大学生机械装置创新设计方法实践
2011-11-24张建国杜可可
张建国, 杜可可
(1.河南工程学院 安全工程系,河南 郑州 451191;2.河南工程学院 机械工程系,河南 郑州 451191)
创新能推动社会的进步,是否拥有大批具有创新能力的高素质人才,决定了整个国家在国际竞争中的地位.培养大学生的创新能力、使学生掌握一定的创新技能和方法,是高等院校一项重要的教学改革内容.机械装置创新设计是培养机械专业大学生创新能力的一种有效手段.
概念设计是机械装置创新设计的重要环节,当设计者面对一项机械装置的设计任务时,经验是产生设计概念的最佳方法.设计者可以通过分析现有设计、收集资料、修理装置以及研究大众化产品的工作原理等途径来获取经验.但是,对于还在大学学习的大学生来说,他们没有丰富的设计经验,常在概念设计环节形成瓶颈,因此,寻求一种行之有效的创新设计方法、突破概念设计环节的瓶颈,成为大学生机械创新设计中亟待解决的问题.本文通过一个机械装置的创新设计案例,介绍了一套大学生易于掌握的创新设计方法,以促进大学生产生新的概念设计.
1 机械装置创新设计的步骤[1-2]
(1)找出具有设计者所期望设计规格的现有设计,并归纳出这些设计的拓扑构造特性;
(2)选择任意现有设计,将其转化为其对应的一般化链;
(3)运用数综合程序,综合出与步骤(2)中得到的一般化链具有相同数目机件和运动副的一般化图谱;
(4)根据特定化程序,分配机件和运动副的类型到每个一般化链,获得符合设计要求与约束的可行特定化链图谱;
(5)将每个可行特定化链具体化为与其对应的机械装置简图;
(6)从得到的设计图谱中去掉现有设计,获得新的设计图谱.
2 机械装置创新设计的方法
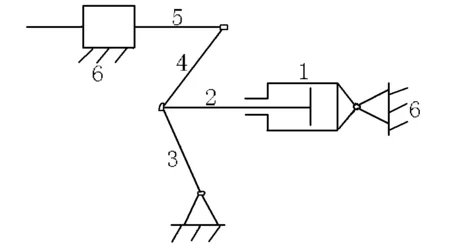
图1 六杆压紧机构Fig.1 The pressing mechanism of six bars
案例如图1所示,为气动压紧机构(平面六杆机构).压紧杆5是与机架6相连的移动构件,气缸部件1、2为动力源,要求气缸与机架固接或铰接.若此设计已有专利,要求设计者提出满足此约束条件的新的六杆压紧机构[3].
2.1 分析归纳机械装置的拓扑构造特性
机械装置的拓扑构造反映了机械装置机件和运动副的类型和数目以及机件和运动副之间的邻接和附随关系,是创新设计的重要环节.
首先,分析现有设计,归纳出气动压紧机构的拓扑构造特性,用指定的序号、符号表示构件及运动副,本例机架用KF表示,杆件用KL表示,活塞用KI表示,缸体用KY表示,气缸用KT表示,转动副用JR表示,移动副用JP表示.气动压紧机构的拓扑构造特性如下:
①它是具有7个运动副的平面六杆机构;
②它有1个固定杆(机架6,KF)、1个压紧杆(构件5,KL5)、2个连接杆(构件3,4,KL3,KL4)以及1个由活塞(构件2,KI)和缸体(构件1,KY)组成的气缸(KT);
③它有5个转动副(JR)、2个移动副(JP);
④它是自由度为1的机构.
