三相电压型整流器双环PI数字控制设计
2011-12-21王磊
王 磊
(韩山师范学院物理与电子工程系,广东潮州 521041)
三相电压型整流器双环PI数字控制设计
王 磊
(韩山师范学院物理与电子工程系,广东潮州 521041)
三相电压型整流器的控制环路设计一直是一个未能彻底解决的难题.文章给出了基于状态空间平均模型并结合空间矢量脉宽调制的PID双环控制的设计过程,并对给定参数的实例进行了仿真验证.通过仿真实例与设计过程的比较,分析指出了设计过程中的固有问题及解决方向.
三相电压型整流器;双环PID控制;数字控制;空间矢量脉宽调制
1 引言
近年来,由于能量可双向流动、效率高和功率因数高等优点[1],三相PWM整流器逐渐取代传统的相控二极管/三极管桥式整流器,成为许多用电设备的基本组成部分.
三相桥式电压型整流器是三相PWM整流器的一种常用形式.它的控制目标主要有两个:高功率因数和输出电压的稳定.最直接的方法是采用两个PI控制器分别对输出和无功功率进行控制,控制无功的电流环作为内环,对输出电压的控制作为外环.电流环对无功的控制,可以采用由逆变器借鉴而来的空间矢量调制方法.
三相电压型整流器环路设计的难点在于[2]:双环控制较为复杂,系统的非线性较强,采用线性化模型描述及线性控制方法难以同时得到稳态和暂态的理想特性.
基于三相电压型整流器的状态平均模型,本文给出了结合空间矢量脉宽调制的PID双环控制的设计过程,并对给定参数的整流器电路进行了仿真验证.通过实例调试与设计过程得到的参数比较,指出了设计过程中的固有问题及解决方向.
2 三相电压型整流器的数学模型
三相电压型整流器的拓扑结构见图1.由于同一桥臂上下的开关管互补导通,只需要Sa、Sb、Sc三个开关量即可实现整流器的控制.
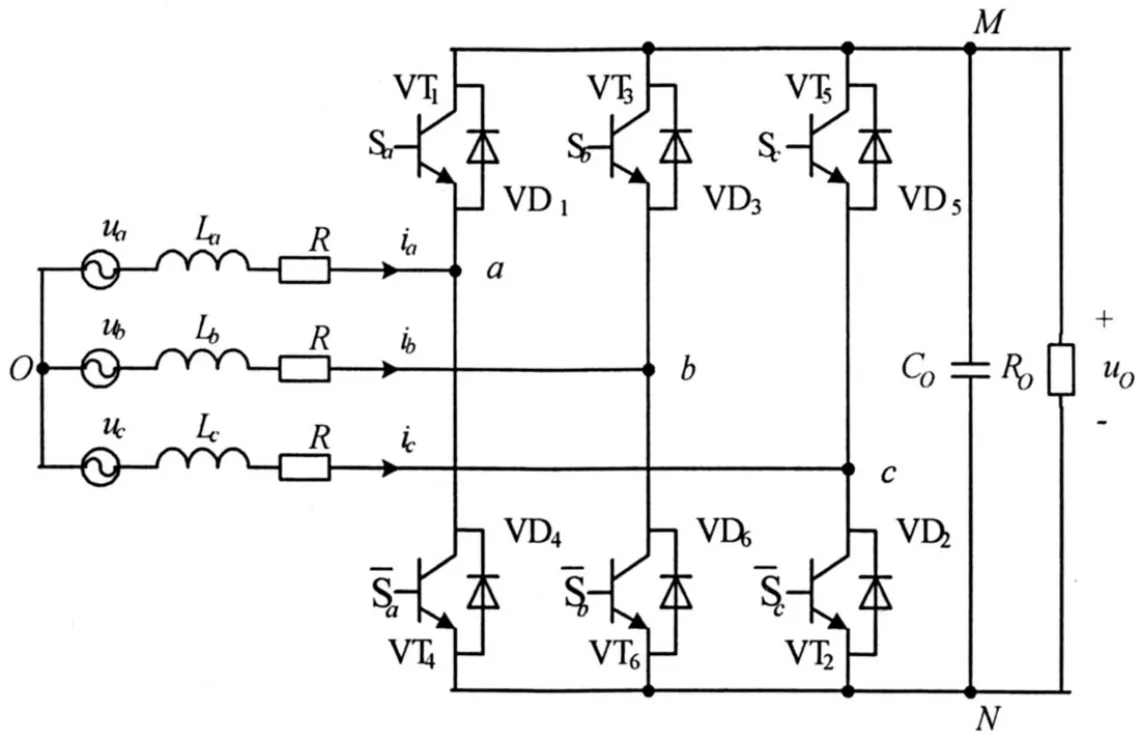
图1 三相电压型整流器的拓扑结构
其中整流器的输入为理想的三相交流电压源,表达式为:

