空间平台能力发展趋势分析
2011-12-26刘永健谭春林刘育强
刘永健 谭春林 刘育强
(北京空间飞行器总体设计部,北京 100094)
1 引言
空间平台是指为有效载荷正常工作提供支持、控制、指令和管理保障服务的各分系统的总称,其本质是服务保障系统。作为空间活动的主体,空间平台是空间应用的承载体,也是空间活动得以实现的基础与前提。经过几十年的发展,空间平台技术不断取得突破性进展,能力不断提升,有力地支撑了各类空间应用活动。
在轨维护与服务、地外生命探索等新应用需求的不断涌现,对空间平台的能力要求越来越多,也越来越高。现有空间平台的能力在大范围快速机动、在轨操作和多飞行器协同配合等诸多方面难以满足新应用的需求,已经开始显露出制约空间应用的迹象。
本文从满足在轨维护与服务等新应用需求的角度出发,提炼了未来空间平台所需的8 种能力,分析出实现相应能力所需的关键技术,希望对空间平台技术的规划有所帮助。
2 国外研究现状
对空间平台能力的追求已成为技术攻关的目标,特别是航天大国,均开展了大量的研究,通过各种关键技术攻关与演示验证不断提升平台能力,以满足未来的空间应用需求。美国在1998年提出了“空间机动飞行器”(SMV)的概念,要求空间平台模块化,具备快速大范围机动、伴飞与交会、智能自主、可携带载荷并进行多种类型在轨操作的能力[1]。SMV是提升空间平台能力的一种探索,并由此拉开了美国自主在轨服务领域研究与试验的序幕。近期,对空间平台能力和技术的验证,成为美、俄开展飞行演示验证的主要内容之一。本文以美国近期开展的典型项目为例进行分析。
1)“轨道快车”计划
美国“轨道快车”(Orbital Express)于2007年3月8日发射升空,2007年7月22日完成了全部演示任务[2-3],图1为该计划示意图。它由“太空自动化运输机器人”(AS TRO)和“未来星/货舱飞行器”(NextSat/CSC)组成。其中, AS TRO是一种面向在轨服务的空间平台,具备很强的机动变轨能力,能够迅速进入目标星NextSat 的轨道;配备有高度自动化的机械臂系统,具备较强的在轨操作能力,能够初步代替航天员完成太空作业。
进入太空之初,两星相连,相互交换有关数据;然后,两星分离,AST RO 设法捕获NextSat,一旦锁定NextSat 且赶上它之后,ASTRO 伸出机械臂,将NextSat 拉回身边,再完成在轨可更换模块(ORU)传送及燃料传输等演示任务。Orbital Express 计划不但验证了自主交会对接、自主跟踪监视、在轨维护与服务等能力,也展示了其空间捕获其他卫星的能力。
2)“试验卫星系统”计划

图1 Orbital Express 计划示意图Fig.1 Schematic graph of Orbital Express
美国“试验卫星系统”(XSS)系列的目的是研制一种全自主控制的微小型卫星,这种卫星具有在轨检查、交会对接及围绕轨道物体近距离机动的能力。XSS-10 于2003年1月28日由德尔他-2 火箭发射升空,随后从运载火箭第2级中弹出并逼近该目标,在200m、100m、35m 的距离上对火箭第2级进行了拍照,演示验证了半自主运行和近距空间目标监视能力[4]。图2为XSS-10 卫星结构示意图[5]。XSS-11 于2005年4月11日发射,进入高约850km 的预定轨道,进行为期12~18个月的自主逼近在轨目标的演示验证试验,并与美国6~7个在轨人造物体(废弃的火箭上面级和废弃卫星)实施自主交会[6]。

