踝关节康复受力测量装置研究
2011-12-26段学习王蕴岭
段学习,王蕴岭,汪 琦
(1.沧州职业技术学院电气工程系,河北沧州 061000;2.秦皇岛市骨科医院,河北秦皇岛 066000)
踝关节康复受力测量装置研究
段学习1,王蕴岭1,汪 琦2
(1.沧州职业技术学院电气工程系,河北沧州 061000;2.秦皇岛市骨科医院,河北秦皇岛 066000)
针对踝关节康复要求,基于生物医学知识和机构学知识提出串联运动链等效人体足仿生机构模型。设计开发出一种踝关节受力测量装置,将患者在康复过程中的足底受力折算到踝关节坐标系,间接得到患者踝关节康复受力值,可作为医护人员指导患者控制康复运动强度的参照数据。实验表明安装踝关节康复受力测量装置的康复器械提高了踝关节的康复效果,有效缩短了康复周期,降低了二次损伤的几率。
踝关节;康复;力;力矩
康复医学研究表明,功能康复训练中适宜的骨应力刺激可加速组织愈合并有利于恢复韧带的本体感觉,加快患者康复速度,还可预防由于踝关节不稳而造成的反复扭伤[1-3],因此运动康复系统CPM机在国内外得到广泛的应用。但是由于踝关节康复受力不易直接测量,CPM机不具备踝关节康复受力在线测量能力[4-8]。临床医生只能凭借经验指导下肢负重骨骨折病人做康复训练,病人也仅能通过主观感觉对踝关节康复强度进行控制,这难以保证康复效果,甚至可能因康复过程中康复强度过高导致踝关节二次损伤。
课题组结合生物医学和机构学知识,提出以串联运动链等效人体足的仿生机构模型,开发出踝关节康复受力测量装置应用于下肢康复器械,实现患者踝关节康复过程中受力的自主控制。
1 踝关节康复受力测量原理
1.1 踝关节模型
人足是由骨骼、关节、肌肉、韧带等组成的生理系统,其中骨骼承担压力,肌肉收缩产生动力,肌腱与肌肉实现关节的固定与连接。足关节包括距骨小腿关节和距下关节,两关节在机能上是联合关节。足跖屈时,关节窝大于关节头,能作轻度的旋转和侧方的运动。背屈时,关节稳固,不能作内收和外展运动。距下关节在运动时,跟骨和舟骨连同其余的足骨对距骨作内翻和外翻运动。足的内、外翻常伴以足的背屈。