基于可智能切换车载照灯的车载照明灯控制系统*
2011-11-17杨敬锋卢启福
杨敬锋,李 亭,赵 娜,卢启福
(1.华南农业大学,广东 广州 510642;2.中山火炬职业技术学院,广东 中山 528436;3.广州市兴达电子科技有限公司,广东 广州 510640)
基于可智能切换车载照灯的车载照明灯控制系统*
杨敬锋1,李 亭2,赵 娜3,卢启福1
(1.华南农业大学,广东 广州 510642;2.中山火炬职业技术学院,广东 中山 528436;3.广州市兴达电子科技有限公司,广东 广州 510640)
为提高驾驶安全性与智能化,本文基于LED设计了车载照灯及其相应的控制系统,有效地解决了行车时外界光线不断变化使司机的视线受到一定影响的问题,在节能、安全、智能等多角度有效提高驾驶的安全性和智能化。
车载照灯;LED;控制系统
一、引言
我国夜间发生的交通事故,其中70%左右是由于驾驶人员违章使用灯光造成灯光眩目而无法看清前方路面情况而造成的[1]。车载照灯的控制系统的智能化设计是解决在汽车夜间行驶会车时两车远灯强光相互照射造成驾驶人员目眩而无法看清前方路面情况的重要手段之一。然而,在目前相关研究人员提出的车灯控制系统大多基于电子设备的大量应用导致车身布线的增加和复杂化[2,3,4]、各电子控制单元间数据交换的错综复杂[5,6]、外部车灯手动和自动操控装置存在的诸多不足[7]等提出,较少从安全角度出发进行控制系统设计。
目前车载照灯(前照灯(近光灯和远光灯)、前雾灯、倒车灯、侧照灯等)大多使用氙气灯,其控制通常由驾驶员在驾驶过程中根据实际情况和驾驶经验判断各种氙气灯的使用。在解决了散热等技术难题的情况下,LED灯目前已经开始在车载前照灯中使用,凭借其节能高效等优点逐步取代氙气灯。然而,不管采用氙气灯还是LED灯作为车载前照灯,行车时外界光线不断变化,使司机的视线受到一定影响,特别是在夜间驾车,远光灯的使用在会车时容易造成驾驶员眩晕现象,而且近光灯和远光灯的频繁切换除了增加驾驶员体力上的疲劳外,还增加了视觉疲劳,更严重的是,在疲劳驾驶和醉酒驾驶的情况下,光线是引起驾驶员眩晕加速危险驾驶的重要原因,对驾驶员和乘坐人员的安全构成一定的影响,容易造成偏离路线甚至追尾等情况发生。本文以行车安全为出发点,基于LED设计了车载照灯及其相应的控制系统,有效地解决了行车时外界光线不断变化使司机的视线受到一定影响的问题,在节能、安全、智能等多角度有效提高驾驶的安全性和智能化。
二、车载照明灯控制系统设计
针对车载照灯对驾驶员视线影响的不足,本文设计一种可兼容LED、氙气灯等多种车载照明灯控制系统,实现在各种场合下最大程度地保障驾驶员视野,减少行车安全隐患,同时实现节约电能,提高汽车燃料使用效率。
基于可智能切换车载照灯的车载照明灯控制系统主要由车载照灯(前照灯(近光灯和远光灯)、前雾灯、倒车灯、侧照灯等)、感光传感器、开关、电源、控制器等构成,其原理图如下图所示:
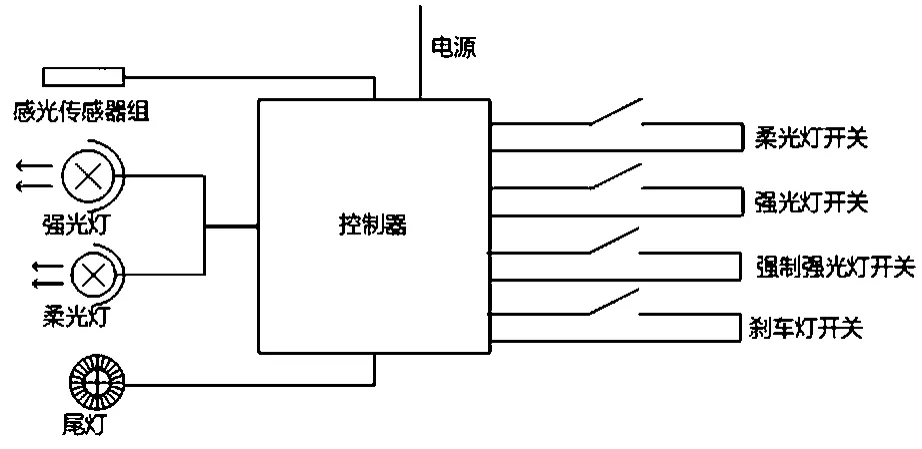
图1 基于可智能切换车载照灯的车载照明灯控制系统原理图
基于可智能切换车载照灯的车载照明灯控制系统的关键部分为控制逻辑设计部分,针对夜间行车的具体情况,说明车载照明等控制系统的主要内容。
1.相向会车模式
