自动垂直钻井执行系统试验研究
2011-12-11聂云飞吴仲华孙浩玉张乐启耿应春
聂云飞,吴仲华,孙浩玉,张乐启,耿应春
(1.胜利石油管理局钻井工艺研究院,山东东营257017;2.胜利石油管理局渤海钻井一公司,山东东营257000) *
自动垂直钻井执行系统试验研究
聂云飞1,吴仲华1,孙浩玉1,张乐启2,耿应春1
(1.胜利石油管理局钻井工艺研究院,山东东营257017;2.胜利石油管理局渤海钻井一公司,山东东营257000)*
在自动垂直钻井系统中,要求执行系统能够对控制系统的指令做出迅速、准确的响应。由于执行系统的结构复杂,通过理论模型研究的方法很难得到其准确的性能参数。建立了室内模拟试验系统,完成了执行系统工作性能的试验研究,得出了其压力-上盘阀驱动扭矩、流量-压力、压力-纠斜力拟合曲线和关系式,并证明了研制的执行系统的工作性能符合自动垂直钻井系统的控制要求。
自动垂直钻井;执行系统;井斜;试验研究
自动垂直钻井系统能够通过自身的井下控制系统自动控制钻井过程中的井斜角度保持在规定的范围内,并具有对斜井纠斜的功能,整个控制过程无需人工干预,较以前的防斜、纠斜和直井的钻井方法更先进[1-8],可以极大地提高工作效率,降低风险、成本。该技术是目前世界上最先进的垂直钻井技术,胜利钻井院近几年持续开展开了自动垂直钻井技术的研究工作,执行系统在控制系统的控制下可以实现自动垂直钻井功能。由于防斜执行系统的结构较复杂,所建立的流体力学模型很难接近实际情况,因此单纯通过理论分析的方法来设计和优化其系统结构是不现实的。研究人员采用了室内模拟试验研究的方法确定了相关参数,完成了防斜执行机构的研制工作。
1 自动垂直钻井系统结构和原理
自动垂直钻井系统主要由控制系统、延伸短接和执行系统组成,结构如图1所示。控制系统是自动垂直钻井系统的“大脑”,框图如图2,可以根据检测的井斜角控制下部的执行系统,使其产生一定方向和大小的纠斜力。执行系统(样机如图3)则是自动垂直钻井系统的“四肢”,按照控制系统的指令工作。执行系统的3个推力装置在钻井液的驱动下推动3个推力巴掌装置外伸,推靠井壁,产生纠斜力。控制系统中的控制单元根据测量单元获得的井斜数据向扭矩发生器单元发出控制指令,控制其输出轴按照一定的转速相对钻柱反转。盘阀装置中的上盘阀与扭矩发生器的输出轴通过连轴器连接,随输出轴一起转动。盘阀装置的下盘阀有3个过流孔,分别与3个推力装置的流道相通,上盘阀有1个过流孔。上盘阀在扭矩发生器的驱动下,可以控制下盘阀3个过流孔的导通和关闭,以此控制钻井液的流量分配,从而实现自动垂直钻井系统对纠斜力的方向控制[9],执行系统样机结构参数如表1。
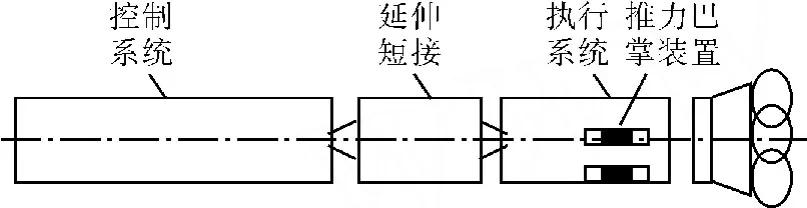
图1 自动垂直钻井系统结构示意
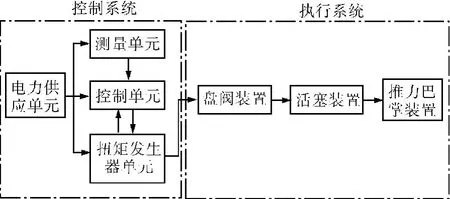
图2 自动垂直钻井系统控制框图