结合机构学知识,可知足关节具有3个转动自由度和1个方向的微量移动。足关节的3个转动轴线间的距离和轴线间的夹角很难测量,由足关节的运动情况和现有测量以及仿真结果可知,各转动轴线间距离很小,故足关节在机构学中可近似为S副[9-10],根据螺旋理论以3R副等效S副,则该模型等效为PRRR开链式串联分支。考虑到患者康复过程中,踝关节垂直方向变形较小,进一步把PRRR串联分支简化为3R串联分支[11]。建立肢体坐标系如图1所示。
1.2 运动模型静力分析
人站立时,以足跟结节,第1与第5蹠骨头3点着地。踝关节损伤患者术后康复过程中由于身体及心理因素而行动迟缓,患足部承受部分负重,步态与正常步态不同,通常足部平面接触地面,足部3个受力支撑点同时受力,其受力分布近似如图2所示。
坐标系OA-X1Y1Z1与踝关节固连,令踝关节回转副的回转轴线与Z1重合,考虑到患者康复过程中的行动特点,令踝关节固定,踝关节与固定坐标系固连。则脚部视为动平台,处于开式运动链的末端,动坐标系与其固连。采用D-H参数法描述脚部相对于踝关节的位姿。利用连杆坐标系,可以定义连杆参数如下:
ai=从Zi到Zi+1沿Xi测量的距离;
αi=从Zi到Zi+1绕Xi旋转的角度;
di=从Xi-1到Xi沿Zi测量的距离;
θi=从Xi-1到Xi绕Zi旋转的角度。
建立踝关节以下肢体D-H参数表,如表1所示。

表1 肢体分支D-H参数表Tab.1 D-H parameters table of physical branch
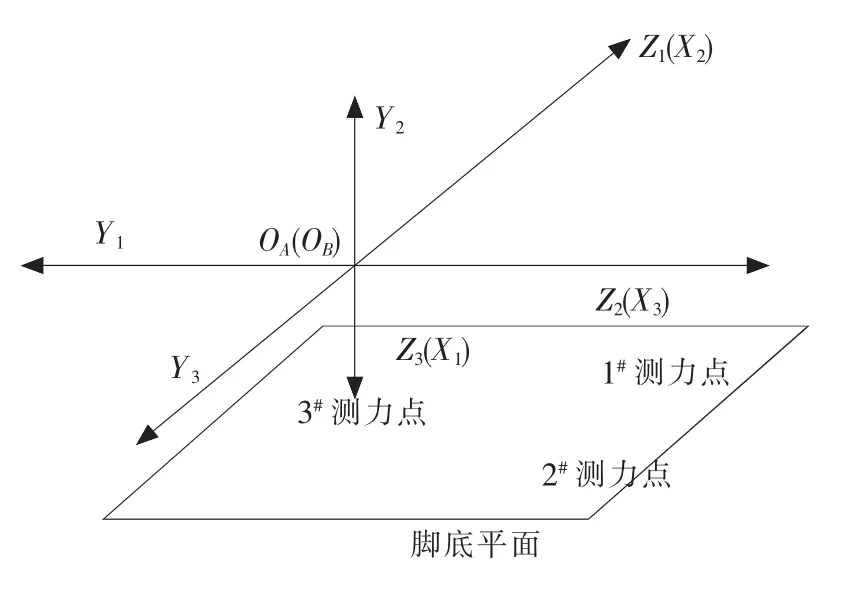
图1 肢体坐标系示意图Fig.1 Schematic diagram of body coordinate system
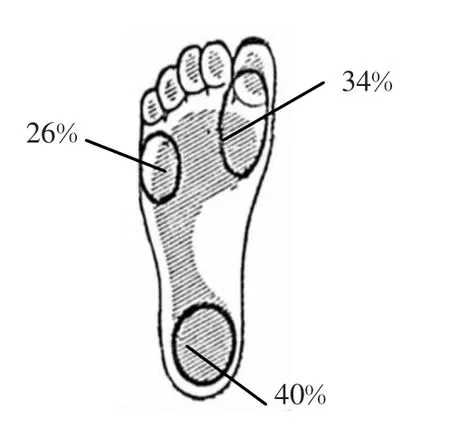
图2 足部受力分布Fig.2 Foot force distribution
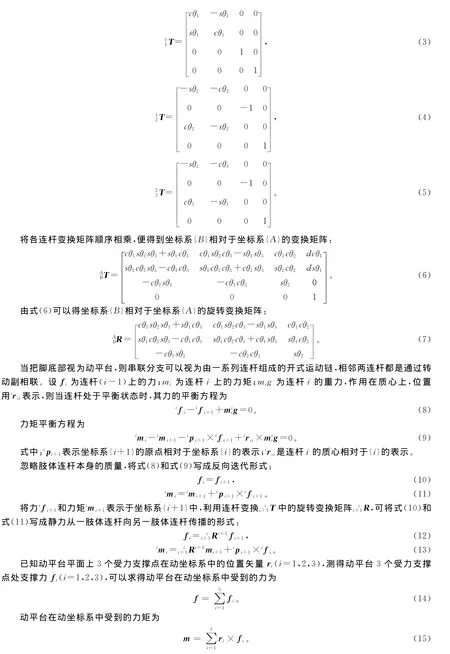
齐次变换矩阵:

式(1)整理后可得到连杆变换矩阵的一般表达式:

据以上分析可得等效串联分支各连杆变换矩阵如下:
由式(14)、式(15)分别代入式(12)和式(13)可以求得动平台所承受外力在固定坐标系中的表达式:

通过角度传感器获取踝关节角度,通过力传感器拾取动平台所受的支撑力,可以计算得到踝关节康复受力和力矩。
2 踝关节康复受力测量装置硬件结构
踝关节损伤患者处于康复期时,脚踝连同小腿以托架方式固定,故3R相对转角近似为零。为保证患者患肢平衡,康复器械的托架底部固定安装有4个力传感器的测力板测量踝关节康复受力[12]。带有踝关节康复受力测量装置的康复器械结构示意图如图3所示,托架用低温热塑材料制作,其大小形状根据患者脚踝参数量身定制,用于固定患者小腿和脚踝。力传感器采用电阻应变式传感器,在足跟结节着地点下方对称安装2个,第1蹠骨头与第5蹠骨头着地点各安装一个。控制电路系统硬件结构图如图4所示,康复力测量装置通过无线模块PTR2000与上位机通信。
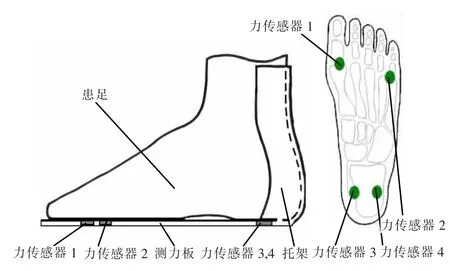
图3 踝关节康复器械示意图Fig.3 Schematic diagram of the ankle rehabilitation device
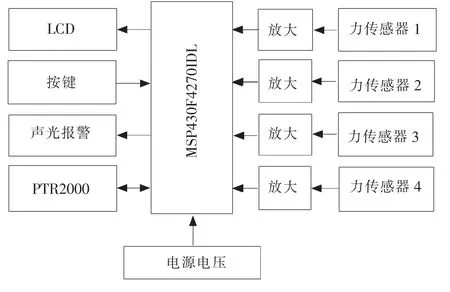
图4 系统硬件结构图Fig.4 Structure of system hardware
器械使用时,用粘接带将患足与运动训练器托架固定,康复受力测量装置控制器用粘接带粘接在托架小腿部位处,按医护人员要求设定安全康复极限后进行康复。康复过程中,患者根据康复受力测量装置测量的康复受力值自主通过拐杖调节患足康复受力。踝关节康复受力测量装置微处理器选取美国TI公司16位单片机MSP430F4270IDL。该型号微处理器电压低、功耗低,具有4个并行口,自带16位A/D转换器,2个16位定时器,串行通信接口,内置的硬件乘法器和温度传感器,满足系统力信号采集处理和数据通信需求,适用于以锂电池为电源的便携式仪器仪表。
3 实验数据分析
