基于MSP430单片机的测速装置设计
2011-10-26李盘文张玉琴中航工业飞行试验研究院测试技术研究所
李盘文 张玉琴 中航工业飞行试验研究院测试技术研究所
基于MSP430单片机的测速装置设计
李盘文 张玉琴 中航工业飞行试验研究院测试技术研究所
针对以往线圈靶测速方案、光幕靶测速方案等存在测速精度低、可靠性差,且难于野外水池使用等问题,综合考虑高速航行体水下运动存在干扰因素多、环境压力变化大、测速靶难于完全密封等因素,基于定距测时法,采用接触性区截装置锡箔靶和嵌入式微处理器硬件系统的测速方案。对常用低成本锡箔靶,增加调理电路,通过阻抗匹配使其适应不同水质和非完全密封条件,解决了难于野外环境使用和密封问题。基于MSP430F149单片机,进行了电源电路、复位电路、时钟电路、信号调理电路、人机接口电路、通信接口电路等设计,开发了嵌入式系统软件和上位机软件,并采取了相应的硬、软件抗干扰措施,研制了具有信号采集、存储、处理、显示、通信等功能的测速系统。
高速航行体;水下测速系统;速度;MSP430F149;锡箔靶
随着俄罗斯超空泡鱼雷“疾风”的问世,以其巨大的军事应用前景成为各大军事强国的研究热点。由于实验条件的限制,对于水下高速航行体运动速度的测量方法也已开展过一些研究,但国内目前没有较成熟的测速技术。已往有采用密封防水线圈靶和光幕靶来测量水下弹丸运动速度。
密封防水线圈靶在水下射弹测速时,线圈缠绕的均匀一致性,弹丸过靶姿态,线圈厚度及由之引起的线圈靶的实际半径和等效半径的不一致等,都将影响测量结果的确定度,安装使用和环境要求使其水下测试可靠性差、精度低。
水下光幕靶测速此方法最适合在室内或水下靶道内使用,并且该仪器主要是为了测试水下枪械所设计的,对于从陆上射入水里的超空泡射弹试验由于射弹会在水里产生空泡对光幕靶有很大的影响,从而产生很大的误差。
根据水下高速航行体试验测速需求,综合考虑高速航行体水下速度测量的各项影响因素,基于定距测时法,采用接触性区截装置锡箔靶和嵌入式微处理器硬件系统的测速方案。
1 测速系统工作原理
水下高速航行体测速装置是由两部分组成,一部分是测速靶被置于水下;另一部分是测速装置的硬件设备。当航行体穿过置于水下的测速靶时,将断路的测速靶导通,能够在瞬间形成一个脉冲信号,测速靶上的信号线接入测速装置的主机板信号接口,通过主机板上的信号捕捉电路能够将水下的三个测速靶信号触发时刻记录下来,前后时间之差就是航行体穿过每两个靶所用的实际时间,靶距是固定的,从而可以求得航行体穿越每两个测速靶之间距离的平均速度,并且通过求得的两个速度可以估计出高速航行体在水里的速度降;同时也将信号线接入主机板的A/D采集接口,采集整个射弹实验过程的电压信号,然后将所有数据存储下来,再利用上位机软件将信号变化的曲线显示出来,直观地获得时间间隔和弹丸速度。
