美国的空间交会对接技术
2011-12-07□博引
□ 博 引
为了给“阿波罗”登月计划作技术准备,美国研制和发射了“双子星座”系列两舱式飞船,用于突破和掌握太空行走和空间交会对接技术。1966年3月,美国“双子星座”8号飞船与由“阿金纳”火箭末级改装的目标航天器实现了世界上首次交会对接。1969年7月,美国“阿波罗”指令舱与登月舱实现了首次月球轨道人控交会对接。进入20世纪80年代,美国投入巨大的人力、物力,研究开发出世界上第一架航天飞机,为了建造国际空间站,航天飞机在20世纪90年代安装了交会对接装置,并分别与“和平”号空间站和国际空间站多次对接,大大扩大了航天飞机的用途。
世界首次空间交会对接
1966年3月16日,在航天员手控操作下,美国“双子星座”8号飞船与“阿金纳”目标航天器完成了世界首次空间交会对接。其交会测量系统采用微波雷达、电视摄像机,目标航天器上还装有应答机。对接操作采用自动、手动两种方式,此后,“双子星座”,又成功进行了3次空间交会对接。
“阿波罗”飞船的交会对接
“阿波罗”登月飞船往返月球一次,需在空间进行两次交会对接。第一次是指令舱在地球轨道分离后调头180°,指令舱与登月舱对接;第二次是登月舱由月球返回时与月球轨道上的指令舱对接。
在“阿波罗”飞船的登月过程中,为了保证在缺少地面支持的月球轨道上交会对接的安全性,其指令舱和登月舱都可作为追踪航天器,都具备一定的自动化能力。通常,交会对接任务规划由地面完成,但是船上系统具有对目标定位并自主机动的能力。最终的捕获和对接则是由航天员完成的。
其交会测量系统采用X频段交会雷达,最终采用手动完成。其对接机构采用可移开的“杆-锥”式结构。
1969年7月~1972年12月,美国先后发射了“阿波罗”11号~17号共7艘登月飞船,除“阿波罗”13号发生意外事故中止登月任务外,其余6次完全成功。这说明“阿波罗”飞船使用的交会对接技术是可靠的,且适合多次使用。
“天空实验室”的交会对接
1973年5月,美国发射了第一座试验性空间站——“天空实验室”,它装有新研制的“多用途对接舱”,能同时提供2个对接口,其交会测量系统和对接机构基本与“阿波罗”飞船所用的相同。
航天飞机的交会对接
航天飞机交会对接测量系统沿用“阿波罗”的成熟硬件,成功多次跟踪、捕获失控或出故障的卫星,然后将其带回地面维修或在轨维修,最终重新发射入轨恢复工作。1995~1998年,航天飞机成功与俄罗斯“和平”号空间站进行9次交会对接;1998年~2011年,航天飞机成功与国际空间站进行37次交会对接,没有1次失败,这充分显示了美国航天飞机的交会对接技术十分先进和可靠。
航天飞机的交会对接有许多新的特点。它采用了对接机构、机械臂、航天员舱外活动等不同方式实现对目标的捕获,大大增强了其轨道服务功能。航天飞机的任务规划仍然由地面完成,机上制导、导航与控制系统根据航天员指令可以自动执行许多交会控制功能,包括目标定位、相对导航和控制。最终逼近段仍然由航天员操作完成。
