海洋平台钢悬链线立管安装监测技术研究
2011-12-11李丽玮
李丽玮,何 宁,王 辉
(1.中国石油大学机械与储运工程学院,北京102249;2.海洋石油工程股份有限公司工程技术中心,天津300452) ①
海洋平台钢悬链线立管安装监测技术研究
李丽玮1,何 宁2,王 辉2
(1.中国石油大学机械与储运工程学院,北京102249;2.海洋石油工程股份有限公司工程技术中心,天津300452)①
为在深海复杂工况下把平台立管安装到位,需对安装过程进行监测。综合考虑船舶位移、升沉补偿、立管吊装变形,以声纳和远程操作潜水器(ROV)监测系统为技术支撑,监测管线着陆区位置、悬链线形态、以及海底地形等参数,指导立管的安装过程。形成一套完善的钢悬链线立管安装监测技术,促进我国深海石油的发展。
海洋平台;立管;安装;监测
1994年,壳牌公司在墨西哥湾872m水深的张力腿平台上安装了世界上第1条钢悬链线立管,至今已经有数十条钢悬链线立管在墨西哥湾、巴西坎普斯湾、北海、挪威海、印度海和西非投入使用。钢悬链线立管集海底管线与立管于一体,一端连接井口,另一端连接浮式结构,无须海底应力连接头或是柔性接头的连接,极大降低了水下施工量和难度[1]。由于在深水环境中存在很多不确定因素,管线会受到来自自身的重力、风、波浪力、海流作用以及上部附体运动产生的载荷,从而发生疲劳破坏、扭曲等状况,如图1所示。因此要对整个立管的安装过程进行实时监测,以保证成功地安装整个立管。为了适应不同水深的需要,钢悬链线立管出现了不同的结构形式,本文以简单悬链线立管(Simple Catenary Riser)为例(如图2所示),研究钢悬链线立管(SCR)的安装监测技术。

图1 立管发生破坏与扭曲
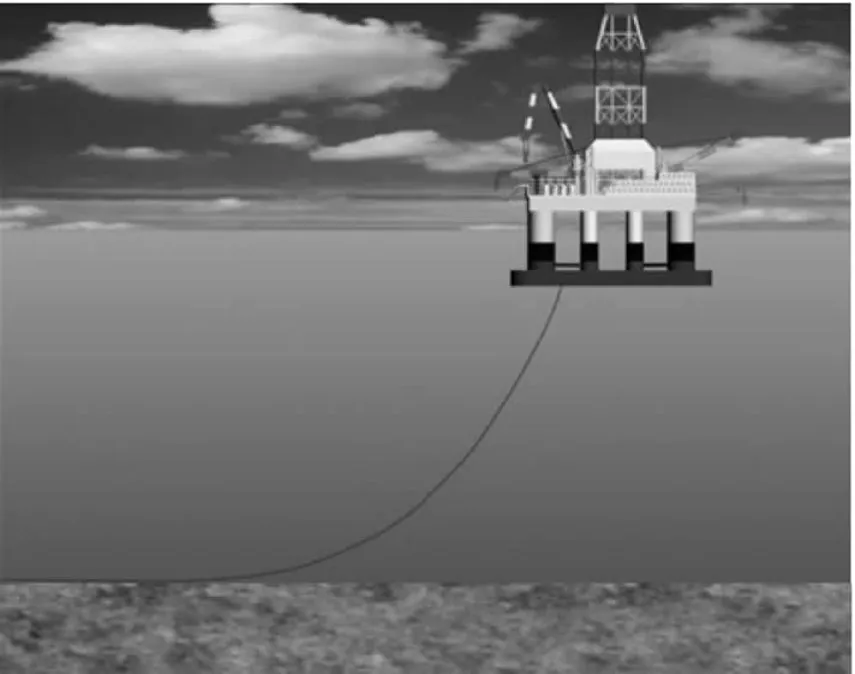
图2 钢悬链线立管
1 监测方法
立管在位时,常规的检测与监测主要是指对SCR悬挂区域应力状态、着陆点应力状态以及海流流速分布的监测[2]。主要的监测方法是在铺管前,把监测所用到的倾斜计、应变测量仪、加速度计以及海洋环境测量仪器等监测设备安装固定在工程船以及管线上,监测数据通过连接电缆传送到平台上的总控制室中,监测人员根据不同情况下立管的响应对立管形态做出评估。立管安装监测存在的技术难题是:立管形态及着陆点位置会随着安装过程的进行发生不断的变化,给实时精确监测带来一定难度。由于管线在深水环境中受多重因素影响,安装过程中更会发生多种复杂的响应。
