对转永磁同步推进电动机的矢量控制
2011-11-20徐海珠谢顺依张林森连军强
徐海珠,谢顺依,张林森,连军强
(海军工程大学,湖北武汉430033)
0 引 言
水下航行器航行过程中需要稳定姿态,因此大多采用对转螺旋桨推进系统以克服陀螺效应[1]。对转永磁同步推进电动机[2]因为没有电刷、换向器和齿轮,有两个机械输出端口[3],可直接驱动对转螺旋桨推进系统,比功率大、可靠性高;转矩脉动小、散热效果好;径向拉力和轴向拉力小、无陀螺效应等优良性能,因此在舰船、鱼雷、水下自主航行器等水下电力推进领域广泛应用[4-5]。
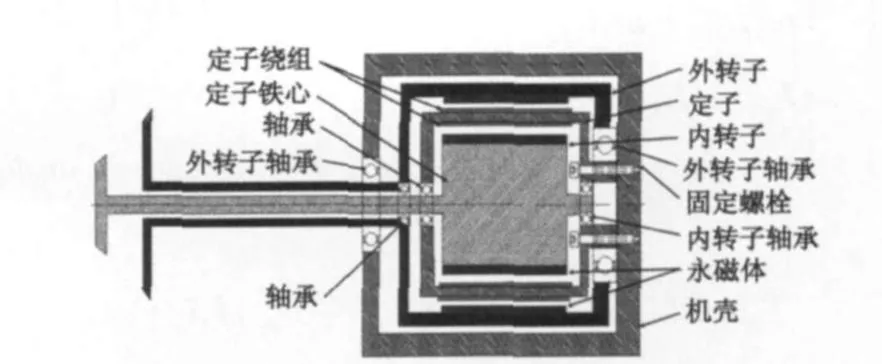
图1 对转永磁同步推进电动机的结构
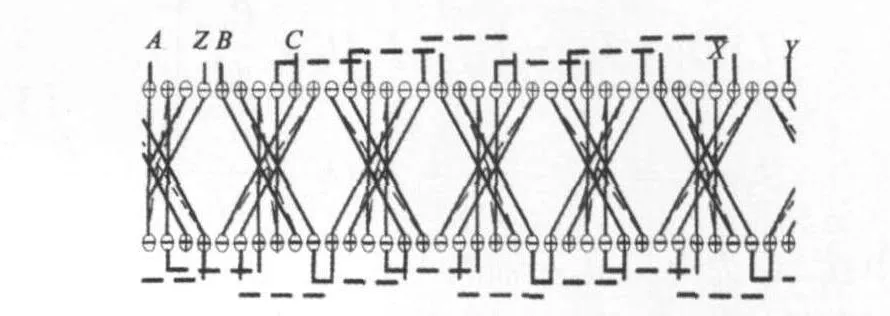
图2 对转永磁同步推进电动机的绕组端部
1 结构和工作原理
对转永磁同步推进电动机由一个定子和两个永磁转子组成,外转子的内表面和内转子的外表面都安装稀土永磁体,如图1所示。
定子内外两侧统一开槽,由一套绕组按照螺线管方式绕成,绕组端部大大缩短,效率大幅提高。定子内外气隙都得到利用,功率密度大为提高。
电枢内外两层绕组的相序相反[6](定子两侧A相位置不变,B相和C相绕组位置交换),如图2所示,在两层气隙中分别产生等速而异向旋转的磁场。因此通入一组对称三相交流电,即可在两个转子上产生等大而反向的电磁转矩,两转子通过单端同心双轴输出机械功率。
在两个转子上分别安装一套霍尔传感器磁钢,在定子内外两侧分别安装霍尔器件,可以分别得到两个转子的位置信息,因为定子静止,不需馈电环。
文献[2]将对转永磁同步电机分解为内电机和外电机(定子内侧绕组和内转子构成内电机,定子外侧绕组和外转子构成外电机),讨论了其工作原理和电磁模型[2];文献[7]研究了双转子电机的设计方法[7]。但已有文献中对该种电机控制策略的研究很少,特别是当推进器受到扰动时,两转子转速发生差异,航行器易发生陀螺效应,限制了其在精密航行器上的应用。因此,快速消除电机的陀螺效应,维持电机的等速对转特性,是对转永磁同步推进电动机急需解决的难题。
本文借鉴传统PMSM的矢量控制方案,对内外转子的转速分别进行PI控制,并采取双转子转速跟随方案,建立了对转永磁同步推进电动机的矢量控制系统,可有效解决上述问题。
2 矢量控制原理
2.1 数学模型
