轴向磁悬浮轴承控制系统的可靠性研究
2011-11-09花榕泽赵言军潘礼正仇国富
陆 陈 花榕泽 赵言军 潘礼正 仇国富
南京理工大学 机械工程学院 (江苏 南京 210094)
轴向磁悬浮轴承控制系统的可靠性研究
陆 陈 花榕泽 赵言军 潘礼正 仇国富
南京理工大学 机械工程学院 (江苏 南京 210094)
研究了轴向磁悬浮轴承系统的控制问题。基于控制可靠和低成本的考虑,系统采用了差动式电容传感器检测轴位移,用基于脉宽调制的PID控制策略控制磁力线圈的工作。实验表明,该控制系统能实现快速、准确、稳定及可靠控制,保证轴向磁悬浮轴承的正常工作。
轴向磁悬浮轴承 电容传感器 脉宽调制 PID控制
磁悬浮轴承是一种利用可控电磁力使轴稳定悬浮起来的高性能新型轴承,与传统轴承相比,具有无机械摩擦、无需润滑、转速高、无污染、功耗低和寿命长等优点,在能源、交通、超高速超精密加工、航空航天、机器人等领域有着广泛的应用前景。
按磁场力的提供方式,磁悬浮轴承可分为主动式、被动式和混合式3类,目前应用最广泛的是主动式磁悬浮轴承。主动式磁悬浮轴承主要由机械结构和控制系统两部分组成,机械结构包括定子、轴和电磁力线圈,控制系统由位置检测传感器、控制器、功率放大器等构成。工作时,电磁力线圈安装在定子上,轴悬浮在对称放置的电磁力线圈所产生的磁场中,位置传感器连续检测轴的位置变化情况并被转换成控制信号控制通过电磁力线圈的电流,从而改变电磁力,使轴动态维持其稳定悬浮位置,并达到一定的位置精度要求。
轴的位置检测是主动式磁悬浮轴承的重要部分,其性能关系到系统对转子位置的控制精度。目前大多数磁悬浮轴承系统中均采用电涡流传感器检测磁悬浮轴承的位置,虽然电涡流传感器可以满足位置检测要求,但一般来说成本较高,结构复杂。磁悬浮轴承的控制也是非常关键因素,它需要一种具有快速响应能力的、稳定的闭环控制系统。
主要研究设计了一种轴向磁悬浮轴承的控制系统。根据轴向磁悬浮轴承的工作特点,基于控制可靠和低成本的考虑,该系统采用了差动式电容传感器检测轴位移,用基于脉宽调制的PID控制策略控制电磁力线圈工作,成功实现了对磁悬浮轴承的快速、准确、稳定及可靠控制。
1 轴向磁悬浮轴承工作原理
轴向磁悬浮轴承结构及控制系统工作原理如图1所示。
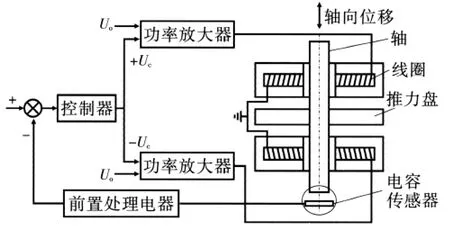
图1 轴向磁悬浮轴承工作原理
轴向磁悬浮轴承由两个定子和一个与轴连接在一起的推力圆盘及相应的控制系统构成。两个电磁力线圈分别安装在两个定子上并对称布置在推力圆盘的两边,当有适当的电流流过时,产生的电磁力吸引推力圆盘,从而使轴悬浮。当轴在外力扰动下偏离平衡位置时而有轴向位移时,由电容传感器检测出轴向位移变化,经测量电路处理后与给定的位置信号比较,差值信号送入控制器中,控制器产生两个同步的差动控制信号分别送入两个功率放大器控制流经电磁力线圈的电流,相反的改变电磁力的大小(若一个增大则另一个减小),使轴的轴向位置受到精确控制而保持悬浮。