一个具有NL个机件及NJ个i型运动副的机械装置(NL,NJ)的拓扑构造,可以用拓扑构造矩阵MT表示.MT为1个方阵,其对角线元素表示机件的类型;若机件和机件用运动副邻接,则右上角非对角线元素表示运动副类型,用指定符号表示;左下角非对角线元素表示该运动副的标号;假如机件和机件互不邻接,则表示为0.气动压紧机构的拓扑构造矩阵MT为:
气动压紧机构的拓扑构造矩阵表明了机构中构件与运动副的邻接关系.其中,对角线元素表示了机件的类型,每个小方阵则表示构件与构件通过运动副的邻接关系.拓扑构造矩阵表明,机架KF和缸体KY通过转动副JR在a点邻接;机架KF和活塞KI没有邻接关系,用0表示;机架KF和连接杆KL3通过转动副JR在c点邻接;机架KF和连接杆KL4没有邻接关系,用0表示;机架KF和压紧杆KL5通过移动副JP在f点邻接;缸体KY和活塞KI通过移动副JP在b点邻接等等.构建机械装置的拓扑构造矩阵具有十分重要的意义,通过改变机构中构件与运动副的种类及邻接关系,可寻求机械装置的全部构造结构.
2.2 将原始机构转化为对应的一般化链
机械装置的组成元素千变万化,会给机械装置研究带来很多困难.如果将机械装置转化为具有共性的一般化形式,即只含有一般化转动运动副和一般化运动连杆的运动链,就能够用一种基本方法来研究和比较不同的机械装置[4].
一般化运动副是一个通用的运动副的总称,它可以是1个转动副、移动副、球面副、螺旋副,也可以是其他种类的运动副.一般化连杆指具有一般化运动副的连杆,它可以是二副杆、三副杆或四副杆.
机械装置转化为对应的一般化链时,运动副的转化原则是:平面低副均用转动副JR表示;平面高副运用高副低代原理转化,即用2个转动副JR和1个连杆表示(二副杆).应注意的是,一般化运动副在转化之后,其约束应保持不变,邻接关系保持不变.二副杆、三副杆、四副杆的表示方法如图2所示.
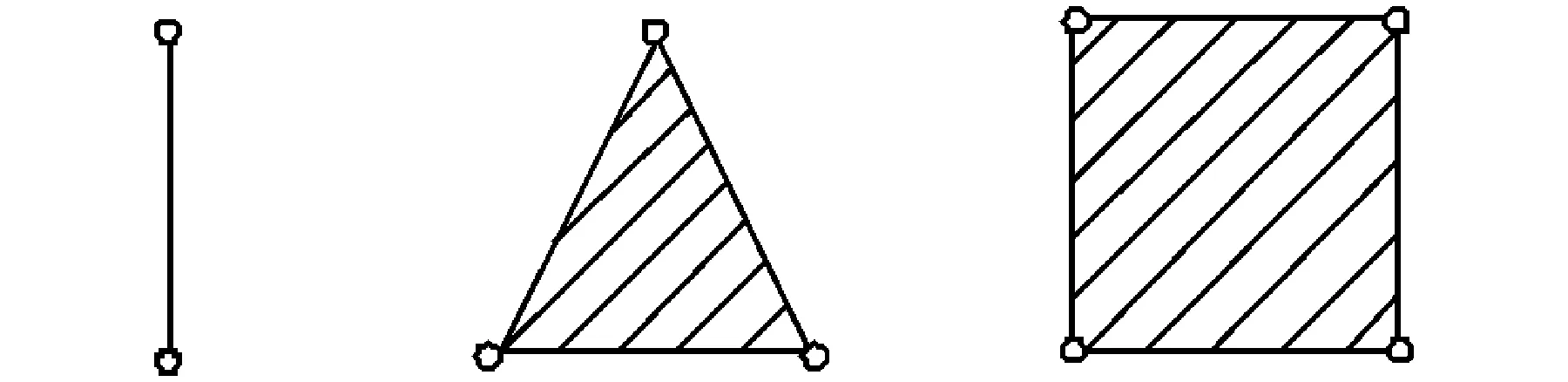
图2 一般化连杆的表示方法(a)二副杆(b)三副杆(c)四副杆Fig.2 The express method of general connecting poles (a) Two poles (b) Three poles (c) Four poles
分析气动压紧机构各构件的连接方式,通过以下步骤,将气动压紧机构转化为与其对应的一般化链.
