一种判定螺旋传动方向的新方法研究
2011-11-07刘源
刘源
(重庆大学机械工程学院,重庆400044;重庆电子工程职业学院,重庆401331)
一种判定螺旋传动方向的新方法研究
刘源
(重庆大学机械工程学院,重庆400044;重庆电子工程职业学院,重庆401331)
螺旋传动具有省力和自锁两大特性,常被用于各类起重或加压装置、夹具以及调整测量机构中。而在螺旋机构的设计中,螺旋传动的方向判定尤为重要。在以往的螺旋传动方向判定中,多采用的是“左右手定则”来判断,此方法在判定不同种类的螺旋运动时,所获得的结论也会不同,易引发理解错误及概念混淆。本文从螺旋传动原理入手,分析出关于螺旋传动在方向判断上的一种新解法,并利用实例讲解该方法的使用及其与“左右手定则”的比较判定,从中得出该方法具有简单易懂,便于记忆的优点。
螺旋传动;方向判定;左右手定则
1 引言
“螺旋传动是利用螺杆和螺母组成螺旋副来实现传动要求的。其主要功能是将回转运动转变为直线运动,并传递运动和动力。”[1]因螺旋传动具有省力和自锁的两大特性,常被用于各类起重或加压装置、夹具以及调整测量机构中。
“螺旋传动根据螺杆与螺母的相对运动关系,可分为以下四种运动形式:(1)螺母固定不动,螺杆回转并作直线运动;(2)螺杆固定不动,螺母回转并作直线运动;(3)螺杆[2]回转,螺母作直线运动;(4)螺母回转,螺杆作直线运动。”
在目前关于螺旋传动的方向判定,主要采用的方法为“左右手定则”,即右旋螺纹用右手,左旋螺纹用左手判定。四指弯曲的方向表示螺杆或螺母的转向,大拇指的指向即为螺杆或螺母的移动方向。采用此种方法判定上述4种运动形式时,1、2两种运动形式可以判得正确运动方向,但3、4两种运动形式的实际方向与判定结果相反。这样造成学生在判定螺旋传动的方向时,容易产生混淆,发生错误。在教学中,也易造成学生将螺旋传动的方向判断与蜗杆传动和斜齿轮传动的受力判断混为一谈,引起错误。
2 螺旋传动方向判定新解
在生活中,我们都知道,如果要将一颗螺钉拧进桌子,从空中垂直于桌面的方向上看,是应该顺时针旋转螺钉,才可将其拧入桌内,逆时针则为退出。而生活中,我们所使用的螺纹件多为右旋螺纹,由此可得结论:
(1)杆转:(螺钉上为外螺纹,视其为螺杆,螺钉旋转即杆转)
(2)右:(右旋螺纹)
(3)顺:(顺时针旋转)
(4)近:(从上往下看,可将螺钉头与桌面视为头部,二者距离在逐渐靠近)
也即是:杆转、右、顺、近。
而当螺钉退出桌面时,二者头部为逐渐远离,即:杆转、右、逆、远。
如果需要将一颗螺母拧入到螺钉中,在生活中,我们都应该知道,从螺钉头部向下看,需要将螺母逆时针旋入,也即为:母转(螺母旋转)、右、逆、近。