人足底具有多个自由度,即使踝关节没有转动,各力传感器受力随脚底形态变化而变化。1#至4#力传感器拾取动平台所受的支撑力,代入式(16)和式(17)计算出踝关节康复受力和力矩。某踝关节患者患肢负重50 kg强度康复过程中各力传感器测量计算得到踝关节康复受力、力矩如图5—图7所示。图中1#力为1#力传感器测量值,1#力矩为由1#力传感器测量值计算得到的力矩分量,其他3个亦然。
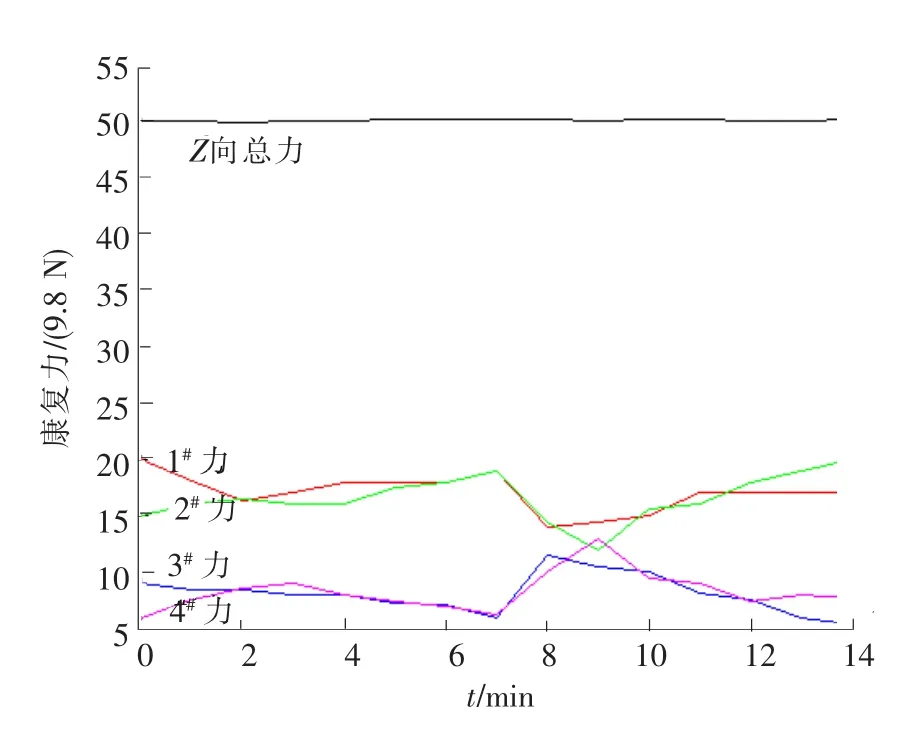
图5 踝关节Z向康复受力Fig.5 Z-ankle rehabilitation force
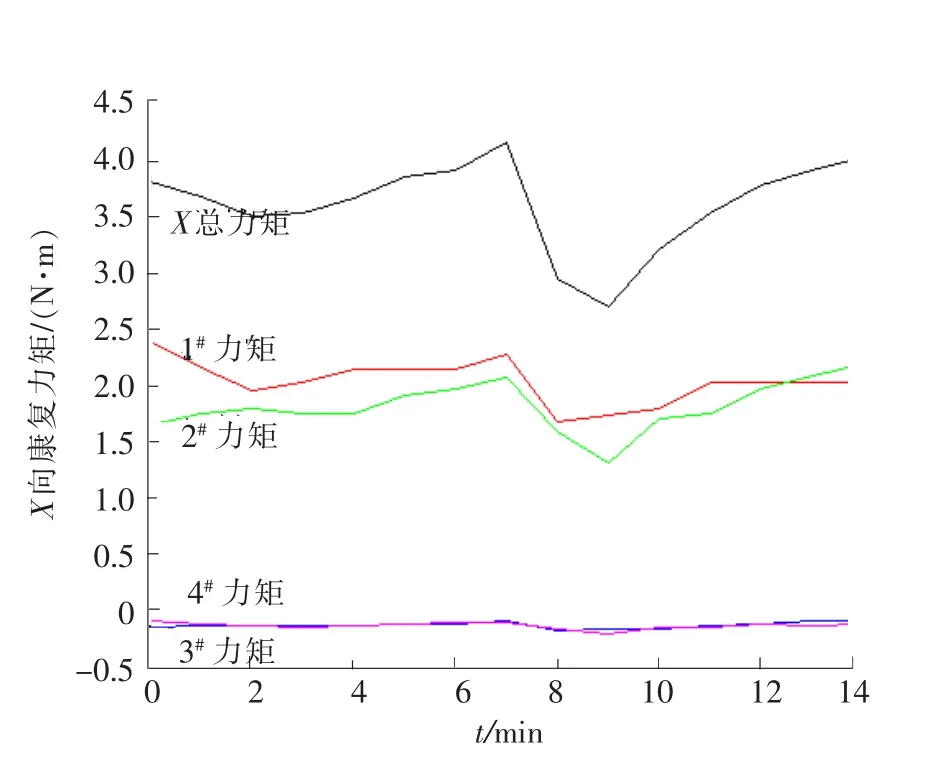
图6 踝关节X向康复力矩Fig.6 X-ankle rehabilitation torque
由图5可知在康复过程中康复负重不变时,Z向总康复受力基本保持恒定,可以作为脚踝Z向骨应力的计算依据。由图6可知X向总力矩大于某些力传感器测量分力矩,如果以X向总力矩作为脚踝局部损伤部位康复依据会导致康复强度不足,影响患者愈合速度。由图7可知以Y向的总力矩小于各个力传感器测量分力矩,如果以Y向总力矩作为脚踝局部损伤部位康复依据会造成应力过大,导致二次损伤。
经秦皇岛骨科医院40例资料完整、符合条件的老年骨折术后患者随机分实验组(应用带压力传感器保护装置的康复训练支具)和对照组各20例实验比对,实验组骨性愈合时间12~16周,平均13.7周,对照组骨性愈合时间14~20周,平均16.6周[13]。
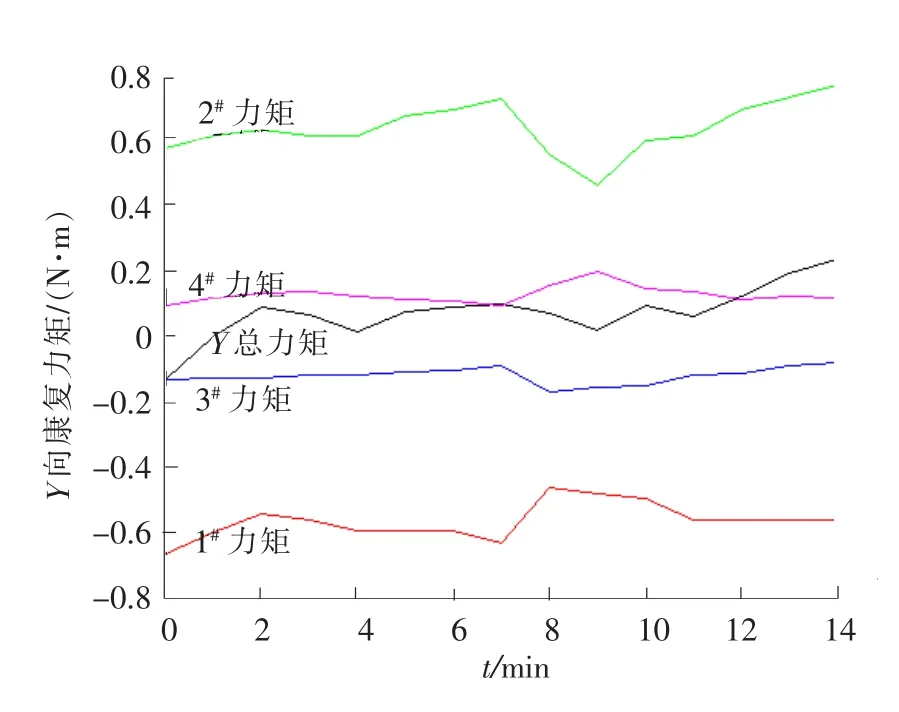
图7 踝关节Y向康复力矩Fig.7 Y-ankle rehabilitation torque
4 结 语
基于串联运动链等效人足仿生机构模型的踝关节康复受力测量装置实现了踝关节康复受力和力矩的间接测量,便于患者在医生的指导下自主地控制康复强度。经秦皇岛市骨科医院临床试用表明该系统应用于医疗康复器械能有效地帮助患者控制骨应力,提高脚踝损伤患者康复效果,缩短康复时间,具有一定的实用和推广价值。
[1] 李 丹.踝关节融合康复机器人系统的轨迹规划和运动控制[D].秦皇岛:燕山大学,2008.