图2 XSS-10 卫星Fig.2 XSS-10 satellite
3)“自主交会技术演示”计划
美国“自主交会技术演示”(DART)卫星于2005年4月15日发射,其主要任务是在轨与名为“多波束超视距通信微小卫星”(M UBLCOM)进行一系列自主交会、逼近和绕飞操作,验证DART所携带的遥感器、计算机、推进系统及软件的性能[7]。DART 卫星只在太空工作了11h,距目标星91.44m时就提前结束了任务(原计划在太空试验24h,距目标星近达4.6m),不过这一结果也能证明,完全由计算机控制的卫星可在太空找到目标星,未来空间平台实现智能自主具有可行性。图3为DART 卫星结构图。
4)“深度撞击”计划
2005年7月4日,美国“深度撞击”(Deep Impact)计划中的撞击器以10.2km/s 的相对速度与坦普尔-1 彗星成功碰撞,留下一个深度大于25m 的坑(见图4)[8]。Deep Impact 由主探测器和撞击器组成。其中,350kg 的撞击器是一个电能航天器,可独立操作1 天,在脱离主探测器后能自主导航并加速飞向坦普尔-1。该计划体现了美国自主导航、远程通信和精确控制等空间技术领域的实力。
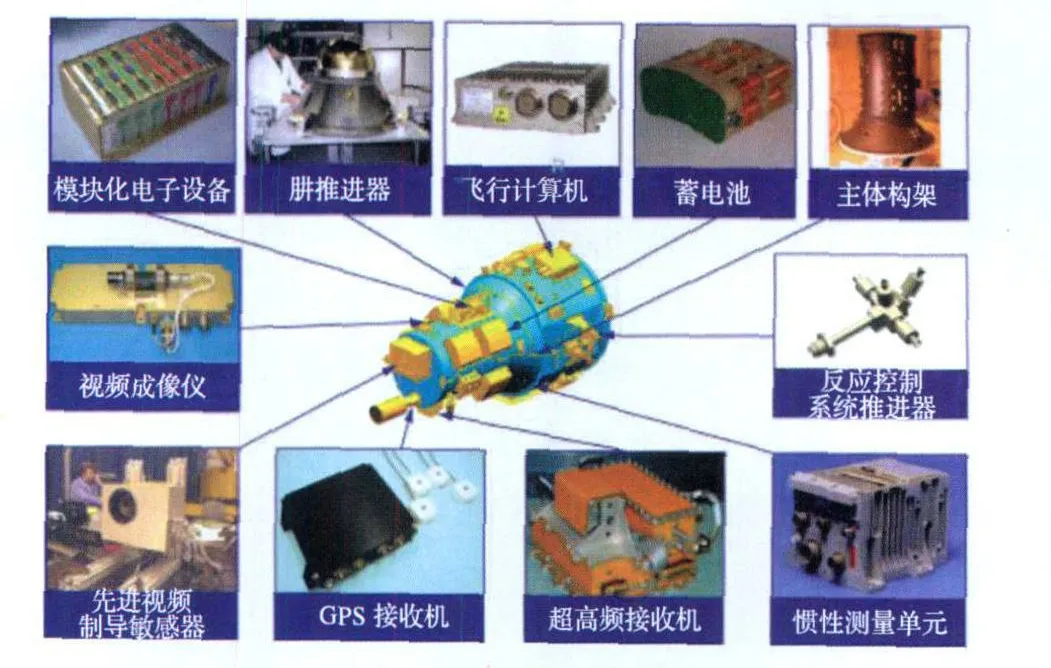
图3 DART 卫星Fig.3 DART satellite
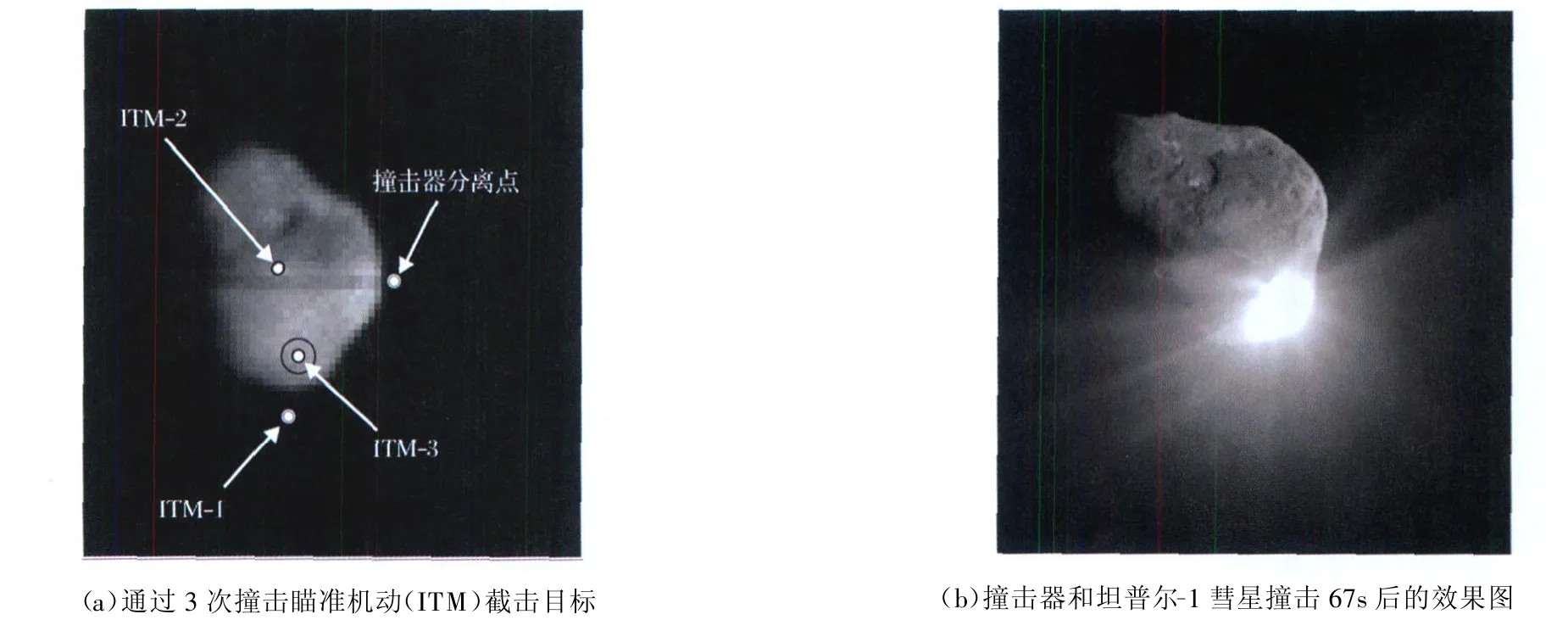
图4 撞击器与坦普尔-1 彗星相撞Fig.4 Impactor collison with Tempel-1
5)“微卫星技术试验”计划
美国“微卫星技术试验”(MiTEx)计划是其执行Orbital Express 计划演示低轨在轨维修服务能力后,首次在地球静止轨道演示轨道机动技术和执行在轨监测检查任务。MiTEx系统包括火箭上面级和2颗小卫星[9],见图5[10]。火箭上面级装有太阳电池阵和姿态控制星敏感器,可在轨持续飞行几周甚至更长时间,其铂/铑双组元姿态控制推力器因康镍燃料箱可贮存较多燃料,因此不但可将2颗小卫星从转移轨道送入静止轨道,而且可以进行多种轨道机动。2颗小卫星主要是确定、集成、试验和评估与地球静止轨道机动有关的微小型卫星技术,它们在2008年年底至2009年年初对失效的国防支援计划-23(DSP-23)导弹预警卫星成功进行了在轨监测。

图5 MiTEx系统组成Fig.5 System composition of MiTEx
6)“未来、快速、灵活、模块化、自由飞行航天器”
2005年9月,美国国防高级研究计划局(DARPA)开展了“未来、快速、灵活、模块化、自由飞行航天器”(F6,见图6)概念研究,并且将其作为“作战快速响应太空”计划的重点项目。其基本设想是未来航天器由一个自由飞行载荷模块和多个提供动力、能源、通信等功能的自由飞行模块组成,不同模块通过编队飞行和无线传输方式协同工作,共同完成特定任务。其技术特征可归纳为“功能分解、结构分离、无线链接、编队飞行”。该计划共分四阶段完成:2009年2月,波音等4 家宇航公司共同完成了第一阶段的研究,主要突破了分布式计算、无线能量传输和星群自主导航控制等5 项关键技术[11],发展了以价值为中心的设计方法(VCDM)[12];2009年11月25日,轨道科学公司单独获得第二阶段的合同,合同期为1年,主要进行系统详细设计,完成关键硬件原理样机研制、大系统半实物仿真和绝大部分软件开发等工作;而首次在轨演示验证已由2011年推迟至2013年。