2 差动电容位移传感器结构及检测原理
磁悬浮轴承是根据轴的悬浮状态不断地调节电磁力的大小才使轴实现稳定的悬浮,这就要求对轴的位移进行实时检测。为了提高磁悬浮轴承的性能和承载能力,轴和定子的间隙极小,一般在微米的量级。因此,轴的位移检测系统非常关键,要具有高精度、高分辨力、高稳定性和快速响应能力。
电容式传感器具有很高的位移检测灵敏度和高分辨率,响应快速,而且结构简单、成本低廉,检测电路也不复杂。根据轴向磁悬浮轴承的工作特点,电容式位移传感器安装也容易实现。因此,基于检测灵敏、控制可靠和低成本的要求,在轴向磁悬浮轴承中采用电容式传感器检测位移比目前大多数磁悬浮轴承系统中采用的昂贵的电涡流位移传感器具有更大的优势。
根据平行板电容公式:

式中 ε—极板间介质介电常数;
S—极板相对面积;
d—两平行板极间距离。
电容传感器检测位移时一般采用变面积 (S)或变极距(d)原理。考虑到在轴向位移很小的情况下,变极距式检测灵敏度较高,因此采用变极距测量原理,保持S、ε不变,将轴位移(d)转换为电容C的变化。另外,进一步考虑到克服非线性、提高灵敏度和抗干扰要求,采用了差动电容结构。
用印制板制造技术制作了如图2所示的同心圆环式电极,其中动电极用螺钉固定在轴的端部,两个固定电极装在磁悬浮轴承壳体上。为了减少引线电容影响,电容检测转换电路直接做在定极板上。整个电容位移传感器和检测电路均被封装在金属壳体内,以屏蔽外界电磁干扰,如图3所示。
采用的电容检测电路原理如图4所示。图4中,多谐振荡器产生一定频率的脉冲信号同时送给两路单稳态触发器,各单稳态触发器的单稳态脉宽时间tw与所检测到的电容值有关,而电容值的大小与电容极距有关。当位移变化引起电容极距变化时,tw发生变化,从而输出占空比变化与电容变化有关的等幅脉宽信号。两低通滤波电路将各脉宽信号转换成平均直流电压送入差动放大器放大,差动放大器输出电压的大小和极性分别反映了轴向位移的大小和方向,从而实现位移的检测。
图2 同心圆环式电极板
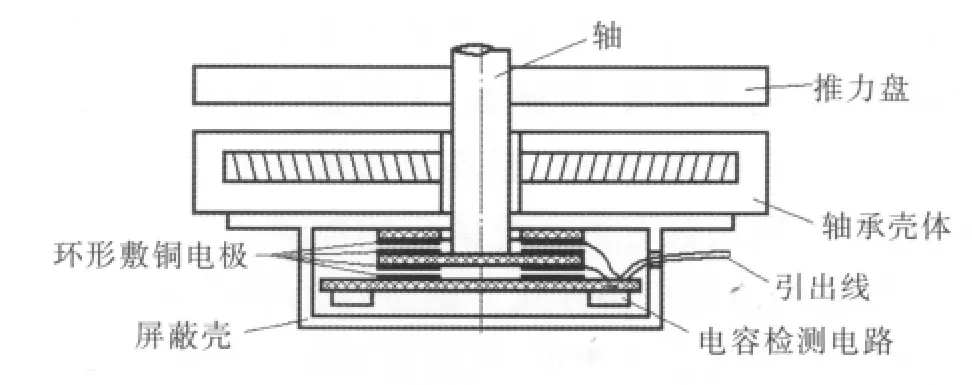
图3 电容传感器的安装
采用的电容传感器电极内环直径20mm,外环直径50mm,多谐振荡器频率取为5kHz,位移检测的灵敏度达到了2.6mV/μm。
3 轴向磁悬浮控制技术研究