①机架6(构件6,KF)和缸体1(构件1,KY)以转动副(a,JR)连接,和连接杆3(构件3,KL3)以转动副(c,JR)连接,和压紧杆5(构件5,KL5)以移动副(f,JP)连接,是三副杆.
②缸体1(构件1,KY)和机架6以转动副(a,JR)连接,和活塞2(构件2,KI)以移动副(b,JP)连接,是二副杆.
③连接杆3(构件3,KL3)和机架6以转动副(c,JR)连接,和连接杆4以转动副(d,JR)连接,是二副杆.
④连接杆4(构件4,KL4)和连接杆3以转动副(d,JR)连接,和压紧杆5(构件5,KL5)以转动副(e,JR)连接,是二副杆.
⑤压紧杆5(构件5,KL5)和连接杆4以转动副(e,JR)连接,和机架6以移动副(f,JP)连接,是二副杆.
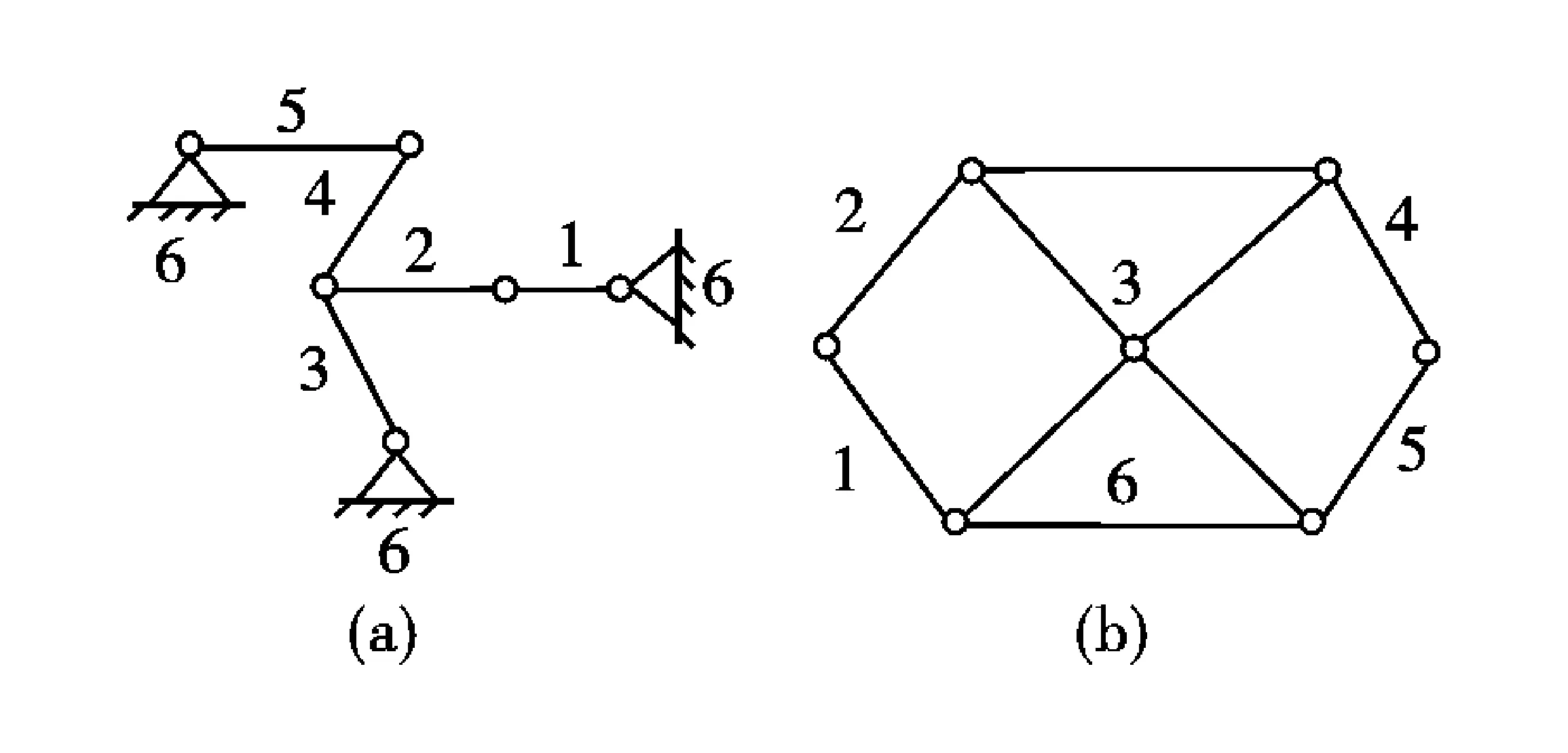
图3 (6,7)运动链Fig.3 (Six, seven)kinematic chain
首先,根据以上气动压紧机构各构件的连接方式,绘出气动压紧机构的简图,如图3(a)所示.然后,释放机架,构成1个首尾相接的、连通的、闭合的、无任何分离杆且只含简单运动副的链图.转化后的气动压紧机构的一般化运动链如图3(b)所示,它是一个具有6个一般化连杆和7个一般化转动副的一般化运动链,称为(6,7)运动链.
