基于XE164的无传感器PMSM驱动控制系统设计
2011-11-20谢玉春苏健勇杨贵杰李铁才
谢玉春,苏健勇,杨贵杰,李铁才
(哈尔滨工业大学,黑龙江哈尔滨150001)
0 引 言
永磁同步电动机(以下简称PMSM),以其优异的性能在工业自动化、数控机床、机器人、航空航天等场所得到广泛应用。但是传统的永磁同步电机都需要一套复杂的位置传感器来测量转子的位置和角度,其优点是可以准确方便地获得转子位置信号,然而却限制了在一些如高温密封、粉尘环境等特殊场合的应用,传感器的存在增加了电机自身的尺寸和系统成本,降低了系统可靠性和稳定性。因此,研究无磁极位置传感器PMSM的转子位置检测技术具有重要理论意义和实际应用价值。
在无磁极位置传感器的条件下,PMSM磁极位置检测技术是利用绕组中的相关变量,如定子电压、定子电流等来估算转子的位置和速度,取代机械传感器,实现电机控制。目前已有多种无磁极位置传感器PMSM的转子位置检测方法,如反电动势法、三次谐波法、磁链估计法、滑模观测器法、谐波注入法等[1],其中磁链估计法是一种利用测量出的定子电压和电流来估算磁链的方法,再根据磁链与转子位置的关系估计出转子的位置。这种估计法准确度较高,受电机参数与测量误差的影响较小,调速范围广,适用于正弦波和方波电动机,是一种较理想的检测方法[2]。
本文采用改进的磁链估算方法间接检测转子位置和转速,设计以德国Infineon公司16位单片机XE164为主控芯片的PMSM无磁极位置传感器驱动控制系统。通过仿真和实验结果验证系统设计的可行性和正确性。
1 PMSM数学模型
PMSM为多变量、强耦合的系统,电磁关系比较复杂,为简化分析,做如下假设:
(1)忽略电动机铁心的饱和,磁路为线性;
(2)不计电机中的涡流和磁滞损耗;
(3)电机的电流为对称的三相正弦波电流;
(4)永磁体在气隙中产生的磁场呈正弦分布,在定子相绕组中感应出的反动势为正弦波。
(5)转子上没有阻尼绕组,永磁体也没有阻尼作用。
经过上述假设,列写在两相静止α-β坐标系下的PMSM数学模型:

PMSM无磁极位置传感器矢量控制的核心问题是估算转子磁链的位置。分别求出转子磁场在定子α、β轴所产生的磁链分量ψfα、ψfβ,通过反正切函数来求出转子电角度θ^r。
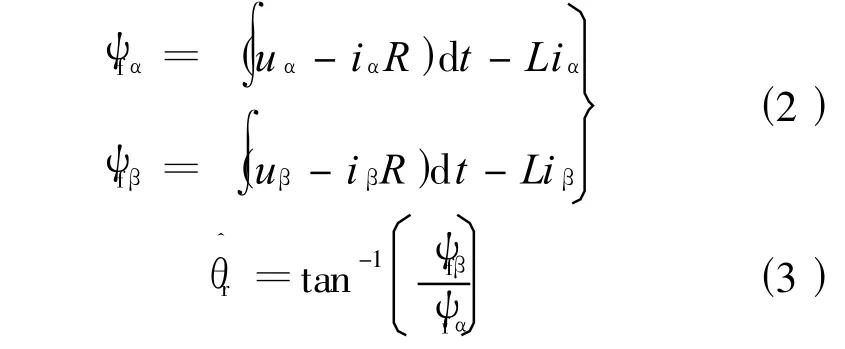
式中:L为定子电感;R为定子电阻;eα、eβ为α、β轴感应电动势;iα、iβ为α、β轴定子电流;uα、uβ为α、β轴定子电压;θ^r为转子电角度;ψfα、ψfβ为转子磁场在定子α、β轴所产生的磁链分量。
2 无位置传感器PMSM驱动控制系统设计
2.1 无位置传感器PMSM系统控制策略
系统采用Id=0的磁场定向控制算法,无位置传感器PMSM驱动系统结构图如图1所示。