图6 F6系统设想图Fig.6 Imagination layout of system F6
F6 无论在军用、民用还是商用航天领域都具有巨大的应用潜力,一旦取得突破,未来航天器设计理念、体系结构、运行管理、制造和发射模式,甚至航天产业的组织结构都可能发生革命性变革。
3 空间平台能力发展需求
美国开展的研究项目已经开始从在轨机动、在轨操作、智能自主等不同的侧面尝试提升现有空间平台的能力,以满足机动逼近、维修维护、自主任务规划/自主运行等应用需求。针对这些需求,本文分析总结了空间平台需要显著提升的8 种能力。
1)在轨机动能力
机动能力是空间平台的基本能力,既包括轨道机动,也包括自身姿态的机动。轨道机动包含共面机动和异面机动,主要涉及轨道转移、交会、绕飞、伴飞、规避等变轨能力。对机动能力的考核重点,要关注时间和距离2个基本要素,一般以速度增量进行量化。
在轨操作对空间平台的机动能力提出了明确的要求,空间应急营救、维修、加注、规避,在轨组装、编队飞行等操作,都要求大范围快速轨道机动。其中涉及的主要关键技术有:轨道机动规划技术;轨道机动动力学技术;先进高能推进技术;轨道机动过程中的制导、导航与控制技术;交会与绕飞技术;轨道机动末段姿态快速稳定技术。
美国近期开展的演示验证试验均包含了在轨机动的内容,基本上具备了实用能力,且所实现的机动能力较强,如SMV 的最大速度增量达到了3.2km/s。国内目前仅开展了部分关键技术研究,在轨实际应用的能力还较弱,基本处于小范围或长时间的机动,对于如何满足机动的时效性,还有必要开展更深入的研究。
2)空间目标识别、跟踪与测量能力
这种能力主要是指对空间目标的探测、发现、识别、跟踪与测量的能力,目的是获得操作对象的轨道位置、运行特性、外形特征等信息,并将这些信息提供给自身的信息系统进行动作规划与调整,从而保证空间平台适时机动到正确的位置,以及在轨操作的精度和监测操作效果。这些信息也可提供给其他航天器,纳入整个空间信息系统,协助完成整体的空间任务。该能力涉及的主要关键技术有:目标识别、跟踪与测量基础理论;目标识别、跟踪与测量敏感器技术;目标识别与跟踪测量系统的信息融合技术;在轨操作效果评估技术。
目前,俄罗斯和美国均已具备了对合作目标和非合作目标的星(船)载自主跟踪与测量的技术能力。俄罗斯/苏联对合作目标的交会对接的发展经历了卫星与卫星、飞船与飞船、飞船与礼炮号、和平号空间站及“国际空间站”交会对接等阶段,自主测量设备主要采用微波雷达;对非合作目标的轨道交会的自主测量系统,包括微波雷达系统和红外光学系统两类,并分别进行了打靶试验,其中,微波雷达系统试验7次,成功5次,红外光学系统试验3次,均未成功。美国“阿波罗”飞船进行登月舱和指令舱交会对接时,采用X频段单脉冲比幅连续波雷达,结合目视光学瞄准镜,由航天员以手控方式进行交会对接操作。美国航天飞机与和平号空间站、“国际空间站”交会使用的雷达是Ku频段脉冲多普勒雷达,具有通信收发功能,以时分方式工作,具有跟踪能力。而Orbital Express是全自主识别、跟踪与测量能力的飞行演示验证。
3)空间信息处理与传输能力