通常把三相电压型整流器的状态方程变换到d-q旋转坐标系下.进行这个坐标变换有以下优点:可以分离电流的有功和无功分量加以单独控制;依据三相三线系统无中线电流的条件得到维数降低的方程.以三相交流输入源合成的空间矢量为参考向量,三相电压型整流器在d-q旋转坐标系下的动态方程为:

其中Sd、Sq为d-q旋转坐标系下的开关量,用来实现对整流器桥臂的通断控制.
3 双环PID数字控制设计
方程(2)描述了整流器主电路的工作情况,下面进行整流器控制环路的设计.令ud=uods,uq=uosq作为系统的控制输入.
首先进行电流内环的设计.对电流内环采用PI控制,并加入前馈控制令三相输入电流的有功分量id和无功电流iq解耦[6],则ud、uq的控制方程为:

式中Kip、Kii为电流内环比例、积分调节的增益,i∗d、i∗q分别为id、iq的指令值,分别为单相输入电流幅值Im和0.
由于两个电流内环的对称性,可以仅考虑对id控制设计.空间矢量调制的矢量位置有一个开关周期的延迟,AD采样带来半个开关周期的延迟[3],结合主电路的小信号模型,得到电流内环控制结构图如图2所示.其中为令电流内环有较快的电流跟随性能,可按典型Ⅰ型系统设计[4],为此,只需以PI调节器的零点抵消电流控制对象传递函数的极点.

图2 三相PWM整流器电流内环控制结构图
由此得到PI调节器参数为:

其中R为电感和开关管寄生电阻之和.
下面考虑对电压外环的设计.因为电压外环通过电流内环而起作用,首先得到id的闭环表达式.由于二阶项系数较小,在低频区段可以暂时忽略,得到简化的电流环闭环传递函数为:

电压外环同样采用PI控制.由于开关频率远高于电网的交流输入电压频率,为了简化控制系统设计,忽略高频分量,只考虑开关量的基波分量,则有:

式中θ为开关量的基波初始相位角,m为PWM调制比,取值为 3Vref/νdc,Vref为空间指令电压矢量的幅值.
在单位功率因数运行条件下,整流器的输入电流与交流输入电压是同相的交流量,为

则三相整流器的输出电流idc可以由开关控制量描述如下(代入(8)(9)两式):

考虑到电压外环的采样延时,结合主电路的小信号模型,得到电压外环控制结构图如下图3所示.其中电压外环被PI调节器整定为Ⅱ型系统.