综合其他情况之后,我们可以得出这样的结果:
(1)杆转、右、顺、近
(2)杆转、右、逆、远
(3)杆转、左、顺、远
(4)杆转、左、逆、近
(5)母转、右、顺、远
(6)母转、右、逆、近
(7)母转、左、顺、近
(8)母转、左、逆、远
且结合上面所提到的4种运动形式来看,其中1、3两种运动形式,经验证后符合杆转(即1,2,3,4)的结果,2、4两种运动形式符合母转(即5,6,7,8)的结果。
另外,通过观察这8个结论,我们可以得出在已知任何三个条件下,即可判定出所需结果。比如,已知(杆转、右、顺)这三个条件,即可得到结论(近)或已知(杆转、顺、近)这三个条件,即可得结论(右),且在(杆转或母转、右旋或左旋、顺时针或逆时针、接近或远离)这4个条件下,任意的改变一个条件,即可得到结论改变;任意改变两个条件,结论不变;改变三个条件,结论又会改变。这样的话,只要我们记住生活中最基本的情况,也即是杆转、右旋、顺时针、接近,就可以推导出其他的变化情况。并且即使观察方向改变,也一样可以得到正确结果。
3 螺旋传动方向判定应用
3.1 应用1
如图1所示,一机床刀架进给机构(右旋),螺杆转向如图,试求B物体移动方向。
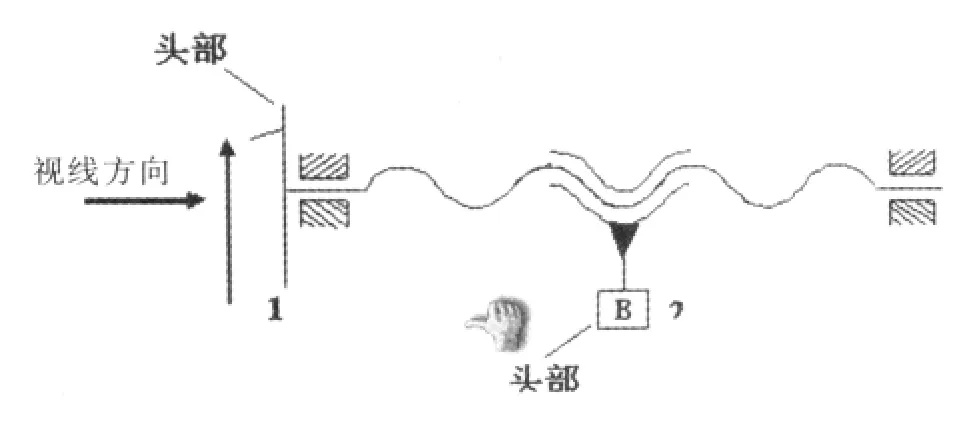
图1 机床刀架进给机构
(1)采用“左右手定则”:因图1为右旋螺纹,故用右手,4个手指弯曲方向与图示转向保持一致,大拇指指向即为移动方向,由此得B物体水平向左移动。
(2)按新解法。根据图示情况可得:杆转,右旋,按视线方向可得杆按逆时针转动。即杆转、右旋、逆时针、结论为(远)。杆被机架固定,不能移动,故应为B物体向右移动。
由此可得2种方法结论相反,而这2种方法都没有错,为什么所得结论不同呢?仔细观察后,会发现此图所示运动形态与前面所说的第3种运动形态相同,即螺杆回转,螺母作直线运动。而在此种情况下,用“左右手定则”判定的结果会与实际方向相反。即B物体实际应向右移动。在实际工作中,采用“左右手定则”常常会因为忽略了运动形态,而导致判断错误。而用新解法则不论螺纹件是何运动形态,都不易出现错误。
2.2 应用2
如图2所示,一右旋单螺旋机构,螺杆转向如图,试求螺杆1移动方向。

图2 单螺旋机构
(1)由视线方向1看该机构,所得螺杆转向为逆时针,且为杆转,右旋,因此可得结论为远离。即头部1与头部2远离。由于2为机架(固定不动),故判得1螺杆的移动方向如图水平指向左。
