苏联/俄罗斯的空间交会对接技术
2011-12-07边广龙
□ 边广龙
目前,在世界空间交会对接技术领域处于领先地位的是俄罗斯和美国。苏联/俄罗斯是世界上进行航天器空间交会对接最多的国家,其对接形式也多种多样,有无人飞船与无人飞船的对接,有载人飞船、 无人飞船与空间站的对接,以及空间站模块舱间的交会对接和组装等。苏联/俄罗斯在航天器的空间交会对接中积累了丰富的成功经验,也有不少失败的教训,很值得借鉴。
首次自动对接
1967年10月30日,苏联先后发射了两艘不载人的“联盟”号飞船——“宇宙”186、188,成功进行了世界上第一次无人航天器自动交会对接。其中宇宙186为追踪航天器,“宇宙”188为目标航天器。它们采用“针”模拟测量系统和无通道的“杆-锥”对接机构。
1967年10月27日,具有空间机动能力的宇宙-186率先上天,“宇宙”188于10月30日被直接发射到距“宇宙”186相差24千米的轨道上。此后,先通过地面站的导引指令,“宇宙”186利用主发动机进行交会机动,并用姿态控制推力器进行轨道调整,“宇宙”188也同时用姿态控制推力器保持与“宇宙”186的相对指向,这一过程历时30分钟。接着,2艘飞船启动“针”模拟测量系统,用雷达和计算机系统测量彼此之间的相对距离、相对速度、相对角速度、相对方位角,并逐渐接近,当相对距离为350米、接近速度降到每秒2米时,进入最终逼近阶段。在最终逼近阶段,“宇宙”188利用姿态控制推力器保持与“宇宙”186同轴,“宇宙”186伸出可伸缩的对接探杆,插到“宇宙”188的接纳锥中。伸缩杆的头部与接纳锥一接触,开始对接合拢。在对接合拢阶段,作为追踪航天器的“宇宙”186缩回探杆,将2艘飞船拉紧,对接面上的锁把2个对接面锁定,对接环上的挂钩使2艘飞船保持20万千克的接触压力,完成对接,实现气密耦合。然后2艘飞船完成电联接,进行通信。至此,完成交会对接的全过程。它们对接了3.5小时后开始分离操作:先是脱开探杆与对接环的挂钩,然后对接环上的弹簧把2艘飞船弹开。“宇宙”186、188先后于1967年10月31日、11月2日着陆。
至今,苏联/俄罗斯的“联盟”系列载人飞船和“进步”系列货运飞船已成功进行了上百次的自动对接,它表明,其自动对接技术是可靠和先进的。
首次手动对接
在载人手动对接技术方面,美国率先于1966年3月完成了世界上第1次载人手动交会对接,此后一直保持领先。不过,苏联/俄罗斯也比较重视这一技术,目的是在自动对接失败时采用手动对接来完成任务。
1969年1月16日,“联盟”4、5载人飞船成功进行了苏联载人航天器的首次空间交会对接。它们仍采用“针”模拟测量系统和无通道的“杆-锥”对接机构。
1969年1月14日,载1人的“联盟”4飞船升空,载3人的“联盟”5飞船于1月15发射,后者飞行5圈后接近联盟4。1月16日,通过地面导引使这2艘飞船在轨道上交会。当它们相距几十千米时,启动“针”模拟测量系统的交会雷达来测量相对距离和速度,实现自动寻的,从而彼此接近并调整姿态。当“联盟”4、5相距100米以内时进入最终逼近阶段,作为目标航天器的“联盟”5通过姿态敏感器和陀螺测量其姿态进行自动控制,作为追踪航天器的“联盟”4飞船上的航天员沙塔洛夫借助电视摄像机和光学瞄准器通过手动控制完成与“联盟”5飞船的对接合拢。对接后,沙塔洛夫先用手动方式为“联盟”4、5定向,使飞船太阳电池翼对太阳定向,然后2艘飞船上的航天员检查对接系统的通信线路,接着,航天员通过太空行走互相转移到对方的飞船。最后,“联盟”4、5分离。1969年1月17日,“联盟”4载3人着陆,1月18日“联盟”-5载1名航天员着陆。