美国正在研制的“猎户座”新一代飞船对交会对接的自动性和自主性提出了更高要求。目前在研发的关键技术包括自动交会制导、导航与控制算法、自主任务管理、自动相对导航敏感器技术、先进捕获和对接机构、机械臂组装技术。这些技术中许多已经成熟,关键的挑战是要将这些技术进行集成。
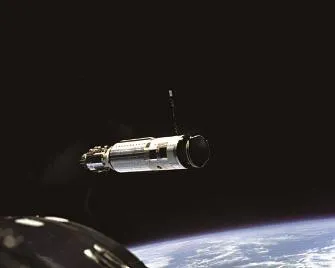
“双子星座”飞船与“阿金纳”火箭交会
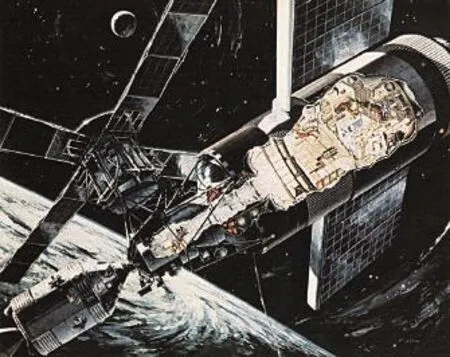
“阿波罗”号飞船与“天空实验室”对接

美国航天飞机与俄罗斯“和平”号空间站对接
测量系统
“双子星座”飞船上使用的交会雷达是L频段相干脉冲微波雷达,它包括4副天线:1副圆柱形天线用于发射脉冲信号,2副可转动的螺旋形天线用于接收目标信号,最后1副天线作为2副可转动天线的参照物。其作用范围为150米~450千米,可以测出目标航天器的方位角、仰角和距离与距离速率。在目标航天器上安装应答机,航天员根据交会雷达在仪表盘上显示值和通过光学瞄准器目视结果,以手动方式进行交会对接操作。
“阿波罗”飞船在进行登月舱和指令舱交会对接时,使用的交会雷达是X频段单脉冲比幅连续波雷达,它能测量登月舱相对于在150千米月球轨道上的指令舱的距离、距离变化率、角度和角度变化率。交会雷达和应答机都用固态变容二极管倍频器作发射机,收发都用连续波方式。航天员通过光学瞄准镜以手动方式进行交会对接操作。
美国航天飞机上使用的交会雷达是Ku频段多功能雷达,它还具有通信和导航功能,该雷达利用脉冲往返时间测量距离,利用载波多普勒频移测量速度,利用单脉冲比幅测量角度,系统采用合作应答方式,作用距离为30米~550千米。在逼近阶段再辅以激光测距仪、摄像机等光电设备,并由航天员根据显示屏的显示结果和光学瞄准器操纵航天器实现对接。
航天飞机与俄罗斯“和平”号空间站的交会时,航天飞机是追踪航天器,空间站是目标航天器。轨道高度为370千米~400千米、倾角51.6°。在它们相距180千米时,采用甚高频无线电设备进行联系;在65千米~33米时采用交会雷达进行测量,航天飞机的交会雷达到目标航天器的使用限制距离为33米,距离再近对雷达来说是盲区。在对接前,即在距目标器800米时改为航天员手动操作。在33米以内时采用激光测距仪和光学摄像机进行测量,拍摄2个航天器的相对姿态和位置。
国际空间站的交会测量系统包括GPS导航接收系统、中继卫星导航与通信接收系统、微波交会雷达系统、激光对接雷达系统、光学对接摄像系统等。此外还包括航天员显示装置(空间六分仪、望远镜、显示器、荧光屏等)。
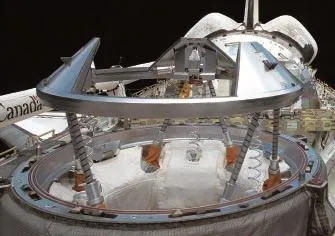
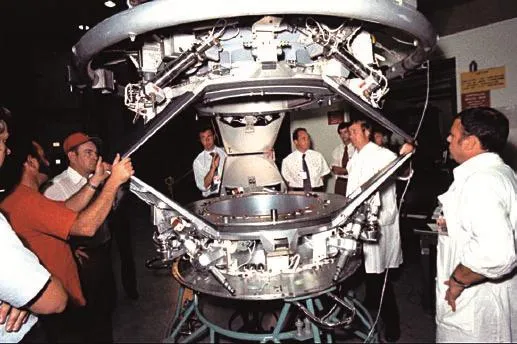
航天飞机上的“异体同构周边”式对接机构
对接机构