对于轴向磁悬浮轴承,轴的稳定悬浮是一个受控的动态平衡过程,是根据轴在受载情况下位移的变化,不断调整上下电磁线圈对推力盘的吸引力实现的。如果控制动作过于频繁,容易使轴发生振荡。电磁线圈吸引力的大小由流过线圈的电流大小决定,一般磁悬浮控制系统中采用功率放大器来给电磁线圈提供电流。功率放大器的作用相当于可控恒流电源,其结构复杂、设计要求高。
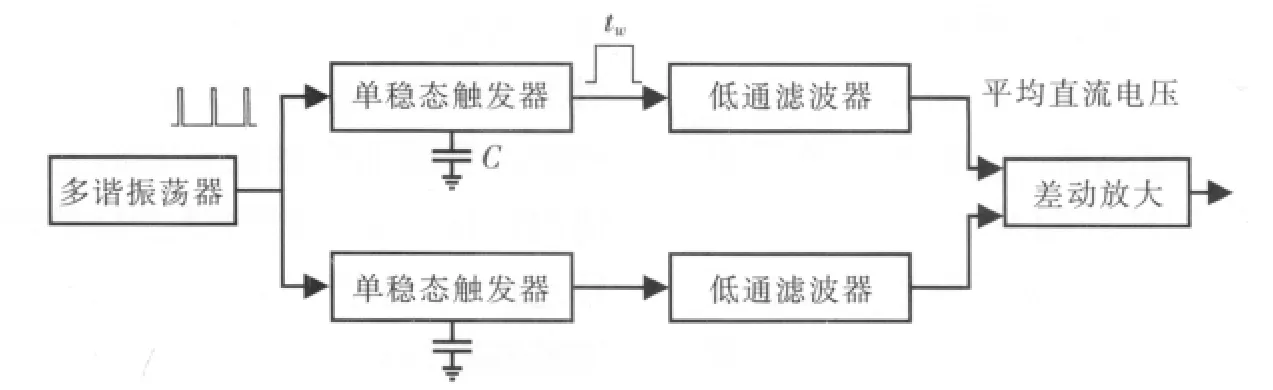
图4 电容检测电路原理
研究设计的轴向磁悬浮控制系统结构如图5所示。该控制系统采取PID控制策略,用简单方法实现功率放大器功能,完全由硬件电路完成对轴的悬浮控制。这样既保证了系统的快速、可靠的控制,又可降低系统成本。
图5中,两个受脉宽信号控制的开关电路与一个电压源构成了两路功率放大器。直流电压经两个开关分别直接加在上下电磁线圈上,通过调整频率固定的脉宽信号的占空比来控制开关电路的导通时间,从而控制上下电磁线圈中平均电流(功率)大小,达到调整上下电磁线圈吸引力的目的。
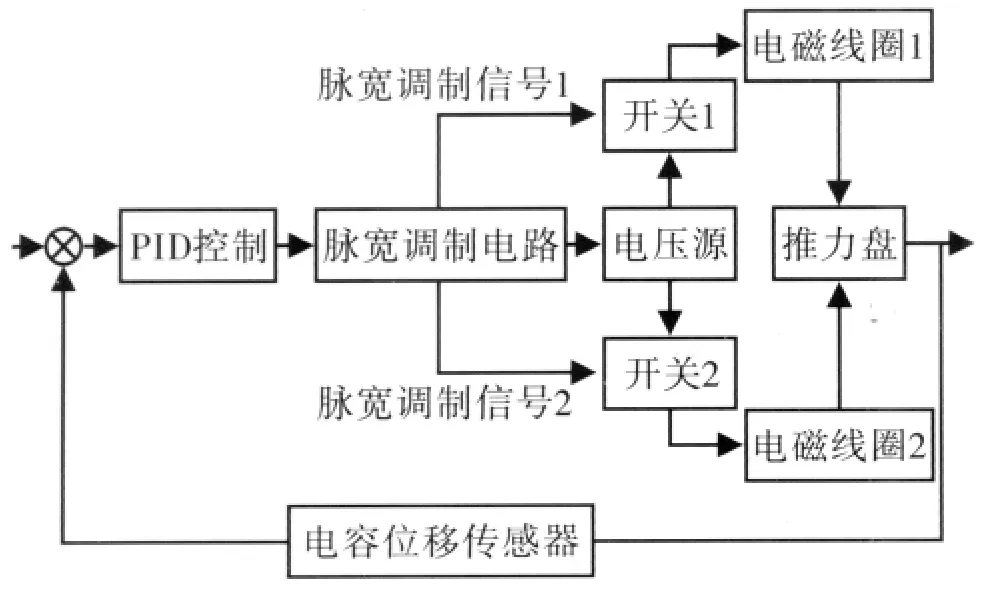
图5 控制系统结构框图
此外,PID控制电路和脉宽调制电路实际上构成了控制器,其作用是对位移检测信号做适当处理并分别给出两路变化方向相反的脉宽调制控制信号控制开关电路的通断。
整个控制系统控制过程是,当轴在外力扰动下,偏离平衡位置向下运动时,PID控制电路和脉宽调制电路根据位移检测信号,控制脉宽调制信号1的占空比增大,脉宽调制信号2的占空比减小,从而增大上电磁线圈吸引力,减小下电磁线圈吸引力,使轴回归平衡位置;若轴偏离平衡位置向上运动,则减小脉宽调制信号1的占空比,增大脉宽调制信号2的占空比,改变上下电磁线圈的吸引力大小,控制轴向下运动,回归平衡位置。这样就实现了轴悬浮的动态控制。
PID参数整定的好坏不仅影响控制的质量,而且更会影响到控制器的鲁棒性,采用实验试凑法确定了PID控制电路的PID参数。
4 轴向磁悬浮轴承系统实验与结论
把轴向磁悬浮轴承放在平整的实验台上,用砝码加载,用千分表测量轴的位移。脉宽调制信号频率选为1.2kHz。
在常温下进行了空载、加10kg负载的静态试验,以及在10kg静负载情况下叠加或减少500g砝码的外界扰动实验。实验时,先在系统未工作情况下使千分表调零,然后测量轴在各种负载情况下的位移及其变动情况。实验数据如表1所示。
根据实验,无论是空载、加载或是有外界扰动情况下,轴的悬浮位置都很稳定,变化仅1μm左右。这表明,所研究设计的轴向磁悬浮轴承控制系统,能实现微米级高精度控制,具有很强的抗干扰能力及一定的承载能力,能稳定地、可靠地实现系统悬浮起来。而且,这种轴向磁悬浮轴承控制系统还具有结构简单、成本低廉的优点,能满足工业应用的要求。

表1 测量轴在不同负载下的位移实验数据 单位:μm