图3 三相PWM整流器电压外环控制结构图
由典型Ⅱ型系统的控制器参数关系[5]可得电压外环的PI调节器参数如下:

其中h为中频频宽,ιv为电压外环采样惯性时间常数.
4 空间矢量脉宽调制方法(SVPWM)
SVPWM最先应用于逆变器空间电压矢量的切换,以获得准圆形旋转磁场.它的优点是,在开关频率不高的情况下,不仅在静态,甚至在暂态期间都能形成准圆形旋转磁场.
将SVPWM应用于整流器控制之中[7],主要继承了SVPWM电压利用率高、动态响应快等优点.从前面章节的内外双环可以合成执行SVPWM所需的指令电压空间矢量,执行SVPWM算法即得出开关管的占空时间,从而完成对系统的控制.
由于同一桥臂上下管互补导通,三相桥式电压型整流器共有8种工作状态,对应在空间形成6个有效的电压空间矢量V1~V6(幅值为2/3Vdc)和两个零电压空间矢量V0、V7,如图4所示.6个有效的电压空间矢量将整个平面分成6个扇区.SVPWM调制的基本原理是:根据伏秒数相等的原理把指令电压空间矢量分解为所在扇区相邻两个有效电压矢量之和,每个分量的大小表示该电压矢量作用的时间.
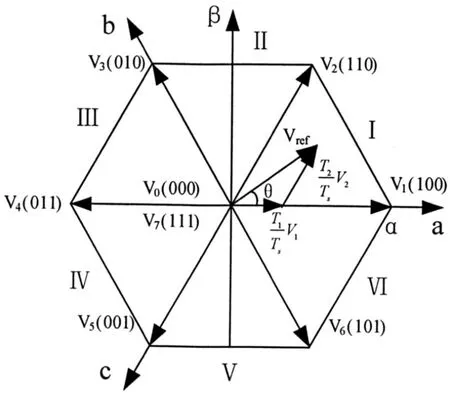
图4 电压空间矢量图
在图4所示的α、β参考坐标系中,任何电压空间矢量Vref可以表示为:

传统的SVPWM算法是利用上式计算Vref所在扇区及其在每个扇区的位置角θ,进而依据三角形正弦定理得出占空时间.然而事实上很难用数字处理器来实现式(14)的算法,因为反正切计算比较复杂,若采用查表法又会浪费大量的存储空间,且适应性较差.
下面给出直接利用Vα和Vβ,采用参考电压来判断扇区和计算作用时间的方法.此算法和传统的SVPWM算法是等价的,分为三个步骤:
(1)判定指令电压空间矢量Vref所在的区域.首先定义:

若Vx>0,则A=1;否则A=0.若Vy>0,则B=2;否则B=0.若VZ>0,则C=4;否则C=0.令sum=A+B+C,则可按照下面表1的关系,由sum值查出当前指令电压空间矢量所在的扇区号.
(2)计算相邻电压矢量的作用时间.令:
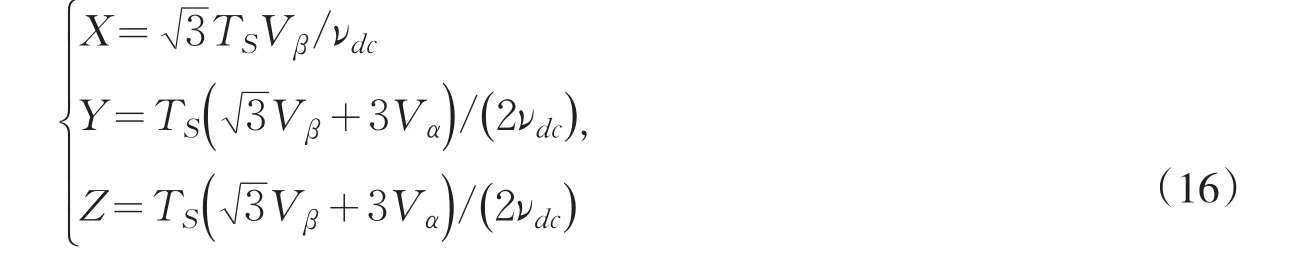
首先按(16)式计算出X、Y、Z的值,再依照扇区号查表1得出两个相邻电压矢量的作用时间T1、T2.