美国“双子星座”飞船采用“环-锥”式对接机构,尺寸和质量均较大。它由一个捕获环构件和一个对接锥结构组成。捕获环(被动部件)装在“双子星座”号飞船的通道口上,“阿金纳”火箭尾部装一个大型的对接锥(主动部件)。对接采用自动和手动两种操作,对接后自然形成航天员通行通道。
“阿波罗”飞船采用“杆-锥”式对接机构,结构简单、重量轻,其主动部件装在指令舱上,被动部件安装在登月舱上。对接中产生的撞击由弹簧和气液缓冲装置进行缓冲和阻尼。对接时需要航天员花费较多时间、消耗很大体力通过手动实现对接。这种对接机构还用于“天空实验室”。
1975年美国“阿波罗”18号飞船与苏联“联盟”19号飞船对接时首先使用了“异体同构周边”式对接机构。1995年航天飞机与俄罗斯“和平”号空间站首次对接,采用了改进的“异体同构周边”式,把导向器由外翻式改为内翻式,由此可以提高对接刚度和密封性,更适用于大型的航天器。美国航天器对接时都采用手动。
“异体同构”是指追踪航天器和目标航天器上的对接机构构造是一致的(杆-锥式对接机构是不一致的),没有主动、被动之分。“周边”是指机构不设置在中间,而是设置在周边(杆-锥式是设置在中间),全部对接机构设置在航天器壳体外侧。“异体同构周边”式对接机构的优点是机构不占用航天器内部空间,对接后通道畅通,对接连接环直径较大,承载能力大,适宜大质量航天器间对接。其缺点是结构比较复杂,质量较大。对接时,追踪航天器上的对接机构伸出,安装在周边的3个板状导向器完成导向作用,使两个对接机构准确地接触,其上的锁锁定,对接机构回缩,将对接面拉紧,对接面上的锁将对接面锁定,完成对接。
试验美苏飞船对接用的“异体同构周边”式对接机构

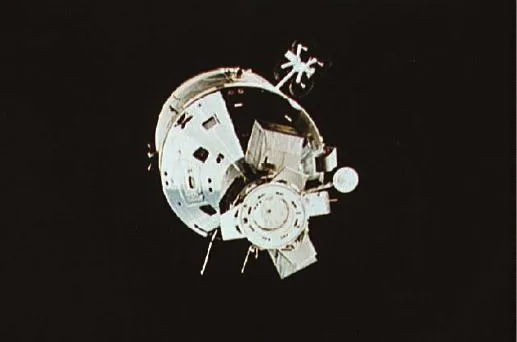
航天飞机与国际空间站对接(同时还对接有俄罗斯和欧洲的飞船)
仿真设备
美国自20世纪60年代初开始研制交会对接仿真设备,先后开发了4种,其中技术最先进的是航天飞机与空间站实时停靠和全自主交会对接仿真器。
“双子星座”飞船交会对接仿真器是通过闭路电视产生目标航天器的计算机动画图像模型的仿真器,共有9个自由度,其中追踪航天器(“双子星座”飞船)3个自由度,目标航天器(“阿金钠”火箭)6自由度(三维位置和三轴姿态角),仿真距离为0~300米。
“阿波罗”飞船交会对接仿真器是一种混合式交会对接仿真器,有6个自由度,其中追踪航天器上配置的锥型对接机构为2自由度,配置在目标航天器上的锥型对接机构为4自由度。通过液压驱动,这种仿真器可对全尺寸对接机构进行动力学仿真。可验证对接机构以及该机构的手爪在各种条件下张开、闭合、锁紧功能。
航天飞机实时停靠仿真器是12自由度的交会对接仿真器,其中追踪航天器为6自由度,目标航天器为6自由度,采用“阿波罗”18号和“联盟”19号飞船进行交会对接仿真试验时所使用的对接动力学仿真设备,所能承受的最大冲击力为1350千克。美国用它对手动和自动对接方式进行了大量的仿真试验,对航天员熟悉与掌握交会对接停靠技术发挥了重要作用。