图1 无位置传感器PMSM驱动系统结构图
控制系统中共含有三个闭环,外环为速度环,内环为两个电流环,三个闭环全部采用经典的PI调节器。只需要检测定子两相电流,然后通过Clarke变换,就可以算出iα、iβ、uα、uβ为已知量,由控制器给出,结合iα、iβ、uα、uβ进行磁链估算,磁链估算结果经数字锁相环输出转子角度信号和速度反馈信号。
无磁极位置传感器PMSM系统在低速或零速运行时,由于电机的反电势很小或为零,无法正确计算出定子磁链,且电机无编码器等位置传感器,难以直接起动[3]。采用斜坡信号开环起动的方法予以解决。电机以一定转速开环运行,能够正常计算位置信号之后,再切换到无磁极位置传感器矢量控制模式。
2.2 磁链估算
基于式(2),改进的磁链估算原理图如图2所示。其中积分环节用一阶低通滤波代替,磁链输出加高通滤波器,该方法不仅能有效地抑制直流偏置,还能保证系统的稳定性,而且算法简单,便于数字实现[4-5]。经离散化处理,磁链检测的差分方程如下:
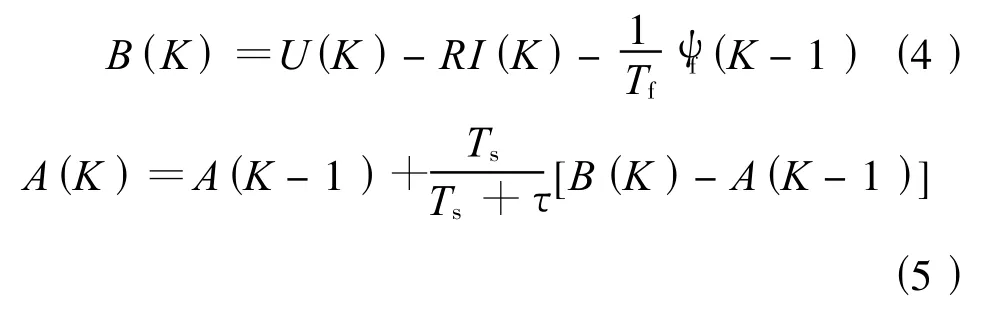

式中:U(K)为第K个采样周期中的电压空间矢量计算值,I(K)为第K个采样周期中的电流信号输入,ψf(K)为第K个采样周期中磁链信号的输出,R、Ls、Ts、Tf、τ为已知,经由上式即可计算出α、β轴所产生的磁链分量ψfα、ψfβ。
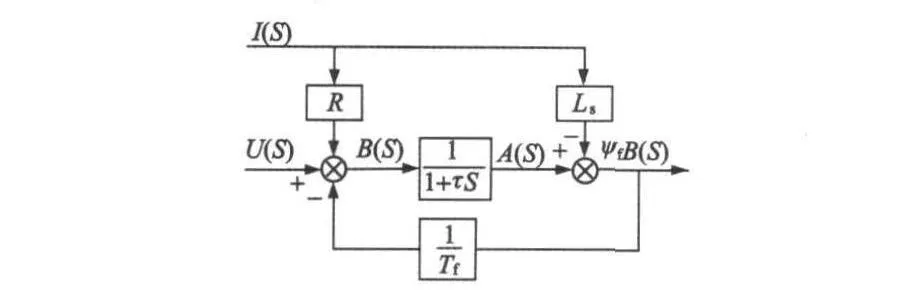
图2 磁链估算原理图
2.3 位置和速度估计
锁相环法使用低通滤波器对高频信号有较好的抑制作用[6],且比直接反正切计算法抗扰动能力强,所用时间少,系统选择锁相环的方法实现位置和速度的估计。
锁相环(PLL)原理图如图3所示。

图3 锁相环(PLL)原理图

图4 PLL结构框图

式中,ζ、ωn可根据二阶系统的响应特性进行设计以得到期望特性,进而可以确定Kp、Ki参数。PI调节器输出为估算速度ω^e,积分得转子电角度θ^r。加大比例系数可以减小静差,但会导致系统动态质量变坏,甚至导致系统不稳定。积分环节可以消除静态误差,积分时间常数越小则积分作用越强,消除静差的过程越快。
在实际应用中,当转速不变时,锁相环的输入为斜坡函数。根据反馈控制原理,对于斜坡输入,上述锁相环系统的稳态误差:

由式(9)可知,采用锁相环可以准确地从反电势中提取出转子位置信息,从而实现了有效位置和速度估算。
2.4 估算角度分段补偿
磁链的估算经过两个滤波器,虽然消除了直流偏置和初值误差,然而磁链的相位却发生了滞后。滞后角度随运行频率的增加而增加,估算角度对实际角度产生相应滞后,需要采取合适的措施进行角度补偿。
由于滞后角度随运行频率的增加而增加,可将补偿角度与速度建立对应关系,根据实际情况确定分几段进行补偿。分段补偿框图如图5所示。