表1 sum与扇区的对应及相邻矢量作用时间表
(3)过调制处理和占空时间产生
如果算出的T1和T2导通时间之和小于等于Ts,则插入零矢量V0或V7,使总的导通时间等于Ts.如果算出的T1和T2导通时间之和大于Ts,这种情况称为过调制,简单的可以用下式来校正:

设计完成的三相电压型整流器双环PID数字控制结构图如下图5所示.首先从输入输出信号的A/D采样到电压外环,内电流环id的基准由外电压环产生;iq的基准固定为0;双环系统运算得到了Vcd和Vcq,再由d-q旋转坐标变换到α-β两相静止坐标后,得到了Vα和Vβ,最后经过SVPWM环节即可得出占空时间,用以控制整流器.
5 仿真验证
为了验证上述设计过程的实用性,特对一个主电路设计完备的三相电压型桥式整流器进行仿真验证.整流器的参数见表2.
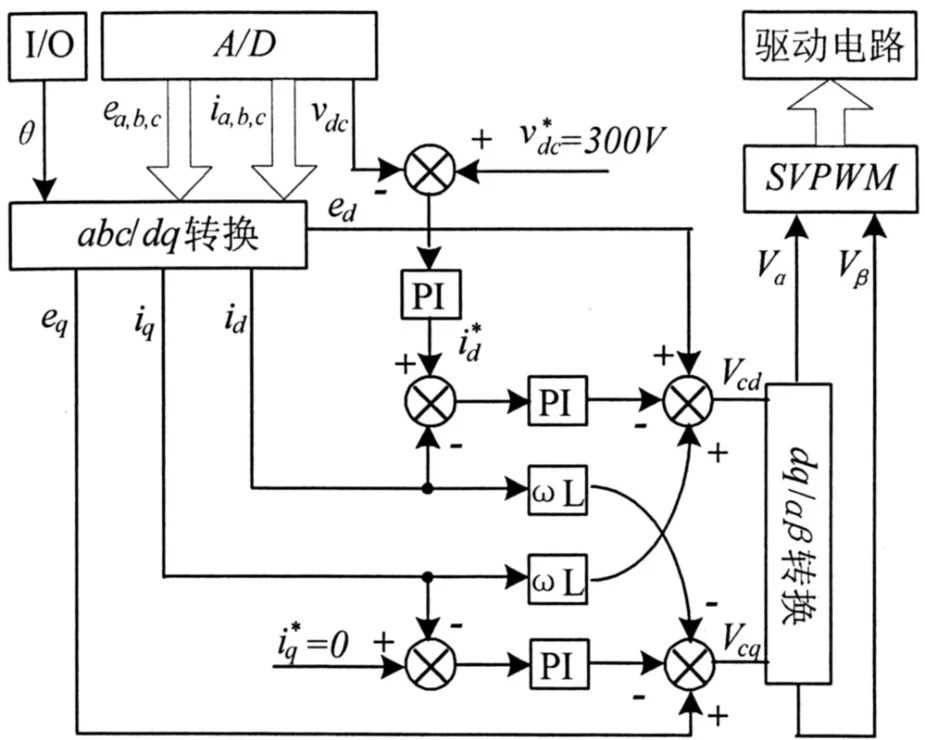
图5 三相电压型整流器双环PID数字控制结构图

表2 三相电压型桥式整流器的主电路参数
按照表2中的数据,当输出电压采样网络取1/150倍增益时,Kpwm取2.则应用(5)、(6)两式计算得到:Kip=86.7;Kii=6667.
电压环中频宽h可取为5;并令外环采样惯性时间常数ιV为Ts,应用(11)、(12)计算得到:

计算得到的环路参数未必是最佳的.因为计算中得到的模型是基于稳态运行的,而且忽略了很多因素,实际中对环路的动态调整能力有较高的要求.为此必须在计算参数的基础上,加以手工调试.
环路的调试遵循先调节内环,内环得到较为理想的特性后,再对外环进行调整的原则;对单个环路的调试,按照先比例再积分的原则,比例的调整应能快速到达期望的工作点;出于对功率因数校正的要求,输入电流波形也要求为较好的正弦波形,为此积分作用不宜太强,以免造成波形的较大畸变.
通过调试,得到如图6的三相桥式电压型整流器的仿真波形,从输出电压Uo的波形可见,无论在稳态或零状态起机,输出电压均可稳定于设定值;由三相的输入电流和输入电压波形的对比,输入电流在SVPWM算法及PI控制下与输入电压保持同相,而且波形接近正弦;三相整流器环路控制两大目标基本得到实现.

