基于门口检测策略的灭火机器人的设计
2011-10-26周兆匡湖南省岳阳市第一中学414000任胜兵中南大学软件学院410075
周兆匡 湖南省岳阳市第一中学 414000任胜兵 中南大学软件学院 410075
基于门口检测策略的灭火机器人的设计
周兆匡 湖南省岳阳市第一中学 414000任胜兵 中南大学软件学院 410075
依据机器人灭火比赛规则,本文设计基于门口检测策略的灭火机器人,在已有机器人的基础上对各种传感器进行科学布局,实现火源门口检测功能。主要实现了避障、寻火、灭火和回家四个模块。实验表明本文的灭火策略的灭火时间大大缩短。
引言
随着信息科技的迅速发展,使得人们生活工作发生天翻地覆的变化。为了拉近中小学生与现代信息科技技术的距离,国家颁布了普通中小学校信息技术课程标准。在从事现代信息科技技术教育的过程中发现,机器人教育涉及了信息技术几乎所有的内容,不仅让学生接触到最新的信息技术,而且让学生充分发挥想象力来开发新的智能机器人,从而培养学生对信息技术的开发及创新能力。为了推动中小学机器人教育的发展,国内推出了大量不同类型的机器人比赛。机器人灭火是中小学机器人比赛中最引人注目的项目之一,不仅可以提高中小学生的机器人组装能力,还可以提高中小学生的编程能力及创新能力。
由于中小学生的设计能力有限,目前主要采用国内机器人厂商开发的机器人参加机器人灭火比赛。在比赛中取得了一些成绩,但是成绩的好坏取决于厂商开发的机器人的水平。为了在机器人灭火比赛中获取更好的成绩,本文在现有的机器人基础上进行二次开发,采用门口探测的灭火策略,大大提高了机器人灭火的效率。
1 机器人灭火比赛规则
目前国内中小学生机器人灭火比赛规则完全采用国际比赛规则,模仿现实生活中的消防队员灭火的情景,让机器人在有4间平面结构的模型房子中,自主寻找任意放置的蜡烛,并将其熄灭[1]。 机器人灭火比赛场地平面结构图如图1所示。
图1中的比赛场地的墙壁高33cm,厚2cm,由木板做成的且为白色。比赛场地的地板均被刷为黑色的光滑的木质表面。机器人将从一个标有“H”的起始位置的圆圈开始,而且必须在圆圈中启动。场地中所有的走廊和每个房间的门口都是46cm宽,门槛上没有门。而且房间的入口用2. 5cm宽的白线表示。机器人的整体外形尺寸在出发前和任务完成后都应该在标有“H”的正方形区域。有效的灭火范围也是用白色的圆圈表示。
按照国际机器人灭火比赛的标准,得分越低,成绩越好。目前有6种运行模式可供选择。不同模式的得分系数也各不相同,标准模式得分系数为1.0;声音启动模式的得分系数是0.95;回家模式的得分系数为0.80;家具模式的得分系数为0.75;灭火模式,使用风扇吹风灭火的得分系数为1.0,不使用吹风灭火的方式将火灭掉系数为0.85;搜索房间数目越多,系数越少,得分越低。最终的实际得分=实际时间×启动模式系数×房间系数×搜救系数×回家系数。
2 基于门口探测策略的灭火机器人的设计
为了满足机器人灭火比赛的功能要求,本文采用了门口探测策略来设计灭火机器人,即如果房间无火则不进房间搜索的方法。根据嵌入式系统开发原理,将灭火机器人系统设计划分为系统硬件设计和软件设计两个部分。硬件设计部分主要完成机器人探测火焰、防碰撞任务所需的传感器配置工作。软件设计部分完成机器人灭火探测策略。
