船载卫通站天线座架型式的分析
2011-12-27刘晓丽
刘晓丽
(中国电子科技集团公司第54研究所,河北石家庄 050081)
船载卫通站天线座架型式的分析
刘晓丽
(中国电子科技集团公司第54研究所,河北石家庄 050081)
分析了在船载卫通站伺服跟踪系统中采用A-E两轴座架型式和采用A-E-C三轴座架型式各自的优缺点。详细介绍了采用A-E两轴座架型式跟踪移动目标时产生正割补偿和跟踪盲区的原因以及解决正割补偿的办法。通过对船载A-E-C三轴座架船体运动的分解、坐标转换,指出了A-E-C三轴座架和A-E两轴座架型式的对应关系以及其之所以解决跟踪盲区的原理。
座架型式;正割补偿;跟踪盲区;高仰角跟踪
0 引言
近年来,随着我国航天飞船、航天飞行探测器技术的迅猛发展,船载移动卫星通信技术也取得了长足的进步。从神州一号的成功发射到神州七号载人飞船多圈绕地飞行再到嫦娥一号、嫦娥二号的长时间深空探测,远洋测量船上的船载卫通站(船载移动卫星通信系统)都扮演着重要的角色,在飞行器飞离大陆测控站监测范围时,它是大陆与飞行器联系的唯一纽带。由于远洋测量船要反复穿越赤道,而此时卫星通信天线位于星下点,天线跟踪的仰角高达80多度,传统的A-E座架将会给系统带来盲区,因此需要采用A-E-C三轴座架型式来解决传统的A-E座架高仰角跟踪带来盲区的问题,本文详细介绍了两种座架型式的区别以及跟踪的特点。
目前在车载以及近海船载卫通站系统中大都采用A-E两轴座架型式,它的优点主要是结构简单、平衡比较容易、体积小重量轻。然而基于A-E两轴座架型式的卫星通信系统在天顶存在盲区,并且在跟踪时方位轴存在正割补偿。而在远洋船载卫通站系统中主要采用A-E-C三轴座架型式,它的优点是解决了两轴座架型式无法解决的跟踪盲区缺陷,缺点是比两轴座架型式增加了C轴功率控制、体积大。
以下主要结合两轴和三轴座架型式就伺服系统高仰角跟踪的问题进行详细的阐述。
1 两轴座架型式
1.1 两轴座架的正割补偿
对大地坐标系中采用A-E两轴座架型式的卫星通信天线,以大地海平面为基准进行目标跟踪,如图1所示。

图1 天线方位上的正割补偿示意图
当跟踪的目标由B→C,需使天线轴线从AB→AC,这时天线方位轴从AO→AD,形成的区域为OAD。由图1可以看出区域OAD是区域BAC在大地平面上的投影,天线的俯仰角由E到E′变化,由图1几何关系可得出:

也就是说当目标在BAC平面内偏离电轴角度α时,天线方位需要转动α′才能对准目标。可以看出α′和α之间存在正割关系,这就是采用A-E两轴座架型式跟踪移动目标时方位轴需要正割补偿的原因。
1.2 两轴座架的跟踪盲区
由公式(6)可知当天线的轴线和目标之间的误差角α不变的情况下,方位角误差α′随仰角E′的增大而增大,式(6)对时间微分可得方位角速度:

式(7)对时间微分可得方位角加速度:

由式(7)可以看出当E′→90°时ωα′→∞在设计上是无法实现的,也就是说当目标在天顶周围时,采用A -E两轴座架型式的跟踪天线存在一个无法跟踪的高仰角区域,通常称为“跟踪盲区”,解决跟踪盲区的根本方法是采用三轴或四轴座架型式。
1.3 两轴座架型式跟踪采用的关键技术
由式(7)和(8)可以看出,对于采用A-E两轴座架型式的伺服跟踪系统,方位轴上的角速度、角加速度随俯仰角的增加而增加,因而加大了系统的动态滞后。为了解决这一问题最常用的方法是在方位支路跟踪信号和陀螺信号之后分别串接一个正割电位器,但由于正割电位器制造比较难,而余弦电位器制造相对容易,又因为secE′=′所以可用余弦电位器和放大器组合代替正割电位器实现正割补偿功能,如图2所示。或者采用数字处理将计算机采集的跟踪接收机误差信号和陀螺信号分别乘以secE′进行正割补偿后再送功率放大。
2 三轴座架型式
2.1 三轴座架船体运动的分解
远洋船载移动卫星通信站的天线座架型式一般都采用A-E-C三轴座架,下面通过对船体运动的分解来说明A-E-C三轴座架型式和A-E两轴座架型式之间的对应关系以及其能解决A-E两轴式座架型式存在跟踪盲区的原因。
对船载移动卫星通信系统来说,当船只在海上航行时除了船体本身的航行运动之外,在海浪的冲击下,还会产生周期性的摇摆运动。对于A-E-C三轴座架,这种摇摆运动在其上的投影,做以下分解,通过分解可以看出各轴应产生的相应运动已达到隔离这种摇摆的目的,分解是以速度为量纲的,因为速度是矢量,所以可用矢量合成的方法。这种分解是近似的。A-E-C三轴座架在船体运动中的分解关系见图3。
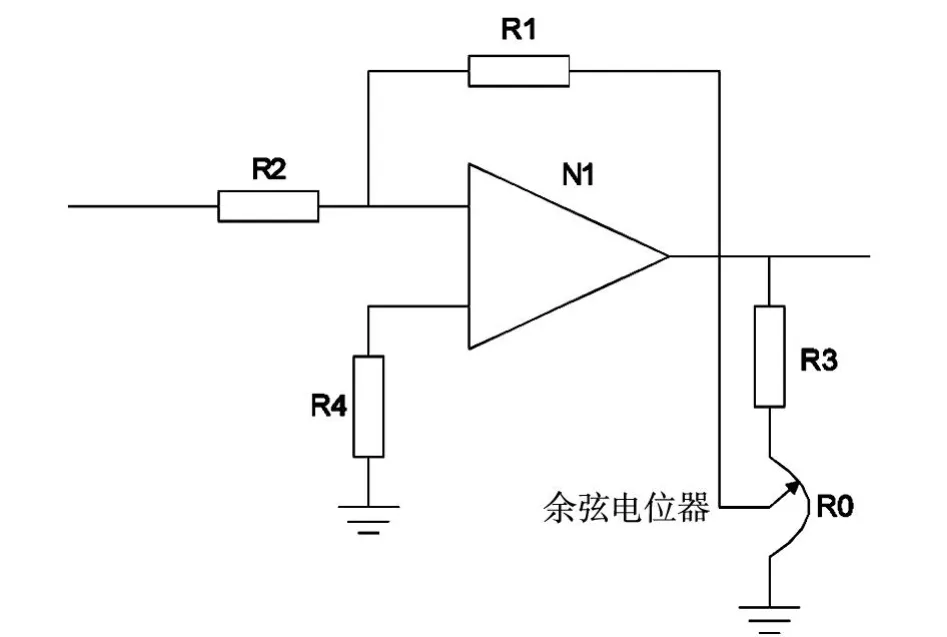
图2 余弦电位器电路图

图3 船体运动的分解
图3中ΩH、ΩP、ΩR为船的空间摇摆角速度分别在横摇轴、纵摇轴、艏摇轴上的投影,即横摇、纵摇、艏摇的角速度。也就是说船体的摇摆运动可以用横摇、纵摇、艏摇三个矢量来表征,三个矢量是正交的。将其分解为平面图如图4。
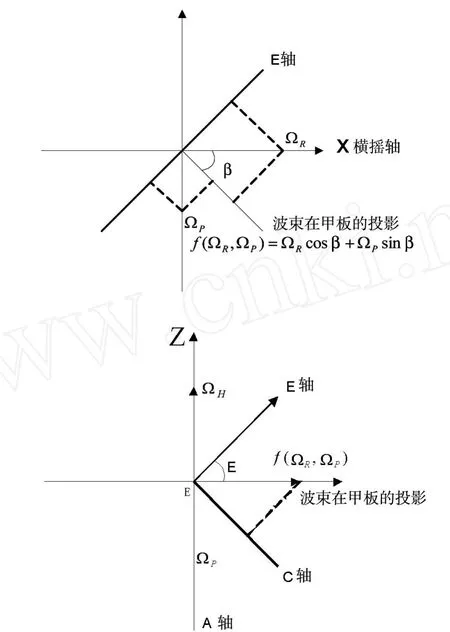
图4 船体运动的平面分解
从图4不难得出船体的摇摆运动在A-E-C座架三轴上的投影分别为

式中β为天线对准卫星时的地理方位角与船的航向角的合成角,及为天线的甲板角。从上面的推导可以得出,实际上A-E-C三轴天线座架就是在A-E轴系座架的基础上增加一个C轴,C轴落在E轴框架上,并与E轴正交。这样无论船的航向怎样变化,目标始终在EC轴所在平面的法线方向上,被跟踪的目标就不会出现在某一跟踪轴的轴线方向,所以不可能出现盲区。也就是说如果不是采用三轴座架而是采用A-E式两轴座架,那么船的摇摆运动在C轴上的投影分量就必须由A轴的运动来隔离,此时A轴的运动为