(2)由视线方向2看该机构,所得螺杆转向为顺时针,且为杆转,右旋,因此可得结论为接近。由于此时视线关系,螺杆1的尾部变为头部3(即与视线最接近的物体部位视为头部)。依照结论,此时头部3与头部2接近,由于2为机架(固定不动),故判得1螺杆的移动方向如图水平指向左。
由此可看出,不论从物体的哪一端观察,采用此方法都可以得出相同结果。
2.3 应用3
如图所示一螺旋机构,已知B处螺旋副为右旋螺纹,导程SB=3.0mm,现欲使2螺母按图示方向旋转一圈,1螺杆上升0.1mm,试求A螺旋副的旋向与导程SA。
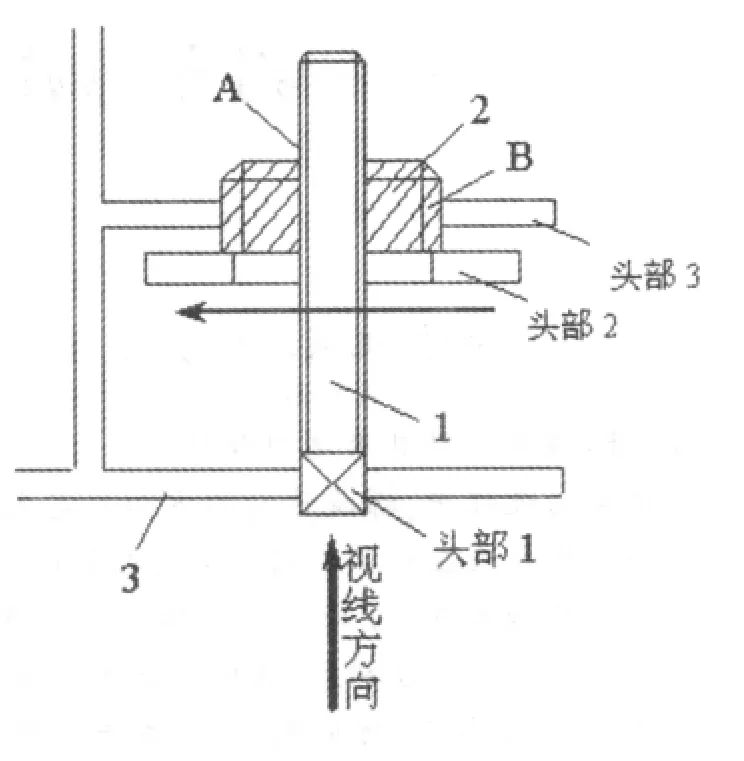
图3 双螺旋机构
如图3所示为一双螺旋机构,由视线方向看:2螺母的转向为逆时针,B副为右旋,且在B螺旋副处2螺母上为外螺纹,故为杆转,因此得杆转、右旋、逆时针、结论为远离,故头部2与头部3远离,因3物体为机架固定不动,所以2螺母应向下移动,并带动1螺杆向下移动。而题中所要求为1螺杆上升0.1 mm,故1螺杆必须相对2螺母上升,也即是头部1与头部2接近。且2螺母与1螺杆配合时其上为内螺纹,故为母转。且由视线方向看,2的转向为逆时针。所以所得情况为(母转、逆时针、接近),由此推出结论,A处为右旋,因A、B两处螺旋副皆为右旋,故该机构为差动螺旋机构。代入差动螺旋求解公式,求解SA:设SA方向为正。
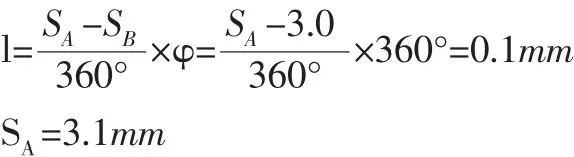
故得解:A螺旋副的旋向为右旋,导程SA=3.1mm。
4 结论
掌握螺旋机构的方向判定,也即是掌握螺旋机构的基本运行原理,对于螺旋机构的设计具有非常重要的意义。本文所介绍的螺旋机构方向判定的新方法,是根据螺旋传动的4大要素(回转零件,螺纹旋向,回转方向,移动方向)来提出的,在实际判断中,只需记忆最常见的(杆转,右旋,顺时针,接近)这4条即可。当实际工作条件改变时,所求结果也随之改变。任意改变一个条件,即可得到结论改变;任意改变两个条件,结论不变;改变三个条件,结论改变。采用此方法可以在已知任何三个条件的情况下,求出所剩的另一个条件,不仅可以求螺旋传动方向,还可以求回转方向或螺纹件旋向等情况,具有简单易懂,便于记忆的优点,在实际教学中,取得了较好的效果。
[1]陈立德.机械设计基础[M].北京:高等教育出版社,2008.
[2]唐金松.简明机械设计手册[M].上海:上海科学技术出版社,2000.
责任编辑 李燕
TH16
A
1674-5787(2011)01-0165-02
2010-09-30
刘源(1972—),男,重庆市人,重庆电子工程职业学院,讲师,现就读于重庆大学机械工程学院高师硕士班。
