水位的模糊控制方案设计[J].武汉理工大学学报,2009,31(2):217-219
[4]唐令波.基于模糊PID的工业锅炉汽包水位控制系统的仿真研究[J].机械设计与制造,2009,23(2):110-111
[5]黄海运,肖航.船用锅炉汽包水位模糊控制研究[J].中国舰船研究,2009,(1):73-76
[6]鄢波,丁维明,魏海坤.工业锅炉汽包水位模糊自适应PID控制系统[J].发电设备,2006,(1):276-279
The character of the fuzzy controller on the boiler’s drum water lever and its simulation
PING Jing-shui,LIU Heng,Ma Xin
We study the corresponding behavior of the fuzzy drum water level controller:change of the set point;change the parameter;track to the dynamic figure;change of control time and add disturbance. We can draw the advantage and defects of the Mamdani fuzzy controller by analysis of these simulation curves of four kinds of situations.
Mamdani;Fuzzy control;Control characteristics;Simulation
O189.13
A
1009-9530(2011)04-0072-04
2011-04-22
安徽省自然科学研究项目(KJ2011Z344)
平静水(1964-),男,安徽凤台人,淮南师范学院数学与计算科学系副教授,主要研究方向为模糊集与粗糙集的应用。