图3 自动垂直钻井系统执行系统样机
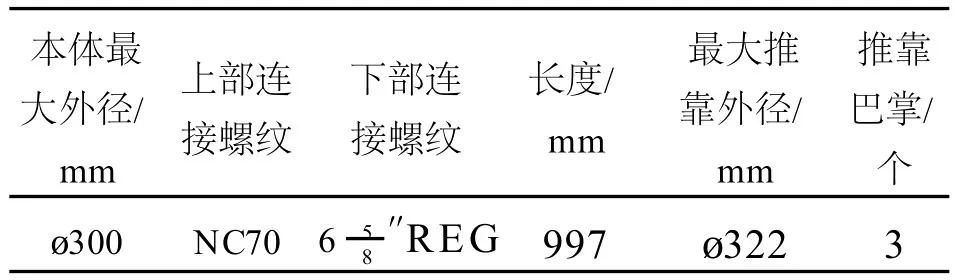
表1 自动垂直钻井系统执行系统样机结构参数
2 室内试验系统设计
自动垂直钻井系统工作时,要求执行系统能够对控制系统的控制指令做出迅速、准确的响应,以满足整个系统的控制要求,据此对执行系统提出了以下技术要求:
1) 驱动盘阀装置需要的扭矩必须小于扭矩发生器单元输出轴的额定工作扭矩,要求驱动扭矩均值约5 N·m,峰值<10 N·m。
2) 推力巴掌装置能够产生15~20 kN的纠斜推靠力。
3) 推力装置能够迅速响应控制系统发出的指令,产生相应的脉冲推力,驱动推力巴掌装置工作。
4) 执行系统的额定工作压降控制在4.0~5.5 MPa,活塞喷嘴分流量控制在6 L/s以内。
根据上述技术要求设计了如图4的试验系统,模拟自动垂直钻井系统的井下工作状况。离心泵扬程550 m,排量250 m3/h,配90 kW电机。测量仪表参数如表2。
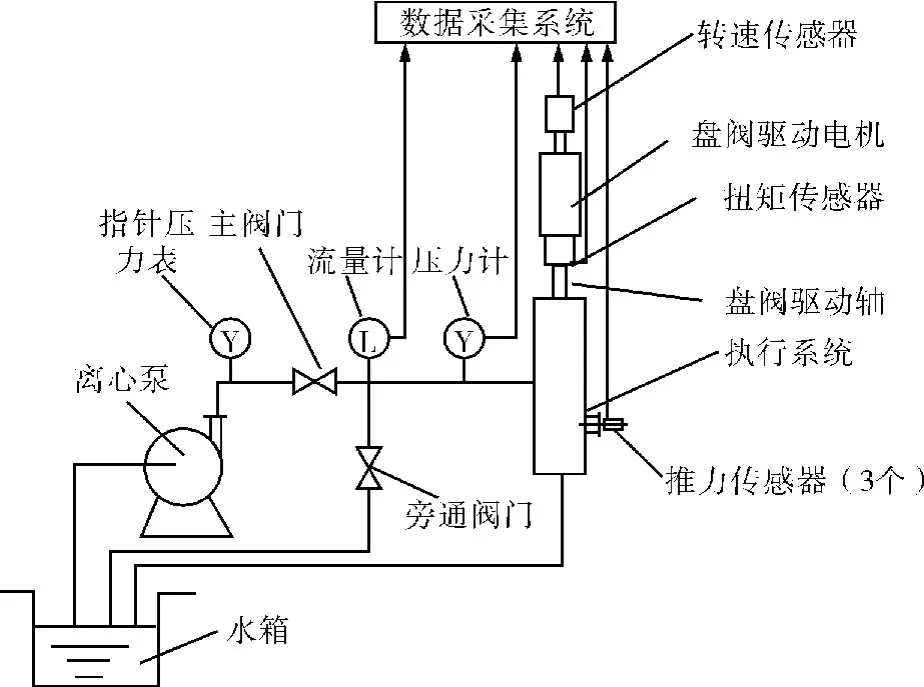
图4 室内试验系统原理

表2 测量仪表参数
盘阀驱动电机为直流调速电机,通过16∶1的减速器减速后与上盘阀连接。使上盘阀可以在0~250 r/min内无级调速,转速传感器(为旋转编码器)直接与电机的尾部输出轴(高速轴)连接,因此能够测量的上盘阀最小转角为0.037 5°。
3 试验结果
3.1 推力装置推力
推力装置是执行系统推力产生的力源,为了满足控制系统的需要,流体在盘阀装置的控制下驱动3个推力装置发出相位角相差120°的脉冲力(试验结果如图5所示),通过叠加后可以在一定的方向上产生一个纠斜合力,并最终通过推力巴掌装置作用在井壁上。
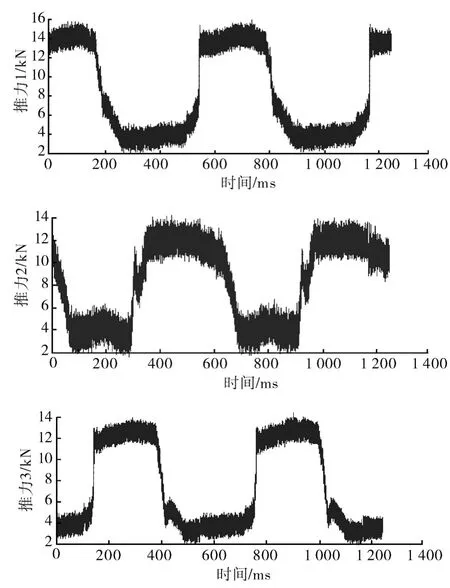
图5 相位差120°的脉冲力
实际试验过程中,执行系统入口压力5 MPa,转速81 r/min时,纠斜推力可以达到15 kN左右,如图6所示,从图中可以看出脉冲推力动态响应性较理想,上升和下降沿在20 ms左右。
3.2 盘阀装置扭矩
首先测量了上盘阀的空载驱动扭矩,如图7。空载测量时压力、排量均为零,转速253 r/min时,得到空载扭矩值为