本文从3个方面介绍立管的安装监测过程,即海洋环境,船舶的运动与位置,立管的铺设与吊装。立管铺设过程需要监测管道在托管架处受力、立管着陆点位置以及悬链线的形态与位置,立管吊装过程同样也需要监测立管着陆点以及悬链线的形态与位置。根据以上的简单叙述,遵循以下思路对立管实时监测,即采用DP系统以及声纳监测系统,对一系列对象实施监测,实时获得船舶运动情况与位置、着陆区位置、悬链线形态、海底地形等重要参数,并进一步分析悬链线三维模型,就此实时模型与预先规定的理论数据进行对比,进而完善模型,及时调整安装过程,避免不必要的损失。
2 监测对象
沿着陆点(TDP)的应力分布复杂,更大程度上依赖于土壤性能和立管——海床相互作用[3]。准确确定立管应力集中的立管着陆点位置很困难,该位置随着船舶位置、立管沟和洋流的改变而改变。船舶位置不仅依赖于选定的位置,还由环境条件(例如,波浪、洋流和风速)决定。因此极端事件,例如风暴或高洋流中TDP的位置可能与其他位置明显不同[3]。
2.1 海洋环境
立管安装须进行海洋环境的监测,例如风、浪、流等情况,避免在恶劣的天气下进行管线铺设,最大限度地保证管线铺设过程中的成功。环境参数包括风速、波速、流速及他们的方向,以及海床的情况。
对于海洋环境监测,在立管安装之前把一系列的海洋环境监测系统(如图3)安装完毕,安装过程中,海洋环境监测系统将监测到的风速、风向、温度、空气湿度、海流速度和方向、海水温度、表层流等环境参数不断地传输到铺管船上的总控制室,并分析处理这些数据,工作人员根据获得的有效环境信息对立管安装过程做出准确及时评估,确保立管顺利安装。

图3 海洋环境监测系统界面
2.2 船舶
深水管线安装需要使用具有动态定位功能的安装船,其定位系统使用了一个高精度的GPS内部位置传感器,可以用来监测整个船舶的横摇、纵摇、垂荡以及3个方向的转角,从而绘制出船舶高精度的3D位置图形。动态定位系统(DP)(如图4)结合了船舶位置、铺设装备参数、立管的特性以及海底铺设轨道地形等数据,由于海上常有不可预测的海况发生,因此必须加强对动态系统的监测,以便在船体位移发生变化、不利于铺管时能及时调整铺管过程。

图4 动态定位系统
2.3 着陆点与悬链线
立管的铺设与吊装过程中,由于管线与海床的接触,在着陆点(TDP)处很容易发生疲劳、扭曲、碰撞等情况[2],因此必须对立管TDP处的形态与位置加以监测。并且由于在安装过程中,TDP的位置是时刻变化的,所以增加了TDP载荷监测的难度。同时,为了保证立管按照严格预定的位置铺设与安装,并且不对管道过载加压进而损坏管道[2],还应时刻监测悬链线的形态与位置。TDP与悬链线形态与位置的监测由远程操作潜水器(ROV)和海底铺管声纳监测系统(PLS)共同完成。TDP处主要监测立管的位移、张紧力以及与海床的接触等情况。因此当强大的流动突然发生时安装船能够具备快速的反应能力,及时对安装操作情况做出修正,以确保立管顺利铺设与吊装。图5表示的是立管的TDP及悬链线形态。

