TCSC自适应Terminal滑模稳定控制器设计①
2011-10-30王宝华邹德虎
王宝华, 邹德虎
(南京理工大学动力工程学院, 南京 210094)
TCSC自适应Terminal滑模稳定控制器设计①
王宝华, 邹德虎
(南京理工大学动力工程学院, 南京 210094)
该文设计了一种TCSC自适应Terminal滑模稳定控制器,以提高互联电力系统的稳定性。文中建立了含TCSC的两机电力系统的数学模型;控制器设计应用了Terminal滑模控制理论,使误差能够快速收敛,从而取得良好的控制效果;设计中考虑了阻尼参数的不确定以及外扰动的影响;利用MATLAB进行了两机系统的仿真。仿真结果表明,所设计的TCSC自适应Terminal稳定控制器能够快速阻尼功率振荡,提高互联电力系统的稳定性,且效果优于基于逆推法设计的TCSC稳定控制器。
可控串联补偿; 滑模控制; 自适应; 电力系统; 稳定性
可控串联电容补偿TCSC(thyristor controlled series compensation)技术可以连续性地调整线路电抗,从而改善潮流分布、提高系统稳定性,以及抑制次同步振荡[1]。TCSC用于系统稳定控制时,可将内部结构简化处理,等效为一阶惯性环节[2]。
TCSC稳定控制的方法很多。文献[3]将直接反馈线性化与H∞理论结合,设计了TCSC多目标 控制器。文献[4,5]采用逆推法设计了具有鲁棒性的TCSC控制器。文献[6]从物理意义出发,直接构造能量函数,设计TCSC稳定控制器。文献[7,8]将模糊控制引入TCSC的设计中。此外,近年来预测控制[9]、非线性PID控制[10]、基于线性矩阵不等式的鲁棒控制[11]等都应用到TCSC稳定控制领域。文献[12]设计了利用惯量中心信号的多机系统TCSC控制器。
电力系统是强非线性系统,存在不确定参数以及大量不确定扰动,因此要求控制器具有鲁棒性。滑模变结构控制作为一种不连续的控制手段,在受到外干扰和参数摄动情况下具有很强的鲁棒性[13],非常适合在电力系统中应用。而Terminal滑模控制通过在滑模面的设计中引入非线性函数,使得误差能够快速收敛,是对普通滑模控制的改进。因此本文采用Terminal滑模控制设计TCSC稳定控制器,同时针对发电机阻尼系数难以准确量测的特点,设计了估计阻尼的自适应律。通过李亚普洛夫理论证明了控制器的稳定性和鲁棒性。仿真结果表明所设计的Terminal稳定控制器的效果优于基于逆推法设计的TCSC稳定控制器。
1 数学模型
假定TCSC装设在两区域系统的联络线上,则可以等效为等值的两机系统,如图1所示。

图1 含TCSC的等值两机系统Fig.1 Two-machine system including TCSC
根据文献[3],系统的数学模型可以表示为如下的形式:
(1)
式中:δ1、δ2、ω1、ω2、Pm1、Pm2、Pe1、Pe2分别为两台发电机的功角、转子角速度、机械功率、电磁功率。ε1、ε2为外干扰。
将TCSC动态等效于一阶惯性环节,则有
(2)

令:δ=δ1-δ2-(δ10-δ20),ω=ω1-ω2。有
(3)
对不确定部分处理,得:


(4)
为了设计过程的简便,做下面的坐标变换:
(5)
则系统可以表示成下面的形式:
(6)
式中:


φ(x)=x3
ε′是ε的导数,假定|ε′|≤ρ。
2 控制器设计
首先选择Terminal滑模面[14]。
令:
s0=cx1+x2
(7)
(8)
式中:c,α,β>0,q0和p0为正奇数。
对式(8)求导,可得:
cx3+f(x)+g(x)u+φ(x)θ+ε′+