图6 三相桥式电压型整流器仿真波形
仿真中采用的PI参数与设计值有一定的偏离.仿真系统Tvs=2000∗TV,Kvs=0.02∗KV,Kips=3∗Kip,Kiis=Kii.
从这个比较可以看出,电流环的计算偏差不大.仿真中,电流环采用设计的参数系统可以稳定于预设值,但得到的波形不是最佳,能够作为调试的基准进一步优化;电压环响应的快速会导致电流环基准变化太快,系统不稳定,因此外电压环的比例大幅降低;考虑到要求输入电流为正弦,积分效应也相应减弱,避免带来波形的畸变.
总的来说,由于有些设计要求在环路设计中无法预先考虑(如功率因数对输入电流波形要求为正弦形)和一些忽略的因素实际有一定的影响(如对电流内环的简化),导致设计值和实际仿真值具有一定的偏差,但设计值可以为调试提供一个较好的初值.
6 结论
本文系统地给出了结合SVPWM的三相电压型整流器双环PI数字控制设计的全过程,然后用数字仿真对设计进行了验证,并探讨了设计过程与仿真参数存在差异的原因.
核心原因在于设计中采用的数学模型与具体电路运行规律之间有较大差异.由于平均模型对系统的动态描述较差,而在多环路设计的过程中对模型有不少近似处理,并且令系统在全负载范围工作良好的参数整定有一定难度.
多环路的线性控制设计本身存在一些问题:就控制的本质而言,补偿令系统的阶次升高,响应更加复杂;由于设计中采用近似,外环的特性通常达不到预想;暂态响应时间较长.
为提高电路的性能,应充分发挥数字控制芯片的功能,与智能控制相结合,直接运用一些非线性控制方法;这样可以采用更精确的数学模型对环节的非线性特性进行描述,从而得到最优的控制方法.
[1]张兴.PWM整流器及其控制策略的研究[D].安徽合肥:合肥工业大学,2003:61.
[2]张波.电力电子学亟待解决的若干基础问题探讨[J].电工技术学报,2006,21(3):24-35.
[3]高金源,夏洁.计算机控制系统[M].北京:清华大学出版社,2007:147.
[4]王孝武.现代控制理论基础[M].北京:机械工业出版社,1998:127.
[5]王建辉,顾树生.自动控制原理[M].北京:清华大学出版社,2007:270.
[6]YANG Y,KAZERANI M,QUINTANA V H.Modeling,control and implementation of three-phase PWM converters[J].IEEE Transactions on Power Electronics,2003,18:857-864.
[7]HABETLER TG.A space vector-based rectifier regulator for AC/DC/AC converters[J].IEEE Trans Power.Electron.1993,8(1):30-36.
The Dual-loop PID Digital Control Design of Three-phase Voltage-Source Rectifier
WANG Lei
(Department of Physics and Electronic Engineering,Hanshan Normal University,Chaozhou 521041,china)
The control loop design of three-phase voltage-source rectifier has not been fully resolved in recent years.Based on the state-space averaging model of the rectifier,this paper proposes the design process of dual-loop PID digital control design integrates the space vector modulation technique.It is then verified by an example in simulation.A comparison between the design and the simulation reveals the inherent problem in the design and possible solutions.
Three-phase voltage-source rectifier;dual-loop PID control;digital control;SVPWM
TM463
A
1007-6883(2011)06-0034-07
2010-10-10
广州2012年珠江科技新星专项项目资助:基于RB-IGBT的矩阵整流器关键技术研究.
王磊(1978-),男,湖南娄底人,韩山师范学院物理与电子工程系教师.
责任编辑 朱本华