2.1 灭火机器人硬件设计
本文设计的灭火机器人硬件结构由微控制器、传感器模块、电源模块、系统驱动模块、灭火装置及声控模块等组成,其总体结构如图2所示。
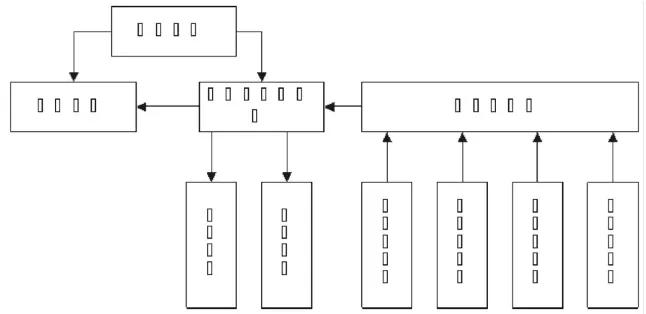
图2 灭火机器人硬件系统结构
图2描述了灭火机器人硬件系统结构。为了尽可能地节约开发成本,以学校目前已有的某灭火器机器人控制器、驱动模块、灭火装置为基础,添加合理的传感器组合及声控模块来完成机器人硬件设计。
传感器用于实时监测周围环境信息,描述机器人与环境的相互关系[2]。根据比赛规则,机器人主要使用红外传感器、火焰传感器、灰度传感器、温度传感器及相应的信号处理电路。声控模块主要是启动机器人,微控制器模块将从传感器获取的信息进行分析,来驱动机器人的驱动模块,以避免碰撞或前进等。当探测到火焰后,控制器启动灭火设备灭火,然后回到起始位置。
红外传感器主要是用来检测障碍物,避免碰到墙壁以及寻找房间的门,也称距离传感器(PSD传感器)。红外传感器可以检测的范围为10cm~80cm。通过发射红外线和接受发射回来的红外线来确定离障碍物的距离。
火焰传感器用来探测和追踪火源,在灭火比赛中主要用于寻找火源。当测不到火焰时,输出电压约等于0,当传感器测到火焰时,输出电压为0.5~2.5V。通过控制器信息处理来实现火焰检测。对可见光和红外光的有效探测距离可达2m,探测角度为60度,线性度精确。因此越靠近热源,读数越小[3]。
灰度传感器属于光敏传感器,根据不同颜色的地面对光的反射程度的不同,通过比较电压来检测场地内的路标,以便准确找到房间门入口、火焰范围及终点处。
非接触式红外温度传感器用来寻找火源。通过周围环境与火焰温度的对比来判断火源位置。由于其反应速度快,价格低,因此采用火焰传感器和温度传感器对火源进行定位。为了便于实施门口检测策略,灭火机器人传感器分布如图3所示。
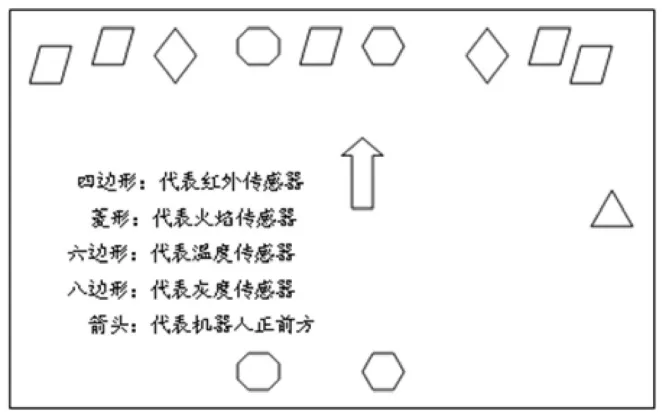
图3 灭火机器人传感器分布图
在图3中,左红外传感器接数字14口,左45度角红外传感器接数字8口,右红外传感器接数字15口,左右45度角红外传感器接数字10口,前红外传感器接数字9口,声控传感器接模拟3口,左、右火焰传感器分别接模拟4、5口,前、后灰度传感器分别接模拟6、7口,前、后温度传感器接模拟1、2口。
2.2 基于门口检测策略的灭火机器人软件设计
机器人的硬件配置决定了灭火机器人的最大的潜力,需要设计优秀的策略来充分开发这些潜能。为了在灭火比赛中节省时间,减少碰撞次数,提高比赛成绩,本文采用了门口检测策略。灭火比赛项目由避障、找火、灭火和回家四部分组成。该策略利用距离红外传感器,实现无碰撞行走;在找火阶段中,机器人通过灰度传感器检测每个房间入口的白线,然后利用火焰传感器和温度传感器快速寻找火源,如果找到火源,则启动灭火模块,如果没有找到火源则查找其他房间即无火不进房间;如果进入灭火阶段,则需快速精确定位火源,完成对火操作,灭火动作,最后返回到出发位置。其总体算法如图4所示。
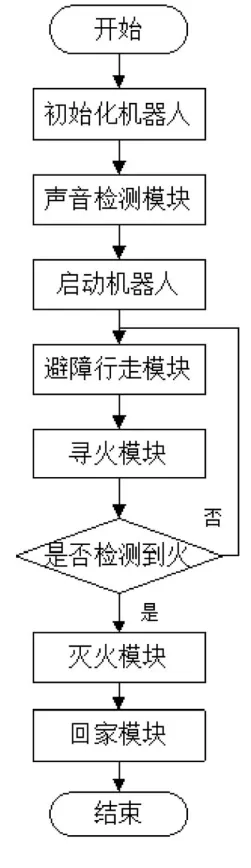
