1000kN/2500kNm锻造操作机吊挂装置仿真研究
2011-11-11张营杰房志远卫凌云范玉林王宏亮冯东晓韩炳涛
牛 勇,张营杰,房志远,卫凌云,范玉林,王宏亮,冯东晓,韩炳涛
(金属挤压与锻造装备技术国家重点实验室,陕西 西安 710032)
1 前言
锻造操作机具有重载、精密、高速、智能、柔性等特点,与自由锻造液压机协调作业,可以大大提高生产能力、产品精度、生产效率和材料利用率,降低能耗。操作机本体部分包括钳杆装置、吊挂装置、预应力机架、行走装置等。其中,吊挂装置直接决定锻造操作机的工作空间、负载特性及动态响应特性[1-3]。
ADAMS软件是目前世界上应用广泛、具有权威性的机械系统动力学仿真分析软件之一,已被广泛应用到航空、航天、兵器、汽车和机械制造等各个行业[1,4-5]。
本文基于动力学系统分析软件ADAMS,建立了1 000 kN/2 500 kNm锻造操作机吊挂装置的虚拟样机模型,分析了上升和倾斜运动时各部件的运动及受力情况,仿真结果可以为锻造操作机的设计制造提供指导。
2 1 000 kN/2 500 kNm锻造操作机吊挂装置介绍
1 000 kN/2 500 kNm锻造操作机采用平行四边形吊挂装置,三维模型如图1所示。该机构的特点是:吊挂装置中钳杆平行升降油缸斜置在墙板内侧,对称布置,可降低安装高度,节约空间,并增加钳杆提升高度;驱动转臂绕安装在两侧墙板上的铰轴转动,通过与转臂相联接的吊杆来带动钳杆装置上升或下降;由于采用的是平行四边形吊挂结构,钳杆中心线在升降运动过程中一直平行于水平面;倾斜缸位于转臂机构的上位,当倾斜缸进排液时,通过与转臂相联接的吊杆来带动钳杆后部上升或下降,从而使钳杆向下或向上倾斜。
本文计算夹持重量为1 000 kN、夹持力矩为2 500 kNm时,上升和倾斜运动中操作机各部件的运动及受力。根据实际生产需要,1 000 kN/2 500 kNm锻造操作机设计要求最大上升距离为2 000 mm,最大上倾角度为6°,最大下倾角度为10°,平升缸最大驱动力为4 500 kN,倾斜缸最大驱动力为4 000 kN。