[2] 杨朝虹,张海珠.机器人技术的应用与发展[A].先进制造技术论坛暨第五届制造业自动化与信息化技术交流会论文集[C].杭州:[s.n.],2006.
[3] GIMNE M,BURDEA G,BOUZIT M.The rutgers ankle’orthopedic rehabilitation interface[A].Proceedings of the ASME Haptics Symposium[C].Nashville:[s.n.],1999.
[4] DARIO P,GUGLIELMELLI E,LASCHI C.Humanoids and personal robots:Design and experiments[J].Journal of Robotic Systems,2001,18(12):673-690.
[5] KHALILI K,ZOMLEFER M.An intelligent robotic system for rehabilitation of joints and rstimation of nody degment parameters[J].IEEE Transaction on Biomedical Engineering,1988,35(2):138-146.
[6] RASYID H N,MENGB T R,SOEGIJOKA S J,et al.Design and realization of personal computer based continous passive motion device to prevent shoulder joint stiffness[A].The 2004 IEEE Asia Pacific Conference on Circuits and Systems[C].Taiwan:[s.n.],2004.
[7] WEIR R F,AJIBOYE A B.A multifunction prosthesis controller based on fuzzy-logic techniques[A].Proceedings of the 25th Annual International Conference of the IEEE EMBS[C].Cancun:[s.n.],2003.1 678-1 681.
[8] SCHMIDT H,PIORKO F,BERNHARDT R,et al.Synthesis of perturbations for gait rehabilitation robots[A].Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics[C].Chicago:[s.n.],2005.
[9] 潘 旺.足关节康复机器人系统设计与开发[D].秦皇岛:燕山大学,2007.
[10] 于海波.并联式踝关节康复机器人系统设计[D].秦皇岛:燕山大学,2006.
[11] 段学习.基于3-SPS/PS机构四维力传感器研究与仿真[D].秦皇岛:燕山大学,2009.
[12] 段学习,王蕴岭,汪 琦.脚踝康复受力测量电路的设计[J].电子测量技术(Electronic Measurement Technology),2010,33(7):8-10.
[13] 汪 琦,段学习,闫江涛,等.压力保护支具在老年股骨粗隆间骨折术后康复训练中的应用[J].中国综合临床(Clinical Medicine of China),2011,27(1):19-22.
Study on ankle rehabilitation force measuring device
DUAN Xue-xi1,WANG Yun-ling1,WANG Qi2
(1.Department of Electric Engineering,Cangzhou Vocational Technical College,Cangzhou Hebei 061000,China;2.Qinhuangdao Orthopaedic Hospital,Qinghuangdao Hebei 066000,China)
According to the requirements for ankle rehabilitation,based on biomedical knowledge and institutional knowledge,the equivalent of open serial kinematic chain model of human foot bionic body is built.An ankle rehabilitation device is designed to get the force of ankle rehabilitation indirectly by static analysis of integrated model and change of the plantar force to ankle rehabilitation coordinate system.The rehabilitation equipment with ankle rehabilitation force measuring device can improve the effect of ankle rehabilitation and shorten the recovery time.
ankle;rehabilitation;force;torque
TP249
A
1008-1542(2011)05-0460-06
2011-06-01;
2011-09-02;责任编辑:冯 民
河北省科技基金资助项目(092764180D-4)
段学习(1974-),男,河北河间人,讲师,硕士,主要从事机电一体化技术应用方面的研究。