全自主交会对接仿真器用于满足交会对接在安全、容错、可靠性等方面的要求,将新老技术融为一体,以半物理仿真为核心,完成从最终逼近到对接阶段的各种试验。全自主交会对接仿真器用气浮台(3自由度)和台子上的移动台车(3自由度)以无线传输方式发射和接收遥操作所需的各种信息,并利用机器人臂模拟目标航天器运动,完成从40千米到实现对接的全过程仿真。由于采用GPS接收机、光学敏感器、动态目标仿真器等,因此使用中即使在系统出现故障的情况下,仍可完成安全停靠、交会对接的仿真。该仿真器系统不仅能验证GPS、交会雷达等新型敏感器以及自主任务规划算法等新技术,还能连续地监视人在回路中的操作控制技术。
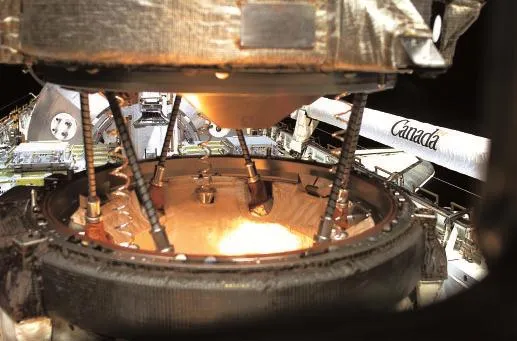
美国“团结”号节点舱1号与航天飞机对接机构实现对接
“阿波罗”18号飞船前部安装的“异体同构周边”式对接机构
对接故障
在航天飞机使用以前,美国只发生过2次交会对接故障:
1966年6月3日,美国发射了“双子星座”9号载人飞船。该飞船在与由“阿金纳”火箭第3级改装的目标飞行器进行交会对接时,由于“阿金纳”弹射罩出现故障,使“阿金纳”成半开状态,所以对接无法进行。飞船上的航天员斯坦福尔德和塞尔南打算出舱修理,但又因舱外航天服的环控生保系统不能散热,头盔面罩内布满雾气,无法看清东西,所以没有获得成功,对接失败。“双子星座”9号于6日返回地面。
“阿波罗”14号飞往月球的过程中,在指令舱与登月舱对接时,由于对接机构出现故障,因而多次对接失败,直到第6次试接后才获得成功,使得正常情况下只需25分钟的对接花了近2小时。为了避免同样的故障再次发生,后来的航天器上都采取了改进措施,包括在发射前对容易出问题的对接机构进行密封保护、改进对接锁定装置和增加模拟测试。
经验借鉴
美国航天器在交会时采用多种测量敏感器:远距离用交会雷达自动进行,近距离采用激光测距仪和摄像机等,而且有航天员参与,从而保证交会对接任务能够顺利执行。这样既比较安全可靠,又能保证足够精度,且可实现软对接。由于在最终逼近阶段需航天员采用手动实现交会对接,所以航天员要在地面上进行多次操作培训仿真试验,有时需要作几百或上千小时操作仿真实验。
美国航天器在空间交会对接时采用远距离自动、近距离手控的方式,是从实际的技术把握性、安全可靠性和成本经济性等方面全面考虑的。近距离一般指0.5千米~1千米之间,手动操作主要是控制相对距离和相对靠近速度,而相对姿态还可以实现自动控制。
美国交会对接飞行程序和操作方案能适应多种客观条件和状态改变的需要,例如发射时间推迟、追踪器入轨状态改变、设备故障等。
“异体同构周边”式对接机构的3个导向器外翻,允许捕获姿态偏差范围可以大一些;导向器内翻的好处是直径特别大,通常直径在3米~4米以上,可以提高对接刚度,增强对接圈和密封的强度,但要求提高终端姿态控制精度。

将“异体同构周边”式对接机构安装到航天飞机上