图4 总体算法流程图
2.2.1 机器人避撞阶级分析
灭火机器人主要通过获取多个距离红外传感器信号,判断周围障碍物的情况,从而控制机器人无碰撞行走。门口检测策略综合应用了左手、右手法则以及固定线路法来规避障碍物。以沿左墙走为例说明无碰撞行走算法。沿左墙行进示意图如图5所示。
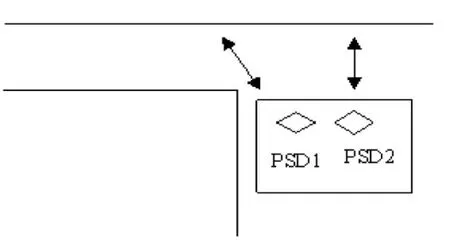
图5 沿左墙行进示意图
图5对应的沿左墙行走规则如表1所示,其中PSD1为左45度角红外传感器,PSD2为左红外传感器。
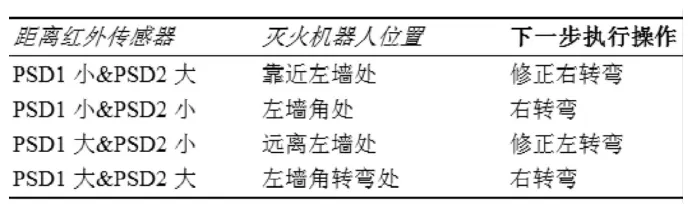
表1 沿左墙行进规则
从表1可见,通过设置多个条件判断,可以准确决定出机器人下一步运动方向,实现精确控制机器人行走,以避免与障碍物发生碰撞。右手行走法则情况与左手行走法则类似。
2.2.2 机器人寻找火源阶段分析
由于本文采用门口检测策略,需要在每个房间的门口探测是否存在火源,所以就必须确定房间的入口,也就是检测代表房间门口的白线。另外需要综合使用火焰传感器和温度传感器来探测火源的存在。本文使用前、后两个灰度传感器来检测白线。通过大量的实验得知白线的灰度值为85,地面灰度的长度为125。房间门口白线检测的条件判断语句如下:

即如果机器人前、后两个灰度传感器检测的灰度结果不同时,则说明机器人到了房间的门口处。
在到达房间门口处后,需要使用左、右火焰传感器和温度传感器来检测火源。首先需要确定机器人感应火源的火光的临界值,机器人灭火位置的临界值。通过大量的实验得知找到火光的临界值为989,蜡烛熄灭临界值为1000。火焰检测的条件判断语句如下:

即在房间门口将接收的灰度信息与临界值对比,以及判断前、后温度传感器值是否相同来判断该房间是否存在火源。
2.2.3 机器人灭火阶段分析
当找到存在火源的房间后,则进入灭火阶段。进行灭火之前,需要完成找到灭火的合适位置、灭火方向的校正两个任务。
为了有效地完成灭火任务,需要找到合适的灭火位置。另外不允许碰到蜡烛,机器人需要在蜡烛外围的白线处停止。则寻找合适灭火位置的条件判断语句如下:

到达了合适的灭火位置后,对灭火方向进行校正,需要根据左右火焰传感器的值进行校正。如果左边火焰强,像左多摇动一点;如果右边火焰强,向右多摇动一点;正对火焰,则启动风扇进行灭火,吹灭蜡烛。
2.2.4 机器人回家模式分析
在对火源进行灭火后,需返回且停在终止位置。如果在1号房间发现火源,则灭火后走右手法则回家;如果在4号房间发现火源,则灭火后走右手法则回家;如果在3号房间发现火源,则灭火后走左手法则回家;如果在2号房间发现火源,则灭火后先走左手法则,然后走固定直线线路返回到终止位置。则检测终止位置的条件判断语句如下:

如果机器人前后皆为白色且前面有墙壁,则停车。
2.2.5 机器人路径规划
在机器人灭火的四个阶段中,路径规划自始至终贯穿其间。灭火机器人在不同环境中需走出合适的路径(也就是控制转向问题)。为了实现门口检测策略,本文采用了左右手规则相结合的方法来走完全程。机器人灭火路径规划如图6所示。
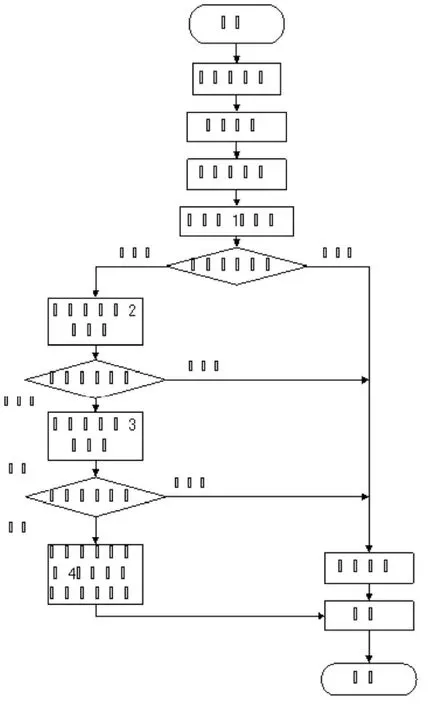