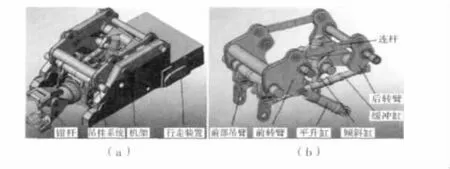
图1 1000kN/2500kNm锻造操作机三维模型(a)本体(b)吊挂系统
3 模型的建立
采用ADAMS软件进行系统分析一般包括几何建模、机构约束、施加载荷、仿真分析及调试和结果处理等步骤[5]。本文建立几何模型时,只考虑保证影响分析结果的主要尺寸,对细节尺寸不考虑。模型中的零部件及相互间约束见表1。

表1 模型中的约束副
4 仿真结果与讨论
4.1 平行升降运动
图2a为钳杆高度随平升缸伸长量的变化。分析表明,钳杆高度与平升缸伸长量存在近线性关系,这种近线性可以为工程应用提供便利。同时,钳杆最高可升高2 074 mm,满足设计要求。图2b为平升缸静平衡驱动力随平升缸伸长量的变化。分析表明,平升缸最大静平衡驱动力为2 191 kN,最小静平衡驱动力为2 045 kN,变化幅度为6.9%。平升缸静平衡驱动力随平升缸伸长量增大呈先增大后减小的趋势,这主要是由于随平升缸伸长量增加,平升缸与水平面夹角呈先减小后增大的趋势,如图2c所示。
4.2 倾斜运动
由于倾斜缸和钳杆夹角对钳杆倾斜角度以及倾斜缸静平衡驱动力的大小都有影响,因此首先分析钳杆处于水平位置时,平升缸伸长量对倾斜缸和钳杆夹角的影响,如图3所示。结果表明,钳杆和倾斜缸夹角随平升缸伸长量增加呈先减小后增大的趋势,变化幅度不大,并且在90°附近。本文研究钳杆处于最低位置、中间位置和最高位置时,倾斜角度和倾斜缸静平衡驱动力随倾斜缸伸长量的变化。

图4a所示为钳杆倾斜角度随倾斜缸伸长量的变化(伸长量正值表示倾斜缸伸长,伸长量负值表示倾斜缸缩短;倾斜角度正值表示上倾,倾斜角度负值表示下倾)。分析表明,钳杆位置对倾斜角度随倾斜缸伸长量的变化影响不显著;钳杆倾斜角度与倾斜缸伸长量存在近似线性关系,这种近线性可以为工程应用提供便利。同时,钳杆上倾角度最大值略大于6°,下倾角度略大于10°,满足设计要求。图4b所示为倾斜缸静平衡驱动力随倾斜缸伸长量的变化。分析表明,倾斜缸静平衡驱动力随倾斜缸伸长量增加呈减小的趋势,最大值小于1 950 kN,变化幅度小于200 kN。