图5 TDP与悬链线形态
2.4 托管架
在立管铺设过程中应重视对托管架的监测,主要是监测管线在托管架上的应变及偏离角,如图6所示。在S型铺管过程中,管道的焊接和焊缝检测是在铺管船上以水平方式进行的,之后通过张紧器到达船尾的托管架,由于受到自身管线的重力作用,管线在铺设过程中会形成一定的弧度。管道从铺管船到海床的整体形态成悬链线状[4]。
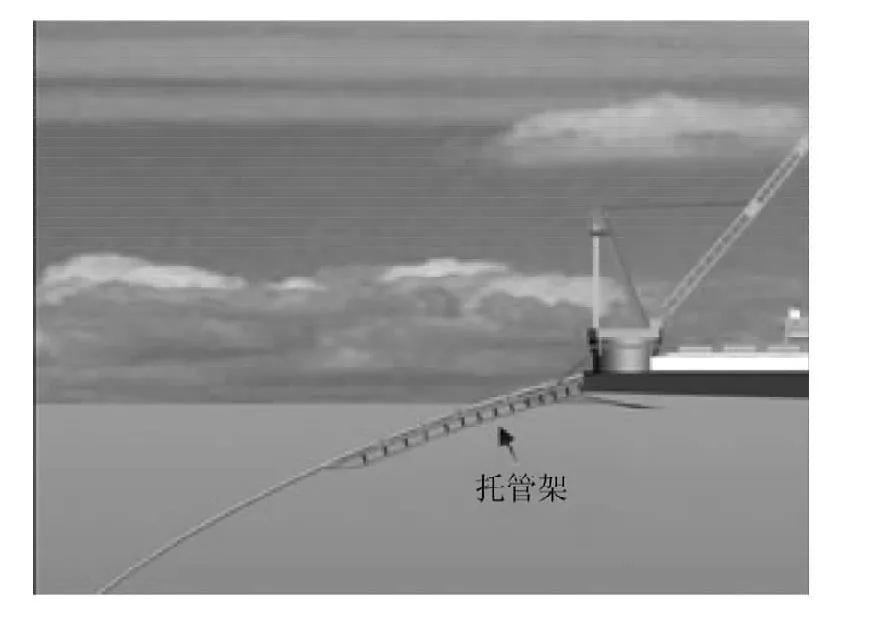
图6 S型铺管船托管架
3 安装监测实施办法
采用DP系统以及声纳监测系统,对一系列对象实施监测,实时获得船舶运动与位置、着陆区位置、悬链线形态、海底地形等重要参数,并进一步分析获得安装船以及悬链线的三维模型,就此实时模型与预先规定的理论数据进行对比,进而完善模型,调整安装过程,避免不必要的损失。另外,在遇到突发情况时,该监测系统显得尤为重要。
在立管安装过程中采用2个ROV协助工作,其中1个ROV对安装过程中时刻变化的TDP和海底地形进行实时监测,ROV由辅助船协助操作。另外1个ROV作为铺管声纳监测系统(PLS)(如图7)的承载平台,由1根脐带缆连接到安装船上,构成声纳ROV监测系统(如图8)对立管安装过程中悬链线形态、TDP进行实时监测。
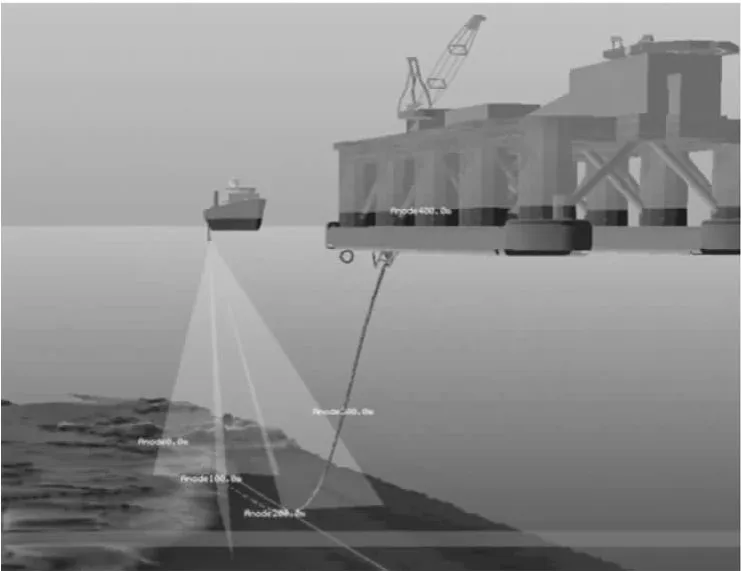
图7 铺管声纳监测系统

图8 声纳ROV监测系统
3.1 立管铺设监测
ROV对管道进行监测时,船舶上显示监测结果,工作人员据此及时了解海底管道的情况。图9为立管铺设过程中的监测示意图。
立管铺设与吊装过程中,声纳ROV监测系统实时监测铺管船与海床之间的立管的形态、海底地形以及着陆区情况,如图10所示。安装过程开始时,安装在铺管船下方ROV平台上的电波扫描声纳传感器开始监测船舶与海床之间的管道;声纳传感器装置的发射单元发射声信号,检测从立管反应得到的信号;声纳传感器装置的接受单元处理反馈信号并通过脐带光缆传输信号到操作平台,获得立管的三维模型,从而检查悬链线的形态是否出现异常,并且确定立管着陆区的位置[5]。
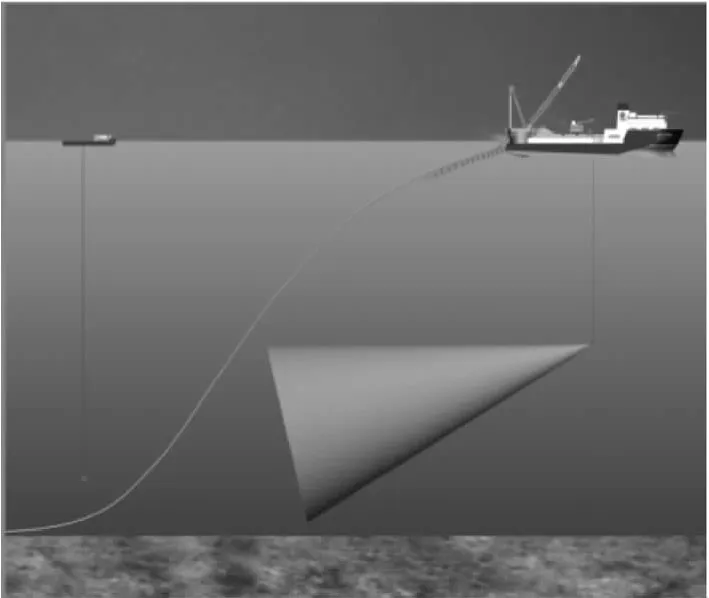
图9 立管铺设监测

图10 海底画面
3.2 立管吊装监测
铺管过程结束后,安装船吊装立管到平台,图11为立管吊装过程中的监测,表示工作ROV(如图12)与声纳ROV监测系统共同监测立管。声纳系统通过独特的声波操控功能向管道悬链线多重目标同时发射信号脉冲,获得船体运动与位置、TDP的形态与位置以及悬链线的位置等数据,这些数字化的目标信息不停地反馈到数据库中,通过比较提炼到一个实时的三维模型中,因此得到一个随着管道铺设操作进程不断实时校正的“着陆点”,着陆点不断实时地根据管道铺设操作进程进行校正。