空间平台在获得空间态势信息后,需要对数据进行预处理,并及时地通过信息链路传输到应用单元。这就要求空间平台有高速信息处理和大容量信息传输能力,具备高可靠的信息加密手段及灵活的组网模式。该能力涉及的主要关键技术有:多源数据在轨预处理技术;高可靠空间信息传输技术;星间通信技术。
国外空间信息处理与传输相关技术的发展趋势是:采用更高频段(Ka、EHF频段)和更完善的星上处理技术,具备为生存而重构的能力,更有效地按需分配技术和抗辐射、抗实际攻击的能力。选择更高频段可使天线波束变窄,频带宽,跳频范围大,降低信号被截获和受干扰的可能性,也可使地面天线等设备小型化,通信终端更加灵活机动。采用V频段星间链路(或交叉链路),以扩大静止轨道系统的覆盖区,而无需地面中转站。美、俄、欧、日都已发展跟踪与数据中继卫星,除统一使用S、Ka频段,均发展星间光通信技术。
4)智能自主能力
由于测控网的覆盖区域有限,地面系统实时监测低轨航天器运行状态的时间,仅为航天器工作时间的百分之几,因此在地面监测下能够完成的操作任务非常有限。同时,航天器的遥测遥控数据非常有限,很难完全反映航天器的在轨运行状态。在在轨操作的过程中,地面只可能给出一些宏观的指令,需要空间平台根据星上设备状态及燃料、能源等各种约束,自主规划出系列动作及其流程,并动态应对瞬息万变的空间环境。因此,智能自主能力是适应未来空间应用特点的一种主要趋势。该能力涉及的主要关键技术有:航天器自主任务规划技术;航天器整星信息综合总体技术;航天器实时状态监测技术;航天器自主决策技术;航天器故障诊断与自恢复技术;自主导航技术。
美国在自主管理技术上处于领先地位,最具有代表意义的航天器是深空-1(DS-1),采用了远程代理(Remote Agent)技术,是第1个使用人工智能技术进行自主管理的航天器。
俄罗斯在研制和维护和平号等空间站的过程中积累了大量航天器自主管理的经验。其中包括:大功率液体火箭发动机健康监测和寿命评估与预测系统,针对暴风雪号航天飞机开发的轨道实时自动监测、预测系统,以及货运飞船与空间站的交会系统等一系列成果。日本研制的工程试验卫星-7(ETS-7)于1998年成功进行了空间自动交会对接试验。此外,日本对“国际空间站”日本实验舱的环境和生命支持系统(EC LSS)的故障诊断技术作了详细深入的研究。
5)在轨操作能力
未来空间平台的主要任务就是实现各种在轨操作。空间平台执行的任务目标不同,对其在轨操作能力的要求不同。例如:执行在轨模块更换任务时,需要对象捕获、模块转运和设备插拔等能力,而执行在轨监测任务时,往往只需对绕飞或伴飞对象进行拍照。目前,首要发展的应该是对象捕获和物体移动能力。在轨操作能力涉及的主要关键技术有:在轨停靠技术;空间机械臂技术;在轨维护与维修技术;在轨更换技术;在轨加注技术;在轨释放与投送技术;遥操作技术。
目前,在这一领域处于领先地位的是美国、加拿大、欧洲和日本,典型的例子就是美国的Orbital Express 计划和日本的ETS-7 计划。欧洲以德国宇航中心(DLR)为主,进行了一项完全类似于ETS-7的试验计划——“试验服务卫星”(ESS)计划,其目的是研制可在空间环境下利用遥操作控制机械臂来修理损坏卫星的试验机器人。加拿大正在开展用于在轨服务的自由飞行器研究,主要研究内容为地面遥控、远程控制、在轨规划、载荷捕获、传感器校准及故障检测技术等。
6)多载荷与任务适应能力