2 测速装置硬件设计
水下测速系统主机板集测量、控制、显示、通讯等功能于一体,为此其硬件电路需要具备对电压信号的采样、捕获、存储功能和报警,提供友好的人机界面与上位机进行通信功能。
2.1 信号调理电路
信号调理就是把来自传感器的模拟信号变换为用于数据采集、控制过程、执行计算、显示读出和其他目的的数字信号。调理就是放大,缓冲或定标模拟信号,使其适合于模、数转换器(ADC)的输入,考虑到MSP430F149单片机的ADC12模块只能接受0~2.5V的电压信号,本文设计的调理电路就是把来自区截装置0~12V的电压信号转换为适合MSP430F149单片机的ADC12模块输入的0.55~2.55V电压信号,信号调好电路主要由两级运放构成。如图1所示:

图1 调理电路
2.2 信号捕捉电路设计
本设计对信号的捕捉是通过将三路测速靶信号引入信号捕捉电路,捕捉电路将输出一连续的方波信号,在利用MSP430F149单片机的定时器A的捕获功能,检测并记录三个信号的第一次发生上升沿的时刻,即可算出航行体穿越每两个测速靶所用的时间,测量靶距后,进而求出航行体的水下航行速度。信号捕捉电路如图2所示。
2.3 实时时钟和存储电路设计
在记录电压变化的整个过程中,需要将事件发生的时间实时记录,就要求测速装置系统提供实时时钟功能。本设计选用DS1302实时时钟芯片。图3给出了DS1320时钟芯片与单片机的接口电路。
存储芯片选用K9S5608V0M-SSB0,系统设计主要针对大数据量存储,需要将电压信号变化的整个过程记录下来。利用MSP340F149的一般I/O口来模拟总线,同时通过端口的方向寄存器来设置端口的输入输出方向。图4给出MSP430F149单片机与SmartMedia卡的接口电路。

图2 信号捕捉电路

图3 时钟芯片与单片机的接口电路

图4 单片机与SmartMedia卡的接口电路
3 测速系统的软件设计
3.1 主程序设计
根据测速系统预期要实现的功能,主程序将按自上而下顺序执行,当有中断发生时(如检测到脉冲信号或有键按下),系统将根据软件排定的中断优先级来响应中断,中断完成后再返回主程序继续执行。下面主要介绍主程序设计。