“联盟”4、5在轨对接后,航天员通过出舱转移到对方飞船内

“联盟”系列飞船与空间站对接

“联盟”TM17与“和平”号空间站交会
与空间站对接
1971 年4 月19 日,苏联发射了世界上第一座空间站——“礼炮”1。其上的对接机构改为可移开的“杆-锥”式对接机构,即通过传动机构把堵塞在通道内的锥形体等装置自动移放在通道旁侧,实现了对接后的密封连接并形成航天员来往通道。该对接机构需要一定的相对速度才能完成对接锁定,先后用于苏联/俄罗斯各类飞船与各类空间站的对接。不过,从1986年苏联/俄罗斯发射“联盟”TM载人飞船和“进步”M货运飞船与“和平”号空间站交会对接起,开始用较先进的“航向”数字测量系统取代了“针”模拟测量系统,其优点是系统简单,从距离几十千米的自主段起始点开始,到对接机构接触的全程均由该系统完成相对位置和姿态的测量。因早期的进步号系列货运飞船使用“针”模拟测量系统,所以“和平”号上同时安装了“航向”和“针”测量系统。“航向”数字测量系统一直沿用至今。
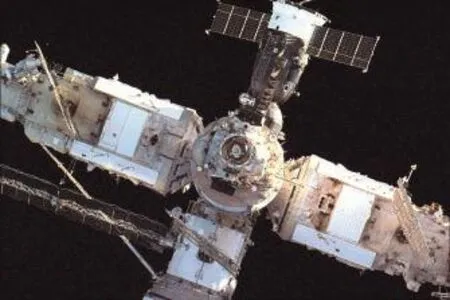
1986 年2 月20 日,苏联发射了“和平”号空间站核心舱,共配置了6个对接口。在其后的空间站组装建造过程中共对接了5个实验舱,交会对接仍然在水平轴向进行,对接后通过机械臂将空间站舱段或飞船移动到侧向对接口。飞船与“和平”号的交会对接仍然有人控和自控两种方式,对于无人的“进步”号飞船,人控由“和平”号上的航天员或地面控制人员进行操作。
“联盟”TM飞船在与“和平”号空间站对接时,“航向”系统在距空间站400千米处开始工作,空间站自动调整姿态使其大体朝着视线方向,飞船上的雷达从200千米开始导引飞船自动对准空间站;到80千米处时,“航向”系统的信息仅指示状态;从距空间站37千米开始,这一系统引入精确制导、导航和控制计算机。
测量系统
苏联/俄罗斯先后发展了2代用于空间交会的测量系统。早期使用“针”模拟测量系统。它采用视线运动平行控制,主要用交会雷达测量相对距离和速度;测量系统简单,易于实现。
1986年,苏联/俄罗斯用“航向”数字测量系统取代了“针”模拟测量系统,使作用距离增大,并允许飞船从任意方向与空间站对接。“航向”系统的主要改进是增加了数字计算机,航天员也可借助显示器和键盘进行手动控制。
俄罗斯曾研制了有人介入的“远程对接控制器”自动交会测量系统,但在1997年4月“进步”M33货运飞船与“和平”号空间站进行交会对接时,“远程对接控制器”出现了故障;之后的“进步”M34再次使用该系统时又发生了碰撞故障。所以,从“进步”M35开始,又改用原来的“航向”系统,而没有再用“远程对接控制器”系统。
“航向”属于S频段微波交会雷达测量系统,其距离测量采用载波调幅相位法,径向速度测量采用连续波多普勒测速。“联盟”TM飞船上装有微波交会雷达系统,包括自动导引头、测距仪和径向速度测量装置;空间站上装有信标、应答机和通信设备以及相应的搜索、捕获定向敏感器。
“航向”系统共有9部天线组成搜索捕获和跟踪测量系统,追踪航天器上有5部,目标航天器上有4部。其中6部天线用于搜索捕获和初定向,余下的3部中有1部用于停靠阶段定向,另2部用于相互跟踪、相对运动测量和停靠阶段定向。用于搜索的天线为螺盘天线,用于跟踪的为抛物面天线。