(9)
令控制规律为
ρsgn(s)+φs+γsq/p]
(10)
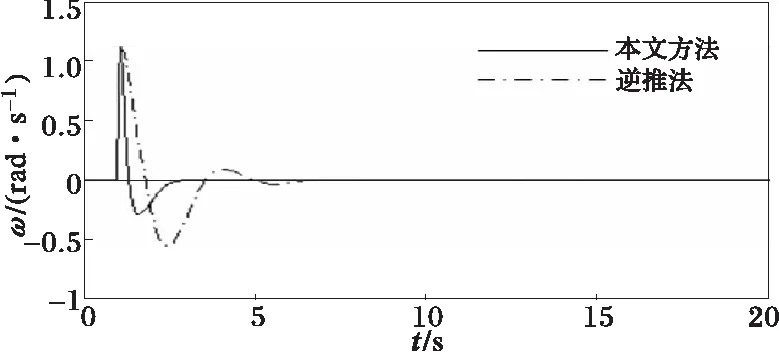
式中:φ,γ>0,p和q为正奇数,且q 令参数θ的自适应估计规律为 (11) 式中:r>0,为自适应增益系数。 下面证明系统的稳定性。 将式(10)代入式(9),得: ε′-ρsgn(s) (12) 构造李亚普诺夫函数: (13) 求导得: ε′s≤-φs2-γs(q+p)/p 根据文献[3],式(10)、(11)所涉及的量可以通过本地量的测量和计算得到,可以实现控制器的实用化。 仿真时假定t=1 s时,某条线路发生三相接地短路,0.1 s后故障消失。 仿真时考虑了阻尼参数不确定性以及TCSC输出电抗的限幅。仿真工具为MATLAB。 仿真结果见图2,实线是本文方法所得到的波形,虚线是采用TCSC逆推控制器所得的波形。 由波形可以看出,TCSC自适应Terminal滑模稳定控制可以迅速使系统稳定到平衡点,抑制功率振荡,可以明显提高互联电力系统的稳定性,且效果优于逆推控制。 (a) 两台发电机的功角差 (b) G1的相对转子角速度 (c) G2的相对转子角速度图2 三相短路时的响应曲线Fig.2 Dynamic response under three phaseshort-circuit fault 本文将Terminal滑模控制理论应用于TCSC稳定控制器的设计中。设计过程中考虑了参数不确定以及外扰动的影响,利用自适应增益控制实时估计不确定阻尼。通过李亚普洛夫理论证明了控制系统的稳定性和鲁棒性。仿真结果表明,TCSC的自适应Terminal滑模控制器可以有效提高系统稳定性,抑制功率振荡。 [1] 康海燕,王西田(Kang Haiyan,Wang Xitian).TCSC 次同步频率阻抗特性及其抑制SSR 的参数设计(Subsynchronous frequency impedance characteristics of TCSC and its parameter design for mitigating SSR)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2008,20(5):91-96. [2] 周孝信,郭剑波,林集明,等.电力系统可控串联电容补偿[M].北京:科学出版社,2009. [3] 陈菊明,梅生伟,刘锋(Chen Juming,Mei Shengwei,Liu Feng).多机系统TCSC多目标H_∞控制器设计(The design of multi-objective H_∞ controller for TCSC in multi-machine system)[J].电力系统自动化(Automation of Electric Power Systems),2000,24(21):11-13,18. [4] 王宝华,杨成梧,张强(Wang Baohua, Yang Chengwu, Zhang Qiang).TCSC自适应逆推控制器设计(Design of adaptive backstepping controller for TCSC)[J].电力自动化设备(Electric Power Automation Equipment),2005,25(4):59-61. [5] 王宝华,杨成梧,张强(Wang Baohua, Yang Chengwu, Zhang Qiang).多机系统TCSC逆推鲁棒控制器设计(Design of backstepping robust controller for TCSC in multi-machine system)[J].电工技术学报(Transactions of China Electrotechnical Society),2005,20(1):108-111,103. [6] Colvara Laurence Duarte , Araujo Silvio Cesar Braz , Festraits Ednilton Bressan.Stability analysis of power system including facts (TCSC) effects by direct method approach[J].International Journal of Electrical Power and Energy Systems,2005,27(4):264-274. [7] Fang D Z, Xiaodong Y,Wennan S,etal.Oscillation transient energy function applied to the design of a TCSC fuzzy logic damping controller to suppress power system interarea mode oscillations[J].IEE Proceedings: Generation, Transmission and Distribution,2003,150(2):233-238. [8] 王辉,韦泽垠,王耀南(Wang Hui,Wei Zeyin,Wang Yaonan).可控串补自适应模糊阻尼控制策略研究(Study of self-adaptive fuzzy damping control strategy of TCSC)[J].电力自动化设备(Electric Power Automation Equipment),2006,26(10):13-16. [9] Jiang Tiezheng,Chen Chen.A design method of nonlinear optimal predictive controller for thyristor controlled series compensation[J].Electric Power Systems Research,2006,76(9-10):753-759. [10]郑旭(Zheng Xu).基于反馈线性化的TCSC非线性PID控制(Nonlinear PID controller for TCSC based on feedback linearization)[J].电力自动化设备(Electric Power Automation Equipment),2006,26(9):86-88. [11]杨洋,张建成(Yang Yang,Zhang Jiancheng).利用LMI技术设计多机系统TCSC鲁棒控制器(Robust TCSC controller design based on linear matrix inequality for multi-machine power system)[J].电力自动化设备(Electric Power Automation Equipment),2007,27(5):105-109. [12]Cai Zexiang,Zhu Lin,Lan Zhou,etal.A study on robust adaptive modulation controller for TCSC based on COI signal in interconnected power systems[J].Electric Power Systems Research,2008,78(1):147-157. [13]刘金琨.滑模变结构MATLAB仿真[M].北京:清华大学出版社,2005. [14]Yu Xinghuo, Zhihong Man.Fast terminal sliding-mode control design for nonlinear dynamical systems[J].IEEE Trans on Circuits and Systems,2002,49(2):261-264. DesignofAdaptiveTerminalSlidingModeControllerofTCSCforPowerSystemStabilityEnhancement WANG Bao-hua, ZOU De-hu (School of Energy and Power Engineering, Nanjing University of Science and Technology,Nanjing 210094, China) An adaptive terminal sliding mode controller for TCSC is designed in order to improve the stability of interconnected power systems. A mathematical model of two-machine power system with TCSC is established. Terminal sliding mode control theory is applied to controller design, so that the fast convergence of errors can be realized to achieve good control effect. The impacts of uncertainty of parameters and external disturbances are also considered during the controller design. The simulation results of two-machine system using MATLAB show that the terminal sliding mode controller can damp power oscillation quickly and improve the stability of interconnected power systems, and the effect is better than the backstepping controller. thyristor controlled series compensation(TCSC); sliding mode control; adaptive; power system; stability 2009-12-29 2010-04-07 TM712 A 1003-8930(2011)04-0111-04 王宝华(1968-),男,副教授,博士,研究方向为电力系统分析与非线性控制。Email:wangbaohuaa@sohu.com 邹德虎(1986-),男,硕士研究生,研究方向为电力系统稳定控制。Email:zoupaper@163.com


3 数值仿真



4 结论