倾斜缸静平衡驱动力主要受钳杆重心位置和钳杆与倾斜缸夹角的影响,随倾斜缸伸长量增加,钳杆重心向倾斜缸一侧移动,所以倾斜缸静平衡驱动力减小。而倾斜缸静平衡驱动力还受到钳杆位置的影响。钳杆处于最低位置时,随倾斜缸伸长量增加,钳杆与倾斜缸夹角从113°减小89.5°,如图4c所示。倾斜缸静平衡驱动力下降了193 kN,变化幅度为10.4%。钳杆处于中间位置时,随倾斜缸伸长量增加,钳杆与倾斜缸夹角从94.2°减小到79.4°,倾斜缸静平衡驱动力下降了 19.4 kN,变化幅度为1.1%。钳杆处于最高位置时,随倾斜缸行程增加,钳杆与倾斜缸夹角从98.2°减小到81.7°,倾斜缸静平衡驱动力下降了45 kN,变化幅度为2.8%。
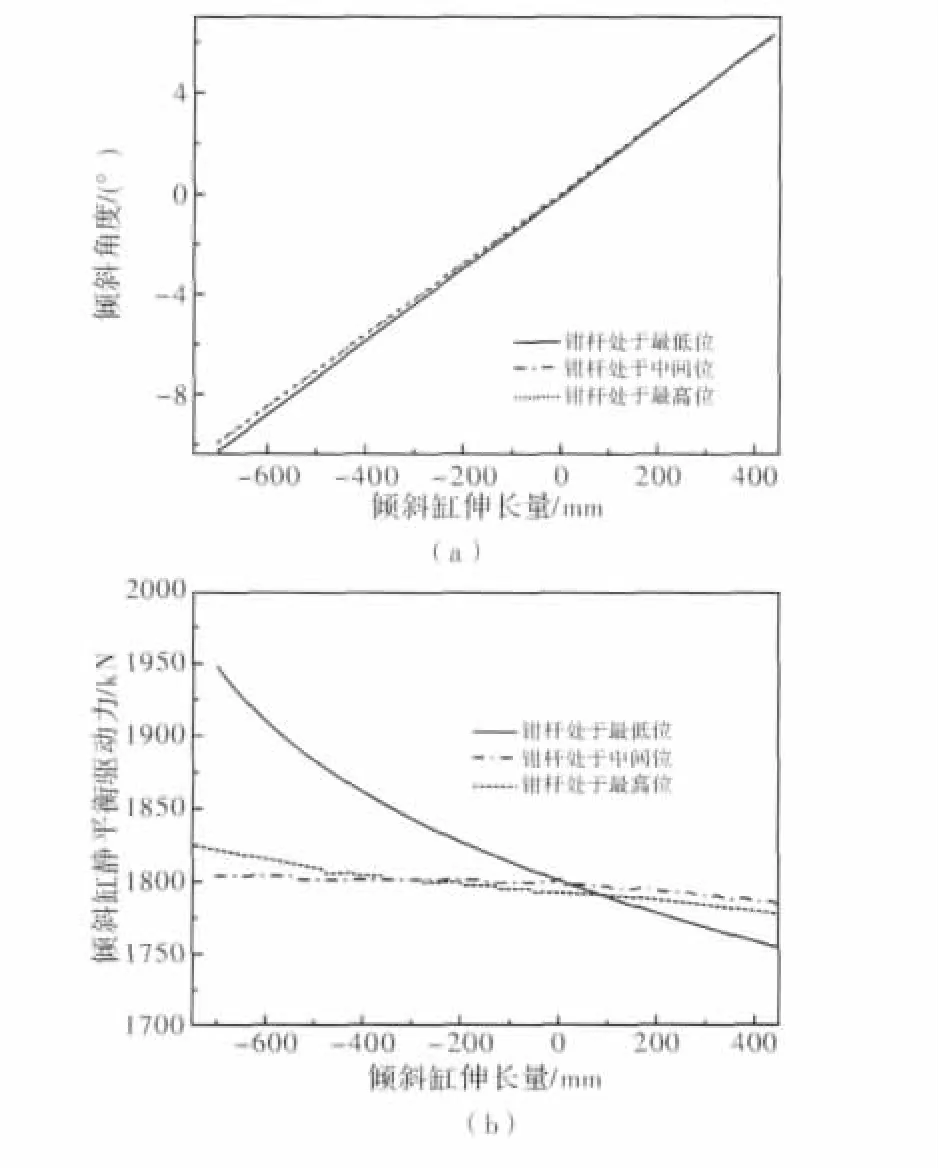
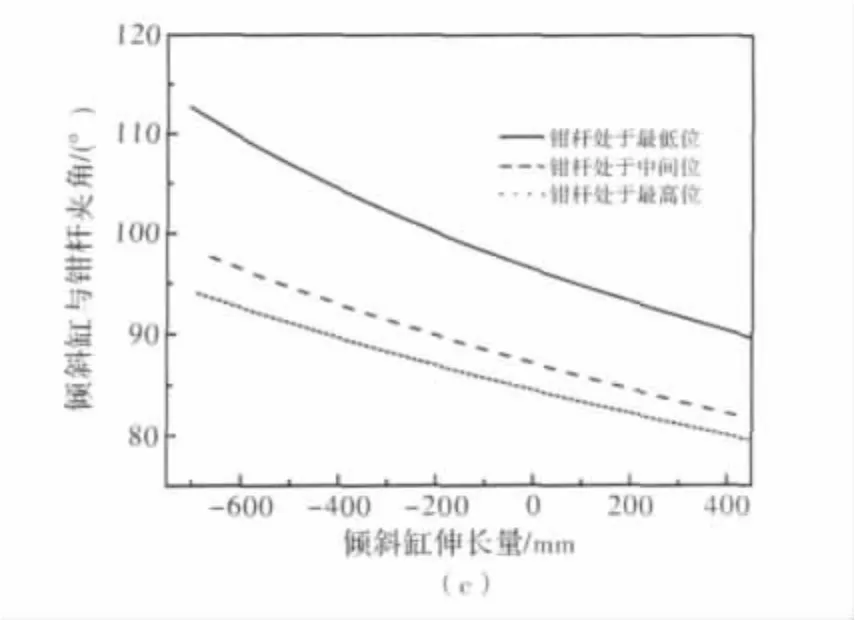
图4 倾斜运动
5 结论
本文研究了上升和倾斜运动时,1 000 kN/2 500 kNm锻造操作机吊挂装置主要部件的运动及受力情况。结果表明,钳杆最大平升高度、最大上倾和下倾角度、平升缸和倾斜缸静平衡驱动力均满足设计要求。平升缸静平衡驱动力随平升缸伸长量增大呈先增大后减小的趋势;倾斜缸静平衡驱动力随倾斜缸伸长量增大而减小。两组油缸驱动力变化幅度不大,系统运行平稳。
[1] 陈博翁,关立文,李铁民.基于ADAMS的锻造操作机动力学仿真及优化设计[J].机械设计与制造,2009,(3):6-8.
[2] 赵凯,王皓,陈关龙等.自由锻造操作机顺应过程分析[J].机械工程学报,2010,46(4):27-34.
[3] 余发国,高峰,郭为忠等.锻造操作机的回顾与展望[J].机械设计与研究,2007,(专刊):12-15.
[4] 李团结,朱超.基于虚拟样机技术的球形机器人运动仿真研究[J].系统仿真学报,2006,18(4):1026-1029.
[5] 郑健荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