2.3 运用数综合找出全部的运动链图谱
数综合就是综合出与原始一般化运动链的杆数及运动副数相同的全部可能的一般化运动链图谱.首先,应对原始一般化运动链的组成连杆类型进行求解,再进行组合,即可找出全部可能的运动链图谱[4].
若一般化运动链由二副杆(NL2)、三副杆(NL3)、四副杆(NL4)等数目的连杆组成,则1个具有NL个一般化连杆和NJ个一般化运动副的一般化链的连杆类型可通过下面2个方程[4]得到:
NL2+NL3+…+NLi+…+NLm=NL,
(1)
2NL2+3NL3+…+iNLi+…+mNLm=2NJ,
(2)
其中,NLi的i表示连杆的运动副数目,如二副杆i=2;m表示连杆的最大运动副数.并且,运动副数NJ须受下面的算式约束:
NL≤NJ≤NL(NL-1)÷2 .
(3)
最大值m即mmax,可根据下列算式得到:
(4)
根据方程(1)~(4),可以得到一般化链全部可能的连杆类型.
对于(6,7)一般化链,NL=6,NJ=7,根据方程(4),mmax为
mmax=NJ-NL+2=7-6+2=3.
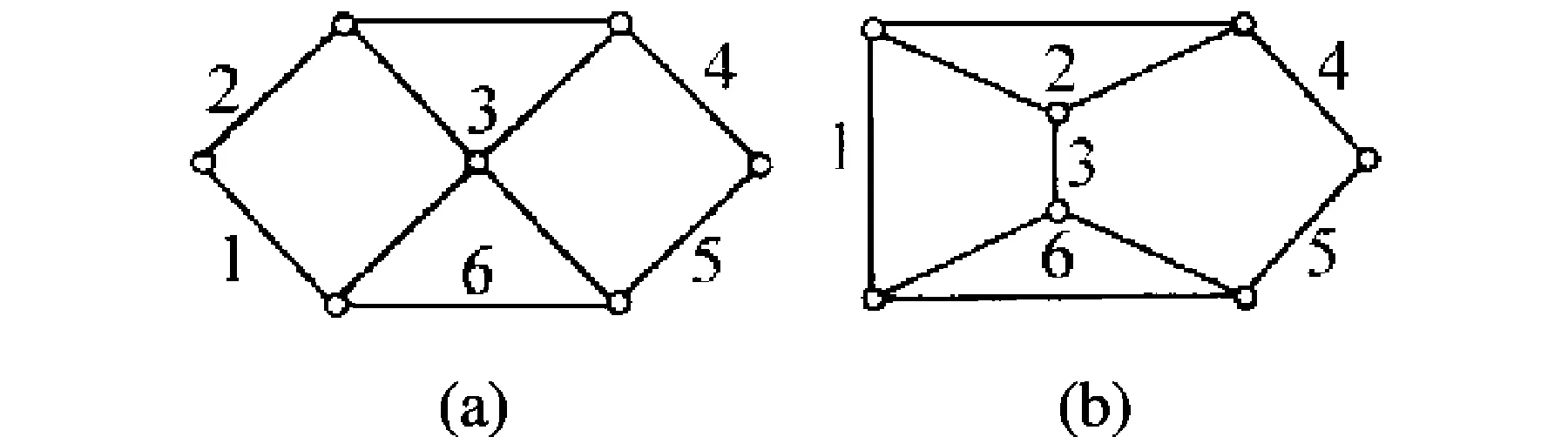
图4 (6,7)一般化运动链图谱(a)瓦特链 (b)史蒂文逊链Fig.4 (Six,seven)generalized kinematics chain map(a) Watt chain (b) Stephenson chain
根据方程(1)、(2),
NL2+NL3=6,
2NL2+3NL3=14,
解方程得NL2=4,NL3=2.
即(6,7)一般化链由4个二副杆、2个三副杆组成.对4个二副杆和2个三副杆进行不同组合,删除具有非正自由度的结构链,得到(6,7)一般化运动链图谱,如图4所示.其中,图4(a)称瓦特链,图4(b)称史蒂文逊链.
2.4 根据运动链图谱找出全部的特定化链
根据一定的设计要求与约束,在可用的一般化运动链图谱中分配特定类型的构件与运动副的过程,称为特定化.不同的设计约束、一个一般化运动链可以特定化为拓扑构造不同的各种机械装置.
根据气动压紧机构的原始结构,设计要求与约束如下:
①必须有一个固定杆作为机架;
②必须有一个气压缸且缸体与机架转动副连接;
③必须有一个压紧杆且与机架移动副连接.