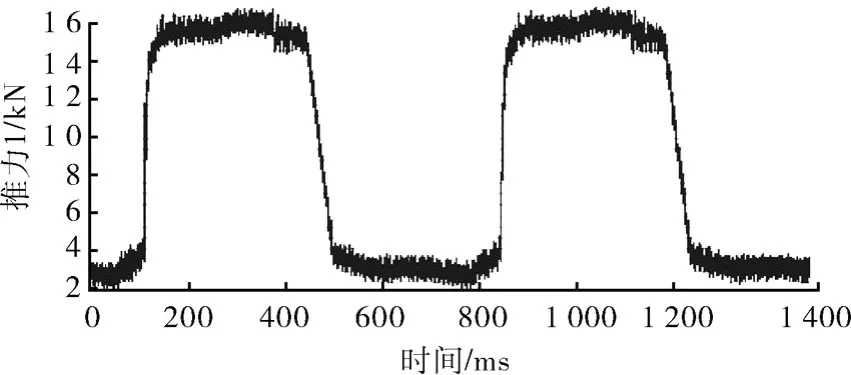
图6 推力-时间曲线
针对执行系统的不同入口压力,通过对上盘阀的转速进行调节,测得了相应的上盘阀驱动扭矩(均值),如图8所示。可以看出,相同压力情况下,转速的变化对上盘阀驱动扭矩的影响很小,因此在研究盘阀的性能时把重点放在了压力对上盘阀驱动扭矩的影响方面。

图7 空载时间-扭矩曲线
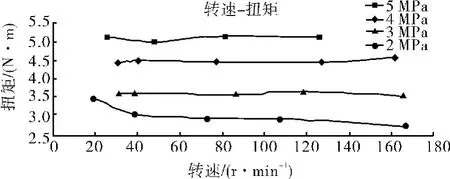
图8 不同压力下的转速-扭矩试验曲线
图9是以5 MPa,转速81 r/min时的室内试验数据绘出的上盘阀的压力-扭矩试验曲线,线性拟合得到的方程为

式中,T为上盘阀驱动扭矩,N·m;p为执行系统入口压力,MPa。
拟合得到的线性方程中的截距为 T′0=2.591 4 N·m,与实际测量的空载平均扭矩值 T0=1.31 N·m有差距。根据试验的情况分析,主要是由于试验时整个系统的强烈振动和盘阀旋转时受到的水流冲击力的变化造成了扭矩波动,最终导致了上盘阀驱动扭矩的波动剧烈,从而造成了这种差距。从试验的测量结果来看,如果减去空载扭矩,上盘阀的驱动扭矩均值能够降到5 N·m以下,可以满足设计方案中的技术要求。
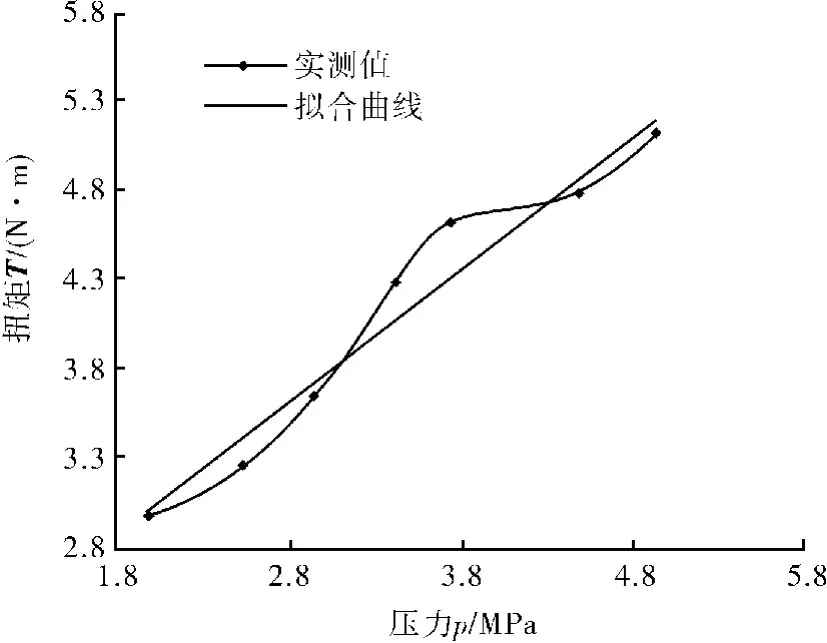
图9 压力-扭矩试验曲线
3.3 执行系统流量和活塞推力
图10是以5 MPa,转速80~90 r/min时的室内试验数据绘出的上盘阀的流量-压力试验曲线,线性拟合得到的方程[10]为