现有的远光灯仅由光源(灯泡)、反射镜及透光镜组成,其控制通常只通过驾驶员控制开关进行打开和关闭操作,灯光的亮度不可控。本文设计的远光灯由两个电源(由LED灯或者疝气灯组成,分别为强光灯和柔光灯)、感光传感器组、反射镜、透光镜以及控制器组成。正常夜间行车时,汽车近光灯关闭,远光灯中的强光灯根据路面具体光线情况,自动调节适合于夜间行车的光照环境,近光灯则只需要进行相关的光度补偿,在不需要进行光度补偿的情况处于关闭状态。在夜间会车时,远光灯的功能是,在两车相距路程达到远光灯有效距离时(150米),远光灯的感光传感器组将会车信号发送到控制器上,柔光灯打开,强光灯根据感光传感器组信号的强弱自动降低灯光亮度,当强光灯亮度等于或者低于柔光灯亮度时,强光灯关闭。需要说明的是,强光灯亮度的变化是根据感光传感器组信号(两车距离越近,采集的远光灯亮度越大)递减,强光灯亮度降至柔光灯亮度关闭后,近光灯打开,柔光灯关闭,实现照明灯具的亮度柔性切换。两车会车时,车载前照灯只保留近光灯,从而避免由远光灯引起的眩晕现象。会车后,感光传感器组由于没有接收到会车信号,柔光灯打开,强光灯亮度迅速提升,当强光灯亮度大于柔光灯时,柔光灯与近光灯关闭,强光灯迅速恢复到正常照明状态。在采用LED灯作为强光灯和柔光灯时,可采用3基色LED灯,使车载LED照明灯能够按照需要进行亮度和光的色彩调节。
以上是仅有一辆车相向会车时的控制器工作流程,当多辆车夜间相向会车时,远光灯中的强光灯将根据感光传感器组接收的亮度信号进行亮度调整,当亮度小于柔光灯时强光灯关闭,近光灯打开;当感光传感器组接收的亮度信号低于已经设置的亮度阈值,远光灯中的强光灯恢复。
目前汽车的尾灯也由灯泡、反光瓦、染色散射面罩组成,与刹车灯共用一个灯泡,而且亮度通过刹车联动微动开关控制。夜间会车时驾驶员容易由于远光灯的照射产生的耀眼的两柱强烈白光而使驾驶员视野受阻,容易由于无法辨别前车尾灯的信号而引起的追尾等事故。
车载照明灯控制系统的尾灯/刹车灯控制则与远光灯的控制同步。在会车前,当远光灯的柔光切换至近光灯时,刹车灯打开,迅速调整至最高亮度,以提示后车注意追尾。
2.非相向会车模式
若在同向超车、拐弯回车等短距离会车的情况,由于感光传感器组的信号突然增强,远光灯控制中的强光灯、柔光灯、近光灯切换流程并不适合相向会车模式时,可通过强制强光灯开关,实现柔光灯与近光灯的即时切换,柔光灯在切换过程中起亮度补偿作用。而会车完成后,感光传感器组信号突降,强制强光灯开关闭合,强光灯迅速打开。非相向会车模式下的尾灯/刹车灯控制与相向会车模式相同。
三、车载照明灯控制系统设计关键技术
车载照明灯控制系统除制造工艺关键技术外,控制方面的关键技术主要包括数据采集和灯光控制技术。
1.数据采集技术
车载照明灯控制系统的关键技术之一为信号采集方式的定制,表现为灯光信号采集技术。白天行车默认所有车载照灯处于关闭状态,夜间行车则需要视具体行车环境中照明情况(路灯的开关状态与亮度状况、会车车辆数量等)而需要作出相关的调整。数据采集技术的原理图如下图所示:
感光传感器组由五个接收不同有效采集距离的感光传感器组成,自前而后分布于车载照明系统前端灯罩内侧,目的在于检测会车距离的长短,其中有效采集距离最长的感光传感器为感光传感器1,其他传感器有效照明距离依次递减,感光传感器5有效采集距离最短。通常情况下,夜间行车路灯处于打开状态时,在非会车模式下,行车照明环境处相对稳定状态。在会车状态下,来车打开强光灯情况下,由于行车照明的突然增强而触发感光传感器1最先接收来车强光灯信号,其他感光传感器依次接受,会车时所有感光传感器都能采集来车强光灯信号。感光传感器组对来车强光灯信号逐级采集,将为强光灯、柔光灯、近光灯切换提供数据依据。当会车结束后,感光传感器组处于无信号接收状态,无输入信号情况下则重新启动强光灯辅助照明。