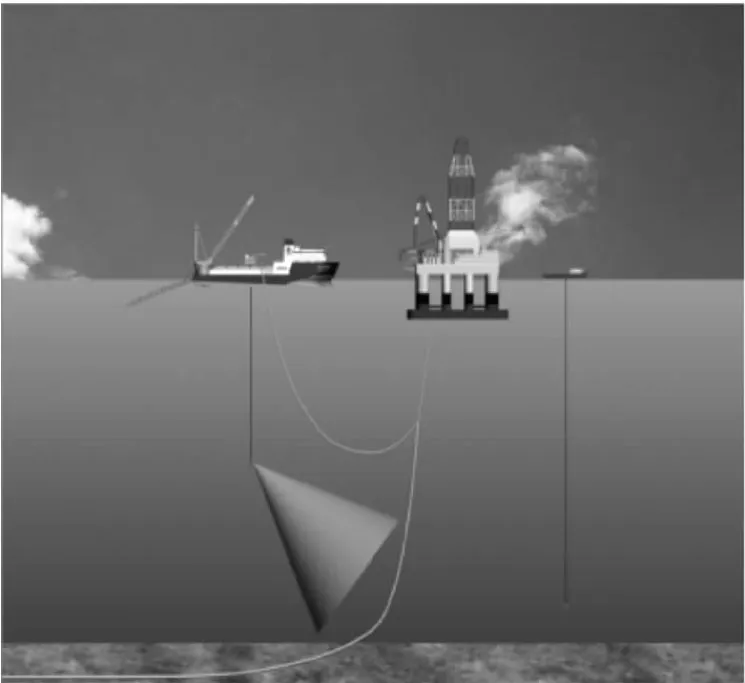
图11 立管吊装监测

图12 工作ROV
4 结论
1) 通过对国内外监测技术的研究,结合环境、船舶运动、立管铺设与吊装3方面因素,提出了钢悬链线立管安装时的监测技术,能有效地控制各种随机因素,保证立管安装过程的顺利进行。
2) 立管监测技术是基于立管在位时的静态监测,安装过程实时监测技术并未成熟。本文首次提出了声纳ROV监测技术,在立管铺设与吊装过程中实时监测悬链线形态、TDP位置、海底地形等安装参数。
3) 实时监测技术对安装过程中立管所受的应力与应变的监测存在一定的局限性。
4) 钢悬链线立管逐渐成为深海石油平台立管发展的主趋势,声纳ROV监测技术对解决钢悬链线立管安装过程中的技术难题起到一定帮助。
5) 本文所做研究未与试验相结合,对安装过程中立管自身强度的研究相对保守。
[1] 王 毅,段梦兰,李丽娜,等.深水立管安装技术进展[J].石油矿场机械,2009,38(6):5-8.
[2] Roderick Y E,Scientific M S,Craig R C,et al.Load Monitoring at the Touchdown Point of the First Steel Catenary Riser Installed in a Deepwater Moored Semisubmersible Platform[G].Offshore Technology Conference,Houston,USA:OTC,1999.
[3] Metin Karayaka,Ph D.Steel Catenary Riser Response Characterization With on-Line Monitoring Devices[G].International Conference on Offshore Mechanics and Arctic Engineering.Honolulu,Hawaii,USA:OMAE,2009.
[4] Dominique Perinet,Acergy France,Ian Frazer,et al.Strain Criteria for Deep Water Pipe Laying Operation[G].Offshore Technology Conference.Houston,USA:OTC,2008.
[5] David A M.Subsea pipeline touchdown monitoring[G].United States,Patent Application Publication,US 2004/0013471A1.Jan.22,2004.
Monitoring Technology of Installation of Offshore Platform Steel Catenary Riser
LI Li-wei1,HE Ning2,WANG Hui2
(1.College of Mechanical and Transportation Engineering,China University of Petroleum,Beijing102249,China;2.Engineering Technology Center,COOEC,Tianjin300452,China)
On the basis of complex natural environment,this paper researchs vessel motion,heave compensation of ship location and riser shape while laying and lifting.With the main ponit-ROV sonar monitoring system,study around touch down point of pipeline,steel catenary riser shapes and seabed topography were made.And then these paraments to guide analysis of riser installation process was used.Finally complete monitoring technologies for steel catenary riser installation was formed,to provide technical support for the development of offshore oil and innovation of monitoring technology for riser installation in China.
offshore platform;riser;installation;monitor
1001-3482(2011)08-0019-05
TE95
A
2011-02-23
国家高技术研究发展计划(863计划)“深水海底管道铺设技术”(2006AA09A105)
李丽玮(1986-),女,河北衡水人,硕士研究生,主要从事安全检测与监测、海洋立管方面的研究,E-mail:weiweidaolai1986@126.com。