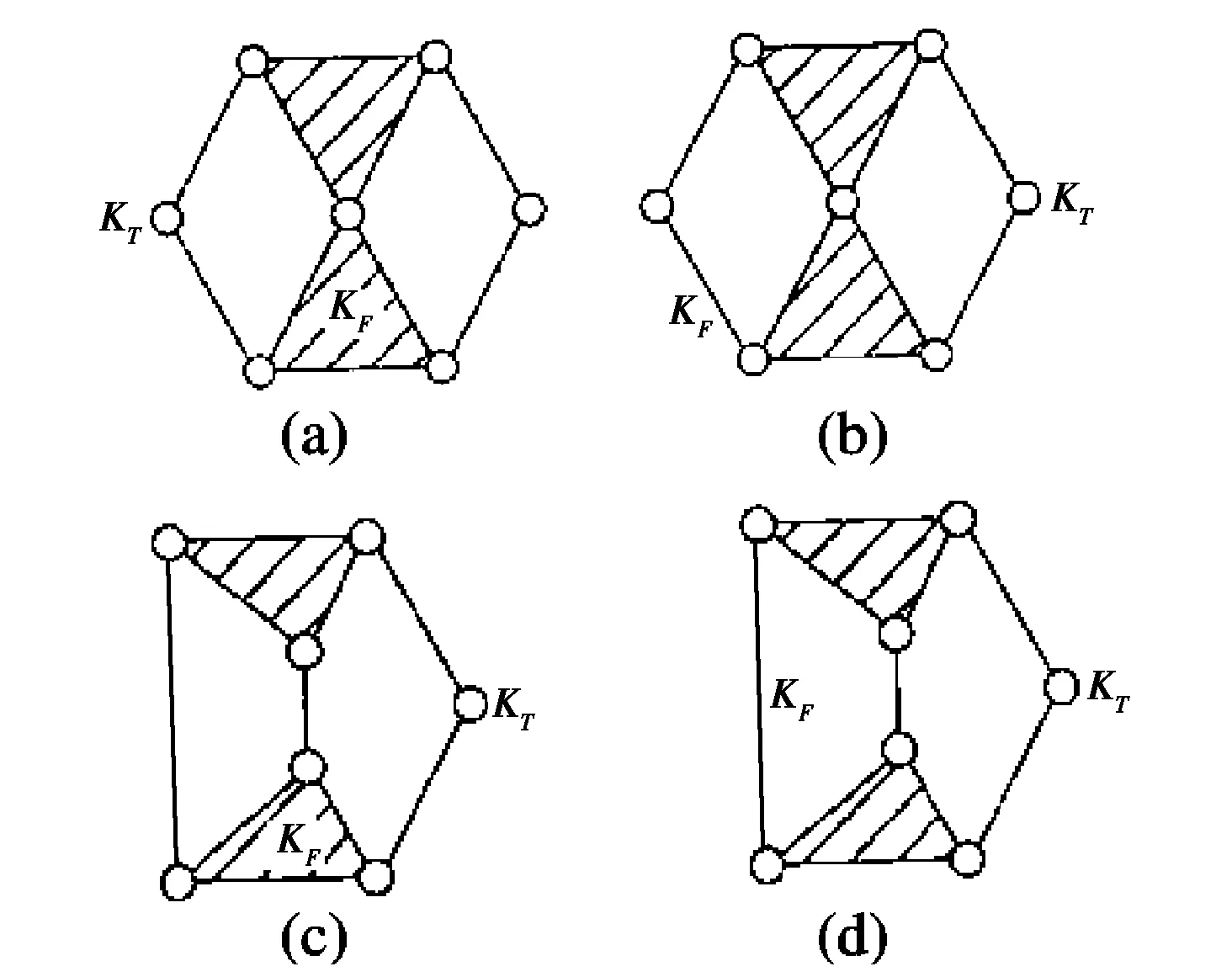
图5 固定杆的特定化链图Fig.5 Specific chain map of fixed poles
根据图4所示的瓦特链、史蒂文逊链,找出全部可能的可行特定化链.
2.5 将特定化链转化为与其对应的机械装置简图
确认固定杆(KF)的非同构链方案如图5(a)、(b)、(c)、(d)所示,设计要求与约束是:三副杆作为机架和二副杆作为机架.
运动链变异设计的最后环节,就是将特定化链图还原成机械装置简图.具体化是一般化链的逆过程,指定一般化链中运动副的类型可导出不同机构;指定一般化链中连杆的类型可获得不同的机构.如图5(a)、(b)所示的特定化链图,指定三副杆作为机架和二副杆作为机架;指定一般化链中运动副的类型(即改变构件与构件的不同连接方式),即可得到图6(a)瓦特链(b~e)4种机构新方案;如图5(c)、(d)所示的特定化链图,指定三副杆作为机架和二副杆作为机架;指定一般化链中运动副的类型(即改变构件与构件的不同连接方式),即可得到图7(a)史蒂文逊链(b~j)9种机构新方案.从这些新的机械装置简图中,可找出最佳设计方案.