式中,p为执行系统入口压力,MPa;Q为排量,L/s。

图10 流体压力-流量试验曲线
拟合曲线的方程截距为-0.041 8 L/s。实际的情况是将流程的旁通阀门全开,使执行系统的入口排量为零,此时压力为零,二者对比来看,拟合的曲线方程还是很接近实际情况的。
图11是以5 MPa,转速80~90 r/min时的室内试验数据绘出的压力-纠斜力(最大值)试验曲线,线性拟合得到的方程为

式中,F为纠斜力(最大值),N;p为执行系统入口压力,MPa。

图11 压力-纠斜力(最大值)试验曲线
拟合曲线的方程截距是4 099.8 N。试验时,为了保证活塞能够往复运动,采用弹簧复位机构,给活塞预压了4 000 N左右的回复力,二者对比,拟合的曲线方程还是很接近实际情况的。
4 结论
1) 通过试验分析研究,得出了自动垂直钻井执行系统活塞产生的脉冲纠斜力随盘阀转角变化的规律和脉冲纠斜力的作用区域、顺序。
2) 试验得到了压力-上盘阀驱动扭矩、流量-压力、纠斜力(最大值)值拟合曲线方程,为自动垂直钻井系统现场试验提供了技术参数选择依据。
3) 试验结果表明执行系统具有良好的工作性能,能够满足整个自动垂直钻井系统的控制要求。
[1] 孙铭新,韩来聚,李作会.静态偏置推靠钻头式旋转导向钻井系统介绍[J].石油矿场机械,2003,32(3):4-7.
[2] 韩来聚,王瑞和,刘新华,等1调制式旋转导向钻井系统稳定平台控制原理及性能分析[J].石油大学学报:自然科学版,2004,28(5):40-60.
[3] 李 琪,杜春文,张绍槐1旋转导向钻井轨迹控制理论及应用技术研究[J].石油学报,2005,26(4):97-1011
[4] 闫文辉,彭 勇,张绍槐1旋转导向钻井工具的研制原理[J].石油学报,2005,26(5):94-971
[5] 闫文辉,彭 勇,施红勋1旋转导向钻井工具液压分配系统的设计[J].钻采工艺,2005,28(5):69-721
[6] 李军强,武学尧,彭 勇,等1调制式旋转导向钻井钻井工具控制阀力学模型及仿真分析[J].天然气工业, 2005,25(6):52-551
[7] 孙召红,房 军,盛利民,等1井底钻压扭矩传感器设计分析[J].石油矿场机械,2010,39(4):65-681
[8] 彭 勇,闫文辉,李健博1旋转导向钻井工具导向力优化设计[J].石油钻探技术,2006,34(2):10-141
[9] 闫文辉,彭 勇.旋转导向钻井工具导向执行机构设计[J].天然气工业,2006,26(11):70-72.
[10] 张 健,范凤英.分注井水嘴直径选择的研究与应用[J].石油矿场机械,2004,33(增刊):60-63.
Experimental Study on Execution System of Automatic Vertical Drilling System
NIE Yun-fei1,WU Zhong-hua1,SUN Hao-yu1,ZHANG Le-qi2,GENG Ying-chun1
(1.Drilling Technology Research Institute,S hengli Petroleum A dministration,Dongying257017,China; 2.Bohai No.1Drilling Company,Shengli Petroleum A dministration,Dongying257000,China)
The developed execution system is the key unit of automatic vertical drilling system.The execution system should make a quick and accurate response to the command of the controlling system for achieving the automatic vertical drilling function.The accurate operating performance parameter can not be obtained by theoretical model study,because the complicated structure of the execution system.Therefore,a lab simulated system was built and experimental study was conducted on execution system operating performance.The match lines and equations of pressure-up valve driving torque,flow rate-pressure,pressure-restoring force were experimentally studied.The operating performance of execution system meets the control demand of automatic vertical drilling system.
automatic vertical drilling;execution system;well inclination;experimental study
1001-3482(2011)05-0021-04
TE921.207
A
2010-11-10
国家高技术研究发展计划(863计划)(2009AA093501)资助
聂云飞(1975-),男,山东广饶人,工程师,硕士,2005年毕业于中国石油大学(华东)研究生院机械电子工程专业,目前从事石油钻井工具方面的研究工作,E-mail:nyfnyf2004@163.com。