将电动机分解为内电动机和外电动机,在d1-q1和d2-q2坐标系下,分别建立两个电机的状态方程,然后在d、q坐标系下合成。虽然两电动机转速方向相反,但两转子旋转方向分别和其电枢磁场方向相同,而两个电枢是由同一组电流供电,因此在矢量图上,两电机的转速方向相同,即电流方向[8]。
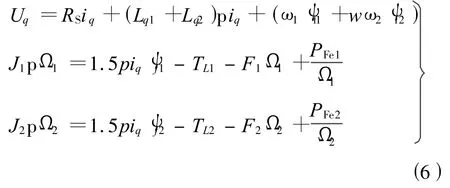
根据对转永磁同步推进电动机的工作原理,建立电机的电压方程、转矩方程和运动方程,如下:
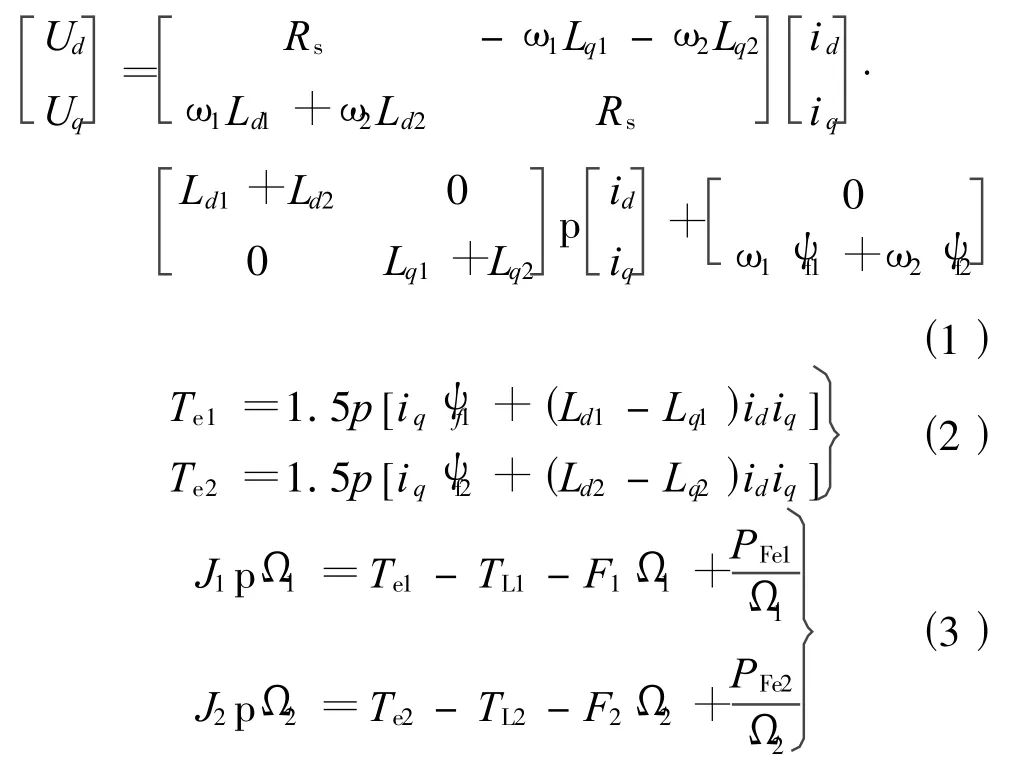
式中:id、iq为电机d、q轴的电流;Ld1、Lq1为内转子在d、q轴下的电感;Ld2、Lq2为外转子的d、q轴电感;p为电机极对数;J1、J2,ω1、ω2,Ω1、Ω2,TL1、TL2,F1、F2、PFe1、PFe2,ψf1、ψf2分别为内外转子的转动惯量,机械角速度,负载转矩,阻尼系数和铁耗、永磁磁链;Te1、Te2为内外转子的电磁转矩;Te为总电磁转矩;p Ω1、pΩ2为Ω1、Ω2的微分。
2.2 电磁关系
根据电动机工作原理和数学模型,可得到内电动机和外电动机的电磁关系:
式中:R1、R2,B1、B2,ξ1、ξ2,P1、P2为内外转子的转子外径,磁密,反电势和电磁功率;lef为电枢的有效长度;I为电枢电流。
由式(4)可知,当内、外电动机的外径与磁密成反比时,两转子的功率相等。由式(5)知,当两转子的转动惯量、负载转矩和摩擦系数相等时,两转子转速相等。在满足上述条件时,两电动机的反电势和磁链也相等。
2.3 矢量控制
矢量控制具有线性转矩特性,控制效率高,调节器设计易于实现,具有良好的起动性能和较宽的调速范围[9]。对转永磁同步推进电动机的数学模型经过坐标变换后,id、iq之间仍存在着耦合,要获得良好的动、静态性能,就必须实现id、iq的解耦[10]。如能控制id≡0,整个控制过程中就没有电枢反应的去磁问题,不涉及电机参数,实时性高、鲁棒性好。此时,对转永磁同步推进电动机的状态方程式可简化为:
显然,电流得到解耦,可以独立调节iq,实现转矩的线性控制。
3 仿真模型
3.1 电动机本体模型
根据对转永磁同步推进电动机的数学模型,可以利用Matlab/Simulink建立电机的仿真模型,对两个转子分别输入不同的负载转矩,模拟水流扰动时两的螺旋桨的不同受力。这里仅以电动机的机械模型为例,介绍其内部结构,如图3所示。
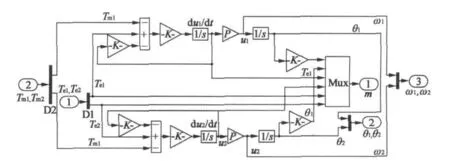
图3 机械模型
3.2 矢量控制系统模型