图5 角度分段补偿框图
3 仿真和实验结果分析
系统构成框图如图6所示。整个控制系统采用德国Infineon公司16位单片机XE164作为核心控制器件,主要完成电机控制、磁链估算和信号采样及处理等任务。XE164是高性能数字处理芯片,内部集成DSP算法模块,处理速度快,具有丰富的硬件资源[7]。

图6 控制系统硬件构成图
XE164的CCU6模块产生PWM信号,经驱动电路驱动目标电机运转。电压、电流等信号经处理电路后直接送入10位A/D转换模块,检测精度较高。同步通信模块SSC实现旋变信号处理和数模DA转换输出。异步通信模块ASC实现与上位机的串口通信。
功率电路部分,交流220 V经过不可控整流桥整流。母线电压经三相H半桥逆变器控制PMSM,同时作为辅助电源电路的输入,旋变作为实际位置检测装置,永磁直流电动机作为PMSM负载。
实验所采用隐极式永磁同步电动机,为了便于控制,将d、q轴电感和的平均值作为定子相电感参数带入。实验电机具体参数如表1所示。数字仿真利用Matlab/Simulink实现,采用离散化的方法实现数字磁链估算模块。

表1 实验电机参数
图7a是速度给定为ωr且速度估计值与实际值相等时α、β轴磁链观测值的仿真结果;图7b为角度估算值与实际角度关系。由仿真可知,运用该磁链估算法,可以准确地观测到磁链分量,进而得到准确的磁极位置信息。

图7 当=ωr时磁链观测结果和角度对比
图8是给定转速为1 000 r/min时稳定运行后转子机械速度的估计值与实际值误差。速度误差在零附近小幅波动,速度估算准确。

图8 转速为1 000 r/min,速度估计值与实际值误差
图9是输出电流有效值为0.9 A时的电流波形及其谐波含量分析,电流谐波含量3.8%,电流畸变率较小,转矩波动小。图10为实际系统运行速度为1 000 r/min时的α、β轴磁链观测结果,与仿真结果一致,该磁链估算方法可以准确地观测磁链。图11为旋变检测角度和位置估算输出角度关系,角度误差小,位置估算准确。
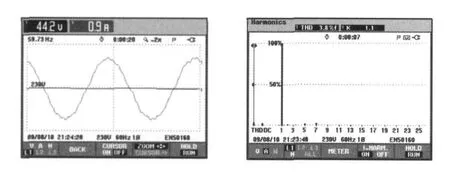
图9 电流波形及其谐波含量分析

图10 =1 000 r/min时磁链观测结果

图11 电角度实际值和估计值
4 结 语
本文采用改进的磁链估算方法,利用电机定子电流采样值和矢量控制产生的电压,对磁链进行估算,进而实现位置和速度辨识。通过对积分环节的直流偏置消除以及数字锁相环技术、估算角度分段补偿等关键问题的研究,提高系统位置辨识精度。仿真和实验结果表明,该磁链估算方法可以准确地观测磁链,位置和速度算法稳态精度高,跟踪速度较快,系统所采用的基于磁链估算的无磁极位置传感器技术和矢量控制策略是切实可行的。
[1] Acarnley P P,Watson J F.Review of Position-Sensorless Operation of Brushless Permanent-Magnet Machines[J].IEEE Transactions on Industrial Electronics,2006.53(2):352-362.
[2] 陈玉,李声晋,卢刚,等.空调压缩机用无位置传感器PMSM控制器设计[J].微特电机,2010(9):67-69.
[3] Foo G,Rahman M F.Direct Torque Control of an IPM-Synchronous Motor Drive at Very Low Speed Using a Sliding-Mode Stator Flux Observer[J].IEEE Transactions on Power Electronics,2010,25(4):933-942.
[4] Zhao K,You X.Speed Estimation of Induction Motor Using Modified Voltage Model Flux Estimation[C]//IEEE 6th International Power Electronics and Motion Control Conference.2009:1979-1982.
[5] Hurst K D,Thomas G,Griva G,et al.Zero-speed tacholess IM torque control:Simply a matter of stator voltage integration.[J].IEEE Trans.on Industry Applications,1998,34(4):790-795.
[6] 苏健勇,李铁才,杨贵杰.基于四阶混合滑膜观测器的永磁同步电机无位置传感器控制[J].中国电机工程学报,2009,29(24):98-103.
[7] Infineon公司.XE164 16-bit Single-Chip Real Time Signal Controller V2.1[M].Infineon Technologies AG,2008:4-57.