1975年,苏联“联盟”19飞船与美国“阿波罗”18交会对接

俄罗斯舱段对接到国际空间站上后对接机构已经没有用处,又由于“杆-锥”式对接机构占用舱门附近通道,所以需要拆除它们

“礼炮”1与“联盟”11对接示意图
对接机构
苏联/俄罗斯航天器的对接机构以实用、易操作、高可靠为根本,经历了由简单到复杂的几个阶段。
最初采用没有密封通道的“杆-锥”式对接机构航天员必须出舱才能进入另1艘飞船。从1971年“联盟”11飞船与“礼炮”1空间站对接起,苏联/俄罗斯采用了可移开的杆锥式对接机构,增加了缓冲器系统。最具创新的改进是,它把对接框上的所有对接元件(除密封圈外)都做成同样的形式,这也是后来的异体同构周边式对接机构的雏形。它通过传动机构把堵塞在通道内的锥形体等装置自动移放在通道旁侧,实现了对接后的密封连接并形成航天员来往的密封通道。
1975年,苏联“联盟”19飞船与美国“阿波罗”18飞船进行了空间交会对接。它们采用新研制的“异体同构周边”式对接机构,使2个拟在太空对接的航天器既可作主动方,也能作被动方。另外的改进是,对接机构为周边的,即所有定向和动力部件都置于舱口的四周,以保证中央自然形成密封的来往通道。
苏联/俄罗斯“联盟”系列载人飞船、“进步”系列货运飞船及其空间站舱段大多采用“杆-锥”式对接机构。其优点是结构简单,质量较轻;缺点是对接机构全部安装在航天器壳体内部,对接后占据较大内部空间,其承载能力也比较低。
对接故障
至今,苏联/俄罗斯已发射了上百艘宇宙飞船,发生了10多次故障。
l969年10月12日、l3日,苏联先后发射了“联盟”7、8飞船。10月15日,“联盟”8逼近“联盟”7,两者相距500米,由于飞船的姿态控制系统出现故障,使它们进行了多次机动飞行也没能实现对接。
1971年4月23日,“联盟”10飞船升空,4月25日实现与“礼炮”1空间站对接,但由于打不开空间站的舱门,使飞船上的航天员无法进入空间站,结果“联盟”10只能载着航天员与空间站分离返回地面。
1974年8月26日,“联盟”15飞船升空,当它与“礼炮”3空间站相距30~50米时,由于飞船制动过快,所以无法实现自动对接,又因“联盟”15采用蓄电池供电,飞行时间不能超过2.5天,所以手动对接也没成功,结果飞船只能返回。
1976年10月14日,“联盟”23飞船升空,当它与“礼炮”5空间站相距不到100米时,自动交会对接系统发生故障,又由于参加此次飞行的2名航天员都没有进行过手动对接训练,结果对接失败。
1977年10月9日,“联盟”25飞船升空,当它与“礼炮”6空间站对接时,由于飞船对接机构出现故障,导致对接失败。
1979年4月10日,“联盟”33飞船升空,它与“礼炮”6空间站交会后,由于飞船主发动机出现故障,结果无法对接。
1983年4月20日,“联盟”T8飞船升空,准备与“礼炮”7空间站对接。由于在发射过程中整流罩与飞船分离时将飞船的交会对接雷达天线扯掉,结果无法交会对接。
1987年3月31日,“量子”1舱升空,准备与“和平”号空间站核心舱对接。在距“和平”号200米时,它不能追踪到“和平”号的雷达信号,为此,进行了第2次尝试。当“量子”1舱与核心舱相距20厘米时,2个舱无法再接近。最后,空间站上的航天员出舱发现对接面粘连了一块异物,航天员费了7天时间排除了异物后才成功实现了对接。
1991年3月23日,“进步”M7飞船与“和平”号空间站进行自动对接时险些发生碰撞,原因是此前空间站上的航天员出舱活动时碰撞并弄偏了空间站上一个交会对接系统的天线。6月25日,“和平”号上的两名航天员出舱活动4小时58分,更换了出故障的雷达天线。
1994年8月25日,“进步”M24飞船升空。由于判定对接角不正确和自动交会对接系统雷达出现故障,飞船2次与“和平”号空间站对接失败。9月3日,航天员通过手动控制方式顺利实现对接,并通过出舱活动检查对接口。
1994年10月4日,“联盟”TM20飞船升空,当它与“和平”号空间站准备对接时,飞船姿态控制系统故障,导致飞船突然偏航,航天员放弃自动对接,通过手动控制完成了交会对接。
1997年6月24日,“进步”M34飞船脱离“和平”号空间站对接口飞离一段距离,25日,该飞船飞回来再次逼近空间站时,由于制动控制部件失灵,飞船没有及时对航天员的指令作出响应,因此直接撞到“和平”号的“晶体”舱上,使“晶体”舱受损。地面控制中心立刻控制住了“进步”M34。
2001年11月28日,由于对接口上存在异物,飞抵国际空间站的“进步”M17飞船未能与国际空间站“星辰”号服务舱对接。12月3日,国际空间站上的航天员出舱清除了异物。随后,“进步”M17与“星辰”号完成对接。
“和平”号空间站上安装的“异体同构周边”式对接机构用于与美国航天飞机对接

