基于联合卡尔曼滤波的汽车防碰撞多传感器信息融合方法
2011-12-02孔金生张西雅崔盈慧
孔金生,张西雅,崔盈慧
(郑州大学 电气工程学院 河南 郑州 450001)
基于联合卡尔曼滤波的汽车防碰撞多传感器信息融合方法
孔金生,张西雅,崔盈慧
(郑州大学 电气工程学院 河南 郑州 450001)
车辆行驶信息感知是汽车防碰撞系统的关键技术之一,只用单一传感器对目标车辆进行测量容易产生虚警.在对联合卡尔曼滤波分析的基础上,给出了基于联合卡尔曼滤波的汽车防碰撞多传感器信息融合方法.计算机仿真结果表明,该算法可以得到较精确的融合数据,对于增强汽车防碰撞系统的安全性具有重要意义.
联合卡尔曼滤波; 汽车防碰撞; 信息融合
0 引言
国际上对汽车防碰撞系统的研究始于20世纪60年代,主要以德国、美国和日本为代表,我国起步较晚[1-2].目前的汽车防碰撞系统主要根据测距设备的不同来区分,但由于汽车防碰撞系统工作的环境恶劣,由单一传感器做出的判断容易产生虚警,为了提高对目标的识别和估计能力,需要将多传感器信息融合用在汽车防碰撞系统中.卡尔曼滤波器是Kalman在1960年提出的,由于其结构简单,易于实现等特点,使卡尔曼滤波成为多传感器信息融合系统的最基本要素.由文献[3-4]知常规卡尔曼滤波在处理多传感器信息融合时存在计算量大和故障数据相互污染等问题.文献[5]将卡尔曼和粒子结合形成卡尔曼/粒子组合滤波,降低了计算复杂度,但滤波器的估计性能一般.文献[6]应用3D雷达来获得目标的位置和速度信息,但容易产生虚警.
为了减少计算复杂度,提高滤波精度,本文基于Carlson提出的联合卡尔曼滤波算法[7],实现多传感器信息最优融合的滤波器设计,并将其应用于汽车防碰撞系统.最后给出的仿真结果表明该算法可提高系统的计算精度,减少计算复杂度,增强了汽车防碰撞的安全性.
1 联合卡尔曼滤波方法
1.1联合卡尔曼滤波原理
联合卡尔曼滤波器是一种分块估计、两步级联数据处理技术.联合滤波的基本思想是先分散处理, 再全局融合.在联合滤波中, 子系统包括外部传感器1,2,…,N,标准的卡尔曼滤波器分别对应于不同的传感器, 形成多个局部滤波器, 每个局部滤波器并行工作, 通过全局滤波器进行信息综合、顺序处理,并对所有局部输出产生的滤波结果进行信息融合, 给出全局最佳状态估计[8].在通常情况下,联合卡尔曼滤波可以大大降低计算量, 应用灵活方便,具有高水平的故障检测、隔离、重构能力.
1.2联合卡尔曼滤波算法
对于线性定常多传感器组合系统,可用离散形式X(k+1)=Φ(k)X(k)+G(k)V(k)来描述,X(k)是k时刻目标的状态向量,Φ(k)是状态转移矩阵,G(k)是过程噪声分布矩阵,过程噪声V(k)是具有零均值和正定协方差矩阵Q(k)的高斯噪声向量,且有E[V(k)VT(l)]=Q(k)δkl.
设有N个传感器对系统进行独立观测,相应有N个局部滤波器,每个局部滤波器均可独自完成滤波计算.设第i个局部滤波器的模型为:
Xi(k+1)=A(k)Xi(k)+G(k)V(k);Zi(k)=Hi(k)Xi(k)+Wi(k),

2 基于联合卡尔曼滤波的多传感器信息融合算法
2.1汽车防碰撞系统结构
汽车防碰撞系统是利用现代信息技术、传感器技术来探测车辆周围的情况,为驾驶员提供信息,防止或减小车辆与车辆,或者车辆与障碍物之间的碰撞.汽车防碰撞系统的结构如图1所示.
本文采用雷达和红外传感器来获得车辆的信息,将获得的信息分别进行预处理,再将处理后的信息送到融合中心,然后用联合卡尔曼滤波器实现信息融合.融合得到的值将与控制中心设定的安全距离进行比较.
2.2基于联合卡尔曼滤波的多传感器信息融合算法
对于本文的汽车防撞系统,局部滤波器(i=1,2)根据各自观测量进行局部最优估计,这一层是并行处理的分散估计,利用常规的集中式卡尔曼滤波器进行局部状态估计.卡尔曼滤波器可分为两个部分:时间更新方程和测量更新方程.其原理如图2所示.