[1]Jams P.Lyons,Mark A.Preston,Ram Gurumoorthy.Design and Control of a Fault-tolerant Active Magnetic Bearing System for Aircraft Engines,Proceedings of 4th International Symposium on Magnetic Bearings,1994:449-454.
[2]M.Brunet,B.Wagner,Analysis of Performance of an AMB spindle in creep feed grinding,Proceedings of the Fourth International Symposium on Magnetic Bearings,ETH Zurich,Switzerland,August,1994: 23-26.
[3]郭树涛.主动磁悬浮轴承的工作原理及发展趋势[J].重庆科技学院学报:自然科学版,2006(4):47-48.
[4]周旭.现代传感器技术[M].北京:国防工业出版社,2007.
[5]曹建荣,虞烈,谢友柏.主动磁悬浮推力轴承的状态反馈线性化控制[J].西安交通大学学报,2000,34(10):67-71.
[6]腾青芳.优化设计非线系统PID控制器的方法[M].兰州交通大学学报,2002,21(3):60-63.
The study focuses on the controlling problem of axial magnetic bearing system.In view of the reliability and the cost of control,the system adopts the differential capacitive sensors to detect the axial displacement,and also uses the PID strategy based on the pulse-width modulation to control the magnetic coil work.The experiment shows that this system can realize the rapid,accurate, stable and reliable control and guarantee the normal work of axial magnetic bearing system.
axial magnetic bearing;capacitive sensors;pulse-width modulation;PID control
张箫铃
2011-02-07