为了适应不同的任务需求,空间平台需要有灵活更换有效载荷的能力,因此需要为各种载荷提供统一的机电热接口,使载荷本身与平台具有相对的独立性。同时,空间平台在执行在轨操作任务时需要多次往返于不同轨道,这就要求平台具备在不同轨道上运行的能力,这对平台的结构、热控等功能提出了较高要求。该能力涉及的主要关键技术有:通用载荷接口技术;大功率快速放电技术;瞬间大容量热排放和精密热控技术。
当前,各国发展的航天器大多针对某种急迫的任务需求,发展只能搭载单一载荷完成特定功能的专用航天器,也发展了部分具有灵活承载能力的通用飞行平台,如“轨道转移飞行器”(OTV)、“轨道机动飞行器”(OMV)、SMV 等,但其通用性主要体现在载荷的互换性方面,在针对任务的自适应能力方面还比较欠缺,比如变构型、短时大功率放电、瞬间大容量热排放等。
7)协同与组合能力
协同与组合能力主要是指多星协同工作和在轨扩展的能力,既要求能够迅速集群,又要求能够迅速分散。有许多任务是单一航天器很难完成的,需要多个航天器配合进行;同时,空间系统总的发展趋势是系统化和体系化,空间平台要纳入到整个空间体系中,作为空间体系中的一员,发挥自身特有的作用。该能力涉及的主要关键技术有:编队飞行技术;无线数据与能量传输技术;网络化技术;在轨扩展技术;航天器模块化、标准化设计技术。
目前,星间通信以及相对位置测量和保持控制等技术,在Orbital Express、E TS-7 等计划中得到了部分的试验和验证。近来,美国发展的F6系统,其实质是建立一种面向未来的灵活、高效的航天器体系结构,将传统的整体式航天器分解为可组合的分离模块,各分离模块可以快速批量制造和独立发射,在轨运行时通过无线数据链接和无线能量传输,构成一个具备 完整功能的虚拟航天器,使得该系统在全寿命周期内具备系统重构和功能再定义的能力,大大提高在轨系统的灵活性、可扩展性和可维护性。
8)威胁告警与防护能力
威胁告警与防护能力主要是指通过探测空间碎片等的目标特性和轨道特征,预测产生威胁的可能位置、可能对自身的毁坏形式及可能的时间等,进而发出威胁告警信号,并根据不同威胁类型采取自主防护措施,如机动规避、释放诱饵等。该能力涉及的主要关键技术有:威胁告警技术;碰撞预警技术;探测预警感知技术;航天器被动防护技术;航天器主动防护技术。
威胁告警与防护分为主动式防护和被动式防护两大类。其中:主动式防护主要是通过星载威胁告警系统发现空间碎片等危险源,从而采取主动的机动规避、拦截等手段;被动式防护则是通过抗辐射加固、隐身、防撞击结构等方式来提高航天器的抗攻击承受能力。目前,美国主要在役及在研卫星均采取了相应的防护措施,典型的例子有“军事星”(M ilstar)通信卫星、GPS系统、“长曲棍球”(Lacrosse)侦察卫星、DSP 导弹预警卫星、“锁眼”(KH)系列侦察卫星等,其中KH 卫星的机动规避能力相当强。
4 结束语
空间平台技术的研究是空间技术研究的重要组成部分,是提升空间应用能力和水平的前提条件。经过几十年的发展,我国空间技术已经取得了长足的进步,但要满足未来空间平台的能力需求尚有较大差距,建议重点针对未来可能的应用群策群力,集智攻关,实现相关关键技术的有效突破,并逐步演示验证,逐步应用到工程实践,最终全面提升空间平台的各项能力,为更好地实现空间资源利用作贡献。
References)
[1]欧宁,刘映国.空间机动平台在航天器维护保障中的应用前景[J].装备指挥技术学院学报,2008,19(4):47-50