在主程序中,主要完成初始化、报警、数据发送等功能,其中初始化包括系统时钟初始化、ADC12模块初始化、Timer_A、Timer_B初始化、单片机I/O口的初始化和LCD初始化等。中断程序包括:定时器中断、键盘中断、通信中断等,主程序设计流程图如图5所示。
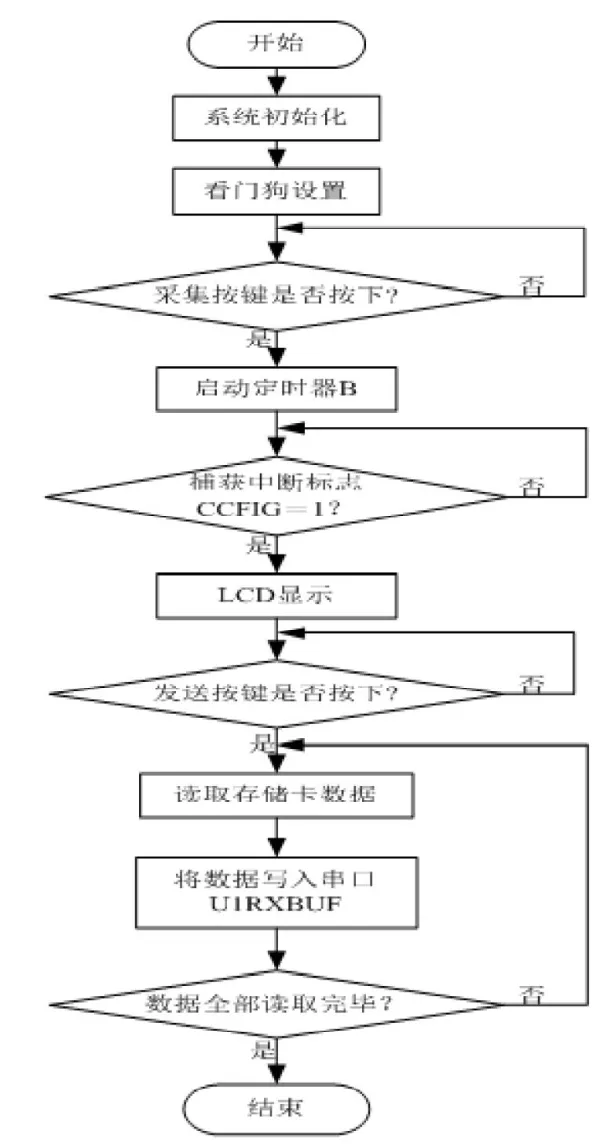
图5 主程序流程图
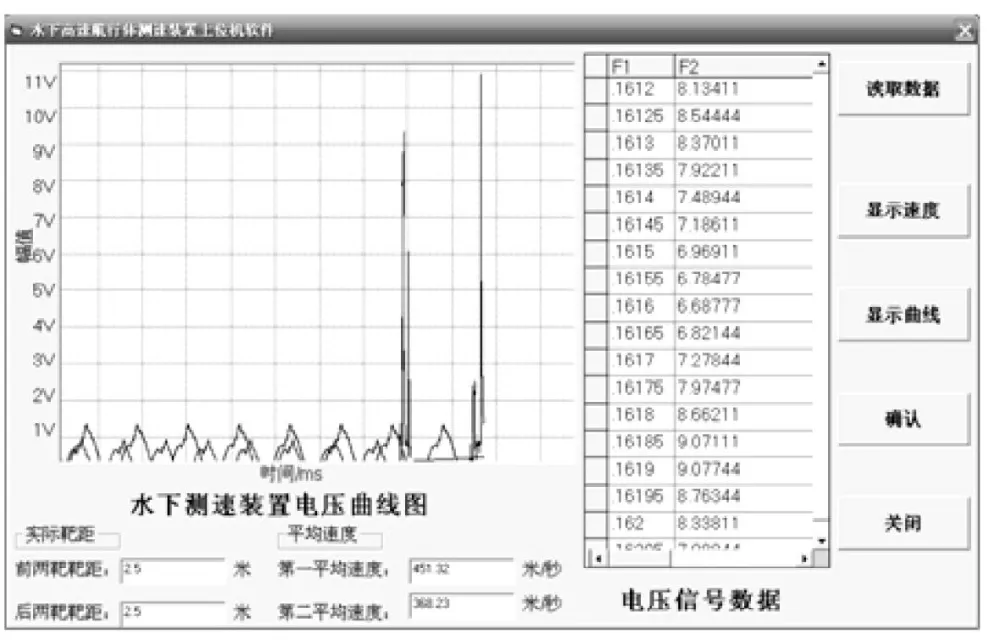
图6 上位机软件
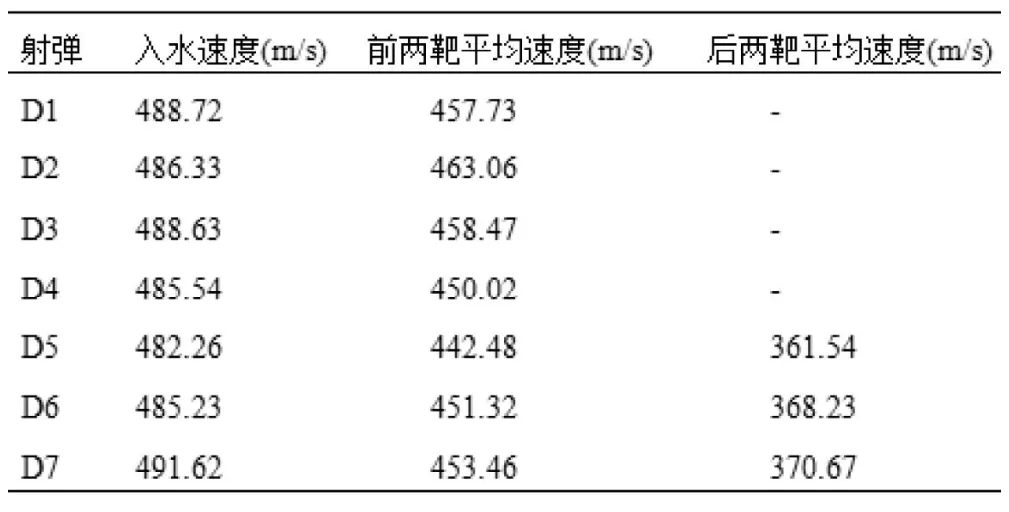
表1 各型号航行体在空气和水中运行速度
3.2 上位机软件设计
本设计采用MSComm控件编写上位机软件的通信程序。MSComm为应用程序提供了通过串行接口收发数据的简便方法。本设计MSComm控件采用事件驱动的通信工作方式。
上位机端口的数据传输格式必须和单片机串口通信的数据传输格式相同。Visual Basic环境下串口的属性和通信工作方式可通过MSComm控件的属性来设置,其中重要的属性包括CommPort属性、Settings属性和RThreshold属性等。CommPort属性可设置并返回通信的端口号,本设计中采用串口1来进行通信,设置数据传输格式通过Settings属性完成,此处数据通信格式的设置分别是波特率为9600bps,1位起始位,8位数据位,1位偶校验和1位停止位。上位机软件如图6所示。
4 试验结果
装置软硬件设计完成后,进行了实际实弹速度的测试实验,获得了速度参数和信号变化数据,获取的部分速度数据如表1所示。对实验数据的分析表明,测量结果误差<6.755‰,满足设计的精度要求。前四发航行体测速水下只放置两个测速靶,所以在下表中没有后两靶平均速度。
5 结语
本设计以16位5低功耗单片机MSP430F149作为核心控制器,利用该芯片丰富的片上资源,简化了整体电路结构,实时性好,经试验验证能满足设计要求,各模块工作正常,对电压信号进行了很好的调理和转换,达到了预期的精度,为水下高速航行体的研究提供了真实的靶试速度。
[1]刘世平. 弹丸速度测量与数据处理[M].北京:兵器工业出版社.1994
[2]胡大可. MSP430系列超低功耗16位单片机原理与应用[M]. 北京:北京航空航天大学出版社.2001
[3]沈兰荪. 高速数据采集系统的原理与应用[M]. 人民邮电出版社.1995
[4]李江全,张丽. Visual Basic串口通信与测控应用技术实战详解[M]. 人民邮电出版社.2007
10.3969/j.issn.1001-8972.2011.08.088