对转永磁同步推进电动机中,内外电动机的电枢电路串联,仅需要对定子电流进行控制,就可以完成电机双转子的转速和转矩控制。矢量控制系统采用转速、电流双闭环控制,外环为转速环,内环为电流环,采用id=0控制。当电动机受到扰动时,两个转子的转速产生差异,电机发生陀螺效应。本文对内外两个转子采用相同的参考转速,分别进行PI调节;系统采用外转子转角进行Park变换,让内转子转速跟随外转子转速,可以保证电动机扰动后两个转子转速迅速恢复相等。
控制系统主要包括对转永磁同步推进电动机、三相逆变器、SVPWM模块、Park变换、Clarke变换及其反变换、交直轴电流PI调节以及转速PI调节、电动机位置和转速检测、电流和电压检测电路等模块。
根据前文建立的对转永磁同步推进电动机的数学模型,在Matlab/Simulink环境下搭建对转永磁同步推进电动机矢量控制系统的仿真模型,如图4所示。
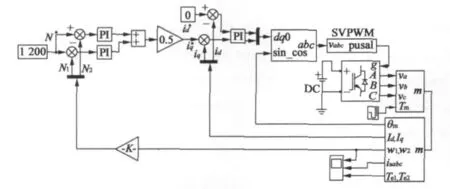
图4 对转永磁同步推进电动机控制系统的仿真模型
4 仿真结果及分析
仿真条件如下:极对数为6,额定功率为15 kW,两转子的额定转速均为1 000 r/min,电阻0.05 Ω,内外电动机的交、直轴电感均为0.35 mH,粘滞系数和转动惯量均为0.065 N·m·s和0.75 kg·m2。仿真时间0.6 s,在0.1 s时设置两转子的负载为[8,14]N·m,模拟电动机扰动。在0.2 s时负载突降为[3,5]N·m,0.4 s时负载骤增为[20,20]N·m,得到电动机转速、转矩响应。
电动机转矩响应如图5所示,起动后转矩较大,因扰动0.1 s时转矩在12 N·m附近震荡,0.2 s负载突降后很快稳定在3 N·m,0.6 s负载骤增后又迅速稳定到20 N·m。
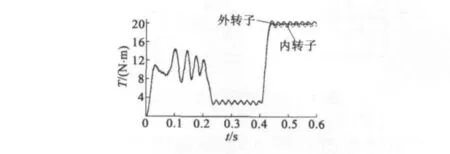
图5 转矩响应曲线
图6为电动机两个转子的转速曲线。0.1 s时,由于电动机扰动,两转子负载产生差异,转速差别逐渐增大,但在相同的参考转速和内外转子转速跟随的条件下,经过0.05 s,两转子转速差异越来越小,最终趋于相等。
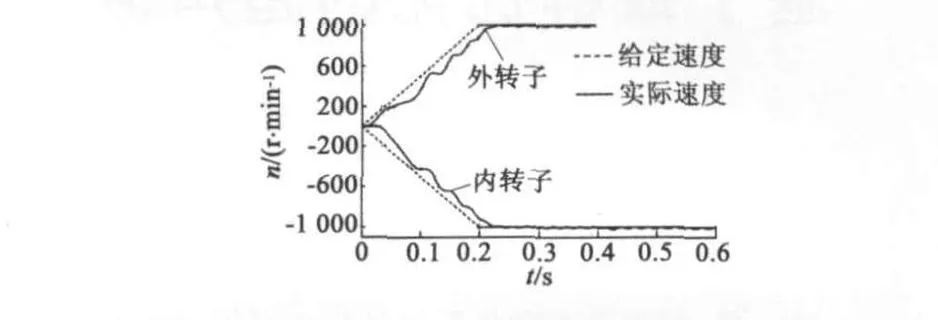
图6 转速响应曲线
5 结 语
本文根据对转永磁同步推进电动机的工作原理建立了电机的数学模型和仿真模型,探讨了矢量控制技术在该种电机上的适用性,设计了电机扰动情况下的双转子转速跟随技术,仿真结果证明,矢量控制技术可以很好的实现对转双转子永磁同步电机的调速,并解决了双转子的转速跟随问题。系统结构简单、控制精确,有很好的应用前景。