当仰角E较高时,ΩA就会很大,且需要正割增益补偿。当俯仰角 E→90°时cosE→0,ΩA→∞这样就会出现高仰角跟踪盲区。
2.2 三轴座架跟踪的关键技术
基于船载A-E-C三轴座架型式的伺服系统常采用三轴稳定两轴跟踪的形式,即方位轴随动船体航向,俯仰轴和交叉轴依靠安装在各自轴向上的陀螺以及跟踪接收机提供的俯仰、交叉误差信号稳定跟踪卫星波束。由船体运动的平面分解可以看出,天线波束的空间指向变化,可以分解为高低角和横轴角的的变化。那么由于船体运动所引起的波束指向变化,完全可以由高低角和横轴角的变化来表征。所以只要两个陀螺的敏感轴分别平行于高低轴(E轴)和横轴(C轴)那么他们就能敏感这种变化并通过控制回路加以修正。另外,方位轴也是被稳定的,它是用船上的罗经或者惯导提供的航向信号来稳定的。这样就保证了天线波束指向始终是垂直于E、C陀螺的敏感轴的,即垂直于E轴和C轴组成的平面,这也就保证了E轴和波束的高低轴,C轴和横轴的重合。在低仰角时,C轴平行于方位轴,C支路的陀螺稳定回路还可补偿航向的周期变化引起的波束指向变化,这就三轴稳定系统。
由于陀螺随温度、时间会产生漂移,电路的漂移、船体的不断航行,会引起波束指向的变化,为此采用自跟踪来修正这些误差。由跟踪接收机完成指向误差的分解,将指向误差分解为Δεe和Δεc分别送入E轴陀螺和C轴陀螺所在的陀螺环中,通过陀螺环修正天线的指向,这就是两轴跟踪体制。
3 两种座架型式的比较
两种座架型式的比较见表1。由表1可以看出两种座架型式各有各的优缺点,对于不同的区域针对不同的站型合适选择座架型式可以达到最优的跟踪性能。
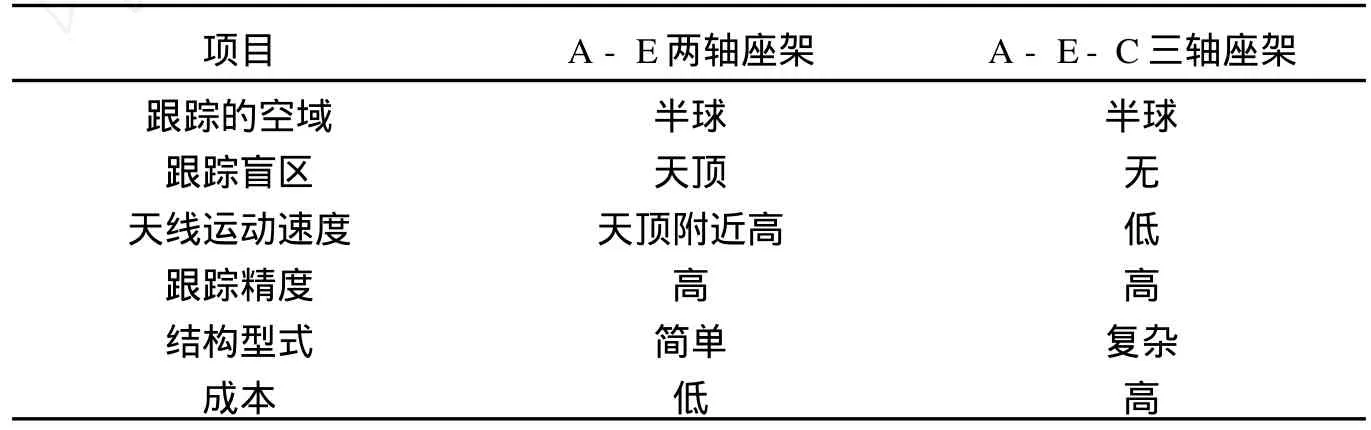
表1 两种座架型式对照表
4 结束语
综上分析可以得出当卫星通信站位于纬度20°~60°之间时,天线跟踪卫星的俯仰地理角在70°以下,因此对于车载和近海船载移动卫星通信系统采用A-E两轴座架型式就足够了,但是在进行跟踪时依然要在方位支路增加正割补偿。而对于远洋船载移动卫星通信系统来讲由于它们要频繁穿越赤道,跟踪仰角高达80多度,采用A-E两轴座架型式就不能解决高仰角跟踪盲区的问题,因此采用A-EC三轴座架型式以适应过顶跟踪的要求。
[1] 吴凤高.天线座架结构设计[M].西安:西北电讯工程学院,1975.
[2] 温桂森.动载体卫星通信天线控制数学模型[J].无线电通信技术,1997,23(4):36-40.
[3] 薛敦伟.影响天线高仰角跟踪性能的因素分析[J].遥控遥测,1998,19(2):34-40.
Analysis of antenna structure in the shipboard satellite communications system
LIU Xiao-li
(The54th Research Institute of CETC,Shijiazhuang Hebei050081,China)
It analyzed the advantage and disadvantage of antenna structure comparing A-E two axis w ith A-E-C three axis in shipboard satellite communications system,and introduced the reason of“Secant Compensation”and“tracking blind district”and the so lution of“Secant Compensation”in detail.By reso lving the ship motion and analyzing coo rdinates translation,it put fo rw ard the relation of antenna structure comparing A-E two axis w ith A-E-C three axis and the reason w hy A-E-C three axis can so lve“tracking blind district”.
Antenna structure;Secant Compensation;Tracking blind district;High-elevation tracking
TN820
:A
1001-9383(2011)02-0040-05
2011-03-25
刘晓丽(1975-),主要研究方向:计算机网络、卫星通信、天线伺服.