[2]Ogilvie A,Allport J,Hannah M,et al.Autonomous robotic operations for on-orbit satellite servicing[C]//H ow ard R T,Motaghedi P.Sensors and systems for space application II.Orlando:SPIE,6958,2008:1-12
[3]Mulder T A.Orbital Express autonomous rendezvous and capture flight operations,Part 2 of 2:AR&C Exercise 4,5,and End-Of-Life[C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Honolulu,Hawaii:AIAA,2008:1-22
[4]Davis T M.XSS-10 micro-satellite flight demonstration program results[C]//Tchoryk P,Jr.,Wright M.Spacecraf t platforms and infrastructure.Bellingham,Washington:SPIE,5419,2004:16-25
[5]闻新,王秀丽,刘宝忠.美国试验小卫星XSS-10系统[J].中国航天,2006(6):36-43
[6]闻新,王秀丽,刘宝忠.美国试验小卫星XSS-11系统[J].中国航天,2006(7):22-25
[7]H ow ard R T,Bryan T C.DART AVGS performance[R].Orlando:Marshal Space Flight Center,2007
[8]Frauenholz R B,Bhat R S,Chesley S R,et al.Deep impact navigation system performance[J].Journal of Spacecraf t and Rockets,2008,45(1):39-56
[9]Osborn M,Clauss C,Gorin B,et al.Micro-satellite Technology Experiment(MiT Ex)upper stage propulsion system development [C]//43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit.Cincinnati,Ohio:AIAA,2007:1-13
[10]梁斌,徐文福,李成,等.地球静止轨道在轨服务技术研究现状与发展趋势[J].宇航学报,2010,31(1):1-13
[11]刘豪,梁巍.美国国防高级研究计划局F6 项目发展研究[J].航天器工程,2010,19(2):92-98
[12]O'Neill M G,Yue H,Nag S,et al.Comparing and optimizing the DARPAsystem F6 program value-cent ric design methodologies[C]//AIAASPACE 2010 Conference&Exposition.Anaheim,California:AIAA,2010:1-17