图1 汽车防碰撞系统结构图Fig.1 The structure of automotive anti-collision system

图2 Kalman滤波器原理图Fig.2 The schematic diagram of Kalman filter
滤波器的时间更新方程为:

状态更新方程为:

Pi(k+1|k+1)=[I-Ki(k+1)Hi(k+1)]Pi(k+1|k),



3 仿真研究
本文以汽车防碰撞系统为例,对本文设计的联合卡尔曼滤波算法进行了计算机仿真.仿真计算采用的参数为:假设目标车辆的运动速度为3 m/s,采样周期为T=1 s.过程噪声和测量噪声分别为零均值的高斯噪声,且两者相互独立.
图3为雷达测量信号得到的速度信号和经过卡尔曼滤波得到速度信号的比较,图4为红外传感器测量信号得到的速度信号和经过卡尔曼滤波得到的速度信号的比较.由图3和图4知,相对于原始数据,经过卡尔曼滤波得到数据,噪声得到了抑制,说明了卡尔曼滤波算法的有效性.
图5为经过联合卡尔曼滤波算法后的最终融合速度.由图5可知,相比于图3和图4,噪声得到了进一步的抑制,滤波器以更快的速度收敛于目标车辆的真实速度.为了进一步说明联合卡尔曼滤波器的优越性,图6给出了卡尔曼滤波器和联合卡尔曼滤波器对初始误差协方差的影响.由图6可知,在联合卡尔曼滤波过程中,初始误差协方差明显低于卡尔曼滤波的初始误差协方差;图7为雷达和红外传感器经过卡尔曼滤波和联合卡尔曼滤波得到数据的比较.

图3 卡尔曼滤波后的雷达信号Fig.3 Radar signal processed by Kalman filter

图4 卡尔曼滤波后的红外信号Fig.4 Infrared signal processed by Kalman filter
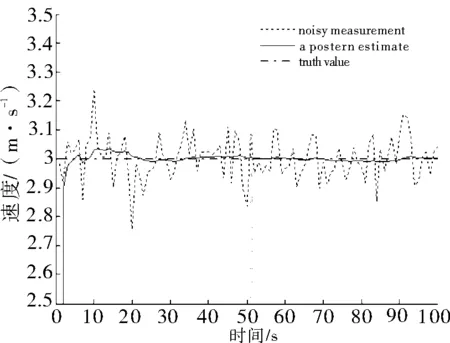
图5 联合卡尔曼滤波后的速度值Fig.5 The speed gained by federal Kalman filter

图6 初始误差协方差比较Fig.6 The contrast of initial error covariance

图7 卡尔曼滤波和联合卡尔曼滤波速度值的比较Fig.7 The contrast between the speed gained by Kalman filter and that gained by federal Kalman filter
4 结论
本文简单介绍了汽车防碰撞系统的基本结构及联合卡尔曼滤波器的基本原理,给出了基于联合卡尔曼滤波的信息融合算法,并将其应用到汽车防碰撞系统中.仿真结果表明,利用文中提出的方法可以使雷达和红外传感器到达较好的融合效果,提高了数据的准确性,从而增强了汽车防碰撞系统的安全性.
[1] 邓明哲.高速公路追尾碰撞防报警系统的研究[D].武汉:武汉理工大学,2006.
[2] 王京元,王炜,程琳.汽车主动避撞系统关键技术研究[J].交通与计算机,2004,22 (4):33-36.
[3] 周倩.车辆组合导航中卡尔曼滤波器的设计及FPGA实现[D].北京:北京交通大学,2009.
[4] 范文兵,陈达.卡尔曼滤波器在状态和参数估计中的应用[J].郑州大学学报:理学版,2002,34(4):44-47.
[5] 崔平远,郑黎方,裴福俊,等.基于卡尔曼/粒子组合滤波器的组合导航方法研究[J].系统仿真学报,2009,21(1):220-223.
[6] 王晓博,王国宏,阎红星,等.利用位置和运动信息的目标识别[J].光电与控制,2008,15(10):5-9.
[7] Carlson N A,Berarducci M P.Federated Kalman filter simulation results[J].Journal of the Institute of Navigation,1994,41(3):297-321.
[8] 崔平远,黄晓瑞.基于联合卡尔曼滤波的多传感器信息融合算法及其应用[J].电机与控制学报,2001,5(3):204-207.
Multi-sensorInformationFusionAlgorithminAutomotiveAnti-collisionSystemBasedonFederatedKalmanFilter
KONG Jin-sheng,ZHANG Xi-ya,CUI Ying-hui
(SchoolofElectricalEngineering,ZhengzhouUniversity,Zhengzhou450001,China)
The perception of vehicle running information was one of the key technologies in automotive anti-collision system.And it was easy to cause false alter when using the single sensor measured the aim vehicle.The multi-sensor information fusion algorithm based on federated Kalman filter was introduced and applied to solve the multi-sensor information fusion problem in automotive anti-collision system.The simulation results showed that the federated Kalman filter can receive accurate fusion data and enhance the safety of automotive anti-collision system.
federated Kalman filter; automotive anti-collision; information fusion
TP 274.2
A
1671-6841(2011)03-0099-04
2010-03-01
河南省创新人才杰出青年计划项目,编号084100410009.
孔金生(1963-),男,教授,博士后,主要从事复杂系统的智能控制与系统优化研究,E-mail:jskong@zzu.edu.cn;通讯作者:张西雅(1986-),女,硕士研究生,主要从事多传感器信息融合研究,E-mail:zhangxiya2007@163.com.