图6 灭火机器人路径规划
机器人最终按照图6中路径规划来依次实现避障、寻火及灭火操作,最终完成灭火任务。
3 实验测试结果分析
灭火比赛的任务是灭火机器人以最短时间找到火源,并将其扑灭。成功灭火并且用时最短者获胜。影响用时长短的因素包括直线调整次数、碰撞次数、正确转换次数、找准火源次数及成功灭火次数等。直线调整次数越少,碰撞次数越少,正确转换次数越多,找准火源次数越多,成功灭火次数越多,则灭火所用的时间越短[4]。在测试机器人过程中,进行大量的调试包括程序的修改和传感器位置的调整。
为了测试本文的策略方法,分别对4个房间进行3次灭火实验。记录并统计10组数据如表2所示。
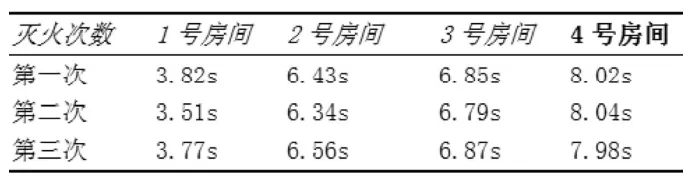
表2 实际灭火时间数据统计表
根据表2可见,灭火机器人遍历4个房间后,熄灭4号房间的火源,实际灭火时间大约为8s左右,接近于国内领先水平,其余房间实际灭火时间均在6.9s以下。实验表明采用门口检测策略的灭火机器人较采用其他一般算法的机器人灭火时间大大缩短,而且性能稳定可靠。
4 结论
依据国际灭火比赛的规则,设计了基于门口检测策略的灭火机器人。在已有机器人上对各种传感器进行合理、科学的分布,实现火源的门口检测,实现快速避障、寻火、灭火及回家操作。实验表明采用门口检测策略的机器人灭火速度快,大大提高了灭火成绩。
[1]张英. 机器人灭火的设计方案[J]. 西安邮电学院学报.2006,11(3):100-112
[2]鲍禹,等. 基于MSP430控制芯片的灭火机器人的设计[J]. 2007(3):24-27
[3]肖海荣,等. 比赛用灭火机器人设计与实现[J].微计算机信息.2007,(2):283-285
[4]李小燕,等. 智能灭火机器人的设计与实现[J].电子设计工程.2010,(3):51-54
According to the race rules for fire-fighting robot, this paper designs a fire-fighting robot based on door-detection strategy, and achieves door-detection function by distributing scientifically various different sensors based on existing robot in our school. It mainly realizes four modules such as obstacleavoidance, fire-searching, fire-extinguishing and back-home. Experiments show that this fireextinguishing strategy has shorter fire-extinguishing time.
机器人;灭火比赛;门口检测
robot; fire-fighting race; door-detection
10.3969/j.issn.1001-8972.2011.12.079