[1] Gottipati P.Comparitive study of double rotor permanent magnet brushless motors with cylindrical and disc type slot-less stator[D].Louisiana State University,Baton Rouge,2007.
[2] 张凤阁,刘光伟,陈进华.异向旋转双机械口永磁电机磁路建模与场分析[J].电机与控制学报,2009,13(6):804-809.
[3] Atsushi I,Hiroyasu S,Masato E.Magnetic characteristic analysis of dual-rotor machines[C]//Proceedings of the 12th International Symposium on Interdiscip linary Electromagnetic,Mechanic and Biomedical Problems.Bad Gastein,2007:173-177.
[4] 何苗.双转式永磁无刷电动机的控制[J].微特电机,2009,37(11):26-29.
[5] 张式勤,邱建琪,储俊杰.双转式永磁无刷直流电动机的建模与仿真[J].中国电机工程学报,2004,24(12):176-181.
[6] Zhang F,Liu G,Shen Y,et al.Characteristic study on a novel PMSM with opposite-rotation dual rotors[C]//IEEE International Conference on Electrical Machines and Systems.Seoul,2007:805-809.
[7] 徐衍亮,王法庆,冯开杰,等.双转子永磁电机电感参数、永磁电势及齿槽转矩[J].电工技术学报,2007,22(9):40-44.
[8] 刘光伟.异向旋转双转子永磁同步电机基础理论分析与仿真研究[D].沈阳:沈阳工业大学,2008.
[9] 刘明丹,刘念.两种基于Matlab对永磁同步电动机矢量控制系统的仿真方法[J].微特电机,2005,33(7):26-28.
[10] 薛山,温旭辉.基于矢量空间解耦的五相永磁同步电机建模与仿真[J].微特电机,2006(6):21-24.