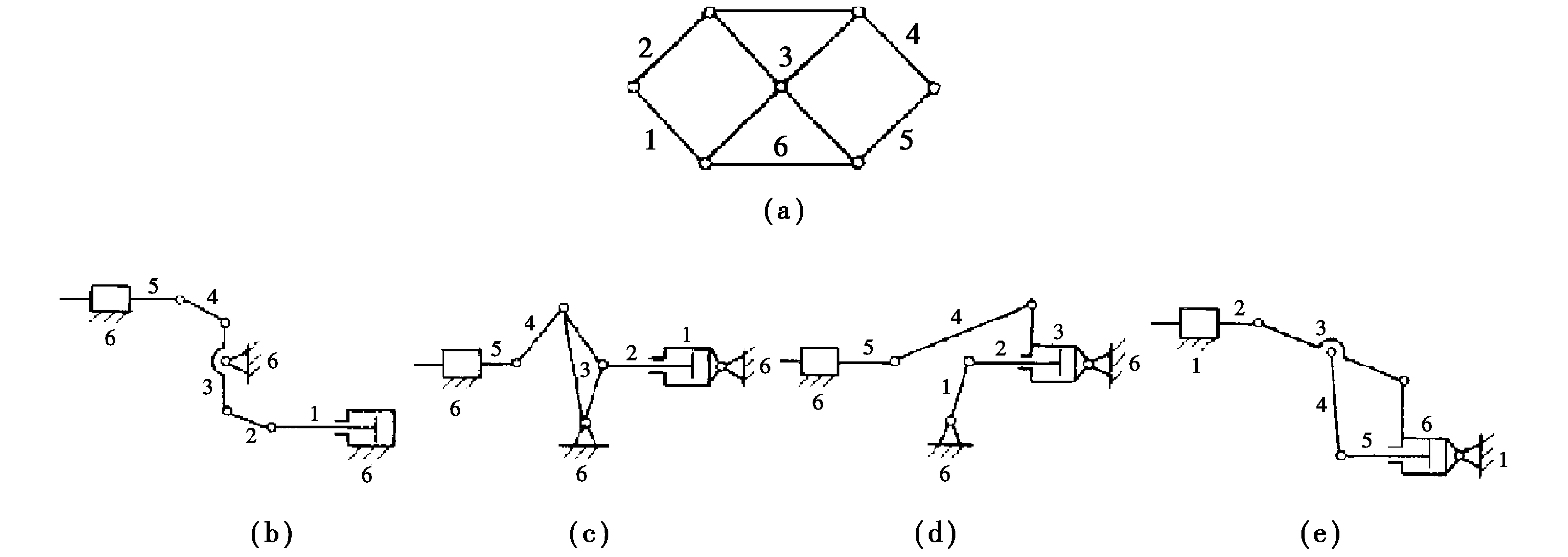
图6 瓦特链的机构方案Fig.6 The Watt chain mechanism scheme
3 结论
气动压紧机构的创新设计方法表明,通过构建机械装置的运动链图,寻求全部运动链图谱,在特定条件下对图谱中的构件和运动副重新指定及分配,即可得到机械装置的全部构型方案.通过机械装置的拓扑构造矩阵,可运用计算机对构件和运动副进行匹配运算,对于开发计算机辅助机构构型创新设计具有重要的理论价值.实践证明,运动链变异的机械装置创新设计,是一种高校大学生容易掌握的创新设计方法,使学生克服了在设计概念产生环节形成的瓶颈.有了新的设计概念,可通过机械装置的三维图形构建、运动及动力分析等环节,找出最佳设计方案.
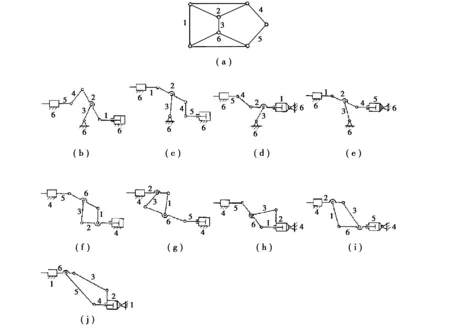
图7 史蒂文逊链的机构方案Fig.7 The Steven Johnson chain mechanism scheme
参考文献:
[1] 颜鸿森.机械装置的创造性设计[M].北京:机械工业出版社,2002.
[2] 曹惟庆,徐曾荫.机构设计[M].北京:机械工业出版社,2000.
[3] 孟宪源,姜琪.机构构型与应用[M].北京:机械工业出版社,2004.
[4] 卢开澄.图论及其应用[M].北京:清华大学出版社,1984.