采用感光传感器组的优势在于当需要与多辆车会车情况,能够准确判断下一辆将要会车车辆的距离,从而为车载照明系统的自动控制提供信号采集基础。
2.灯光控制技术
灯光控制技术主要依靠制定灯光切换规则实现。通过从大量试验数据中挖掘出适合于通常情况驾驶者视觉情况的关联规则,并基于关联规则确定应用于强光灯、柔光灯、近光灯状态控制方式,最终实现车载照明灯控制的自动化与智能化。
关键规则采用经典的Apriori算法,以感光传感器组采集的照明信号为条件,以强光灯、柔光灯、近光灯状态控制结果为结果,建立关联规则。按照已采集数据挖掘的结果,总结出若干条车载照明系统控制规则,现举例说明。
规则1:IF“感光传感器1”状态为“接收信号”and“感光传感器2”状态为“接收信号”and“感光传感器3”状态为“无信号”and“感光传感器4”状态为“无信号”and“感光传感器5”状态为“无信号”,Then“强光灯”状态为“降低亮度”and“柔光灯”状态为“打开”and“近光灯”状态为“关闭”;
规则2:IF“感光传感器1”状态为“接收信号”and“感光传感器2”状态为“接收信号”and“感光传感器3”状态为“接收信号”and“感光传感器4”状态为“接收信号”and“感光传感器5”状态为“无信号”,Then“强光灯”状态为“关闭”and“柔光灯”状态为“关闭”and“近光灯”状态为“打开”;
规则3:IF“感光传感器1”状态为“无信号”and“感光传感器2”状态为“无信号”and“感光传感器3”状态为“无信号”and“感光传感器4”状态为“无信号”and“感光传感器5”状态为“无信号”,Then“强光灯”状态为“增加亮度”and“柔光灯”状态为“打开”and“近光灯”状态为“关闭”;
……
以上仅列出三种状态下的车载照明系统控制关联规则,其他情况在此不再详细叙述。
通过车载照明系统控制关联规则的挖掘与在控制器上的实现,可实现强光灯、柔光灯、近光灯状态控制,需要说明的是,不同驾驶员的对照明的适应性有所不同,系统可通过重新设定控制规则,从而满足不同驾驶员对行车照明的要求。
四、结论
本文以行车安全为出发点,基于LED设计了车载照灯及其相应的控制系统,有效地解决了行车时外界光线不断变化使司机的视线受到一定影响的问题,在节能、安全、智能等多角度有效提高驾驶的安全性和智能化。
[1]周求湛,吴丹娥,王淼石,等.基于微控制器的新型智能车灯控制系统的设计与实现[J].吉林大学学报(工学版),2009,39(2):480~483.
[2]鲍贺川,杨明.基于LIN总线的车灯控制系统设计[J].现代电子技术,2009,(23):213~216.
[3]叶彬强,舒挺,王承文,等.基于CAN/LIN总线的车灯控制系统的设计[J].重庆工学院学报(自然科学版),2007,21(11):38~42.
[4]马春红,王旭东,吕宝良,等.基于CAN/LIN总线的车灯控制系统的设计[J].哈尔滨理工大学学报,2006,11(1):115 ~118.
[5]刘胜,李刚炎,胡剑,等.SAEJ1939协议在客车车灯控制系统中的应用研究[J].微计算机信息,2007,23(7):26~28.
[6]高菲菲,王芸.基于CAN总线的车灯控制系统设计[J].机械工程与自动化,2008,(14):152~155.
[7]曹民,丁坤,肖文秀.外部车灯智能控制系统的设计及试验[J].上海交通大学学报,2008,42(4):547~552.
TP27
A
1006-5342(2011)10-0154-03
2011-08-26
广东省科技计划项目(2009CD058,2009CD078,2009CD079,2009CD080)