“进步”M34货运飞船因交会对接系统故障,撞坏“和平”号“光谱”舱和太阳能电池翼(图中红色方框所圈出的部分)

装有“航向”自动交会测量系统的“进步”系列货运飞船
近期故障
2010年6月30日,“进步”M06M飞船升空,当它在7月2日距国际空间站 2千米时,由于“航向”自动交会测量系统出现故障,使飞船与空间站之间的通信信号突然丢失,并延续长达25分钟,而且手动对接也没有成功,结果对接失败。最终,“进步”M06M不得不继续其轨道飞行并飞过了空间站。此后,专家确定了失败的原因:货运飞船上“航向”自动交会测量系统的视频转播器被激活,其信号对自身产生了干扰,导致飞船与国际空间站间正常对接指令链中断,从而触发了要求飞船中止对接的信号。7月4日,“进步”M06M再次与国际空间站交会,并与“星辰”号服务舱顺利对接。
2010年9月24日,“联盟”TMA18出现机械上的故障,导致了软件故障和错误信号,结果未能按计划离开国际空间站返航。原因是由于国际空间站迷你研究舱2上对接机构中的“舱门盖锁定”传感器出现问题,没有发出预定信号,导致连接飞船接口处的挂钩无法打开。在进行了“广泛故障诊断”后,国际空间站上的飞行工程师尤尔赦金在对接机构中安装了一条跨接电缆,模拟“舱门盖锁定”传感器,从而绕过了失效的舱门传感器。之后,莫斯科任务控制中心成功发送指令打开了舱体连接挂钩。9月25日“联盟”TMA18成功脱离国际空间站,并安全返回地面。
2010年10月30日,“进步”M08M与国际空间站“码头”号对接舱自动对接失败,飞行工程师卡列里以手动方式实现对接。对接失败的原因是由于利用高频链接标准与“码头”号对接舱联系的“航向”交会控制天线出现问题,导致航向射频对接支持系统出现故障。
苏联/俄罗斯共发射3代空间站,其间共进行上百次的交会对接,有10多次失败,但主要发生在初期阶段。针对故障原因,苏联/俄罗斯通过改进交会对接技术、建立与完善地面试验手段、增加地面仿真试验等手段,使交会对接技术的可靠性和安全性得到不断提高。