微陀螺模态特性的参数化分析方法
2011-10-20肖定邦吴学忠陈志华侯占强
李 浩,肖定邦,吴学忠,陈志华,侯占强
(国防科学技术大学机电工程及自动化学院,长沙 410073)
微陀螺是一种敏感角速度和角位移的惯性器件,大部分的微陀螺都属于振动式陀螺,一般工作在谐振状态,其驱动模态和敏感模态的固有频率差会直接影响微陀螺的灵敏度[1]。模态分析是微陀螺结构设计的重要工作,为了确定微陀螺的结构尺寸,通常需要进行大量的有限元仿真[2-5]。因此开发一个参数化的微陀螺模态分析模块可以减少大量繁琐和重复性的工作,对于提高效率和可靠性具有重要的意义。
APDL语言即ANSYS软件提供的参数化设计语言,使用APDL语言可以更有效地、自动地进行分析计算,同时它也是一种高效的参数化建模手段。使用APDL语言进行封装的系统可以只要求操作人员输入前处理参数,然后自动运行ANSYS进行求解[6-7]。本文设计了一种采用L形截面的悬臂梁支撑的微陀螺结构,通过VC对APDL命令流进行封装,开发了一个参数化的模态分析模块,并利用该模块研究了微陀螺的模态频率随主要结构尺寸变化的规律,为结构尺寸的确定提供依据。
1 微陀螺结构、工作原理与参数化模型的建立
微陀螺结构如图1所示,主要包括质量块、L形截面的支撑梁、锚点和玻璃基板以及上面的电极。微陀螺采用单支撑梁的形式,避免了采用多梁支撑时由于制造误差导致的不对称的问题,悬臂梁的结构使得热应力的影响变得很小[8-10]。
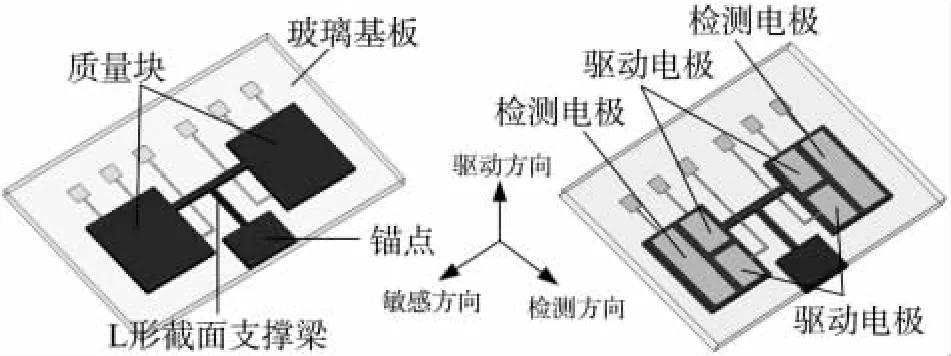
图1 微陀螺结构示意图
这种微陀螺结构巧妙地运用L形截面支撑梁的弯曲特性,利用平板电容的法向力使微陀螺的惯性质量产生切向运动,通过施加与陀螺平面正交的静电力,形成弯矩Me,Me在L形截面梁的惯量主轴I上有分量Md,从而使两质量块产生绕I轴方向的弯曲振动,当在敏感方向有角速度时,由于科氏力的作用会使质量块在检测方向产生绕薄梁的转动,通过检测质量块在检测方向的位移便能求出外界的角速度。该结构利用平板电容的法向力,可以使驱动方向获得较大的静电驱动力,同时又具有较高的品质因子,并且驱动电极和检测电极在同一平面内,简化了微陀螺的制造工艺。

图2 支撑梁截面
微陀螺的工作模态为第一、二阶模态,其驱动模态和检测模态的振型如图3所示。

图3
由于微陀螺的驱动模态是绕支撑梁截面的惯量主轴的弯曲振动,驱动模态的振动平面与玻璃基板成一个夹角π/2-θ,如图4所示。在硅结构与玻璃基板间隙一定的情况下,支撑梁惯量主轴的偏角θ越大,允许的驱动模态振幅就越大。采用L形截面的支撑梁,可以通过配置梁的缺口尺寸,获得任意角度的惯量主轴,因此与文献[10]中采用平行四边形截面梁支撑的微陀螺相比,该结构可以获得更大的驱动振幅,进而获得更大的灵敏度。

图4 驱动模态振动平面示意图
驱动模态和检测模态频率的计算公式都可以表示为

k和I分别是微陀螺的模态刚度和模态转动惯量,由于k和I的理论计算十分复杂,本文采用有限元的方法对其进行分析。
在ANSYS中建立微陀螺的有限元模型有两种方法,一种是通过导入CAD几何模型,然后划分单元生成有限元网格模型,这种方法不能得到参数化的模型。另一种是通过ANSYS直接进行实体建模再经网格划分得到,本文就是采用这种方法,通过拉伸、镜像、布尔运算等方法创建出微陀螺的几何模型再进行网格划分得到其有限元模型,然后在APDL文件中将 L1、L2、L3、L4、B1、H1 等重要尺寸参数设置为接口变量,接受VC传递的参数,得到的微陀螺的参数化模型如图5所示。

图5 微陀螺的参数化模型
2 参数化的模态分析模块
2.1 模块的功能和结构
参数化的模态分析模块功能应该包括:①微陀螺结构尺寸、材料特性等参数的输入,单元类型和网格划分精度的选择;②将用户输入的参数传递给ANSYS的APDL命令流中相应的变量;③以批处理的方式调用ANSYS,执行APDL的命令流,并保存模态频率分析结果到txt文件中;④显示模态分析结果。模块的结构如图6所示,首先通过VC编制的界面进行前处理参数输入,输入完毕后将参数值传递给APDL命令流中相应的变量,然后调用ANSYS执行APDL命令流,将分析结果保存到txt结果文件中,最后读取txt中的数据,查询并显示分析结果。

图6 模块结构图
2.2 模块界面的编制
在VC中利用模态对话框和常用控件工具箱编制出模块界面如图7所示,主要包括“输入参数”、“输出参数”和“程序控制”三部分。

图7 模块界面
2.3 APDL命令流的生成
直接使用APDL语言编写命令流比较困难,可以先在ANSYS中完成结构建模及模态分析等一系列工作,然后点击菜单“file”下的“Write DB file”生成.lgw文件,将生成的lgw文件中需要设置的参数替换成相应的变量,再在文件尾部添加提取和保存模态频率的命令,最后将文件扩展名改为txt格式,就得到了所需的APDL文件。这里模态频率的提取使用*get命令:
*get,Parn,mode,n,freq
其中Parn是存放第n阶模态频率的变量,频率分析结果利用*vwrite命令写入到相应的txt文件[11]。
2.4 VC与ANSYS接口问题
VC与ANSYS的接口主要解决如何在VC中调用ANSYS以及参数传递的问题,本模块利用ANSYS的批处理模式来执行APDL命令流,调用语句为:


其中-b表示批处理模式,gyro.txt为输入文件,即上一步得到的APDL命令流文件,gyro.out是输出文件,记录了一些结果和出错信息。通过读取界面中控件的输入,然后利用CStdioFile类及其成员函数将参数设置命令和用户输入的参数值一起写入APDL文件模块来实现参数传递。另外该模块还具有利用ANSYS的Display Program来查看定向输出的grph文件的功能,使用户只需单击界面上的按钮,即可查看模态分析的图形结果,Display Program的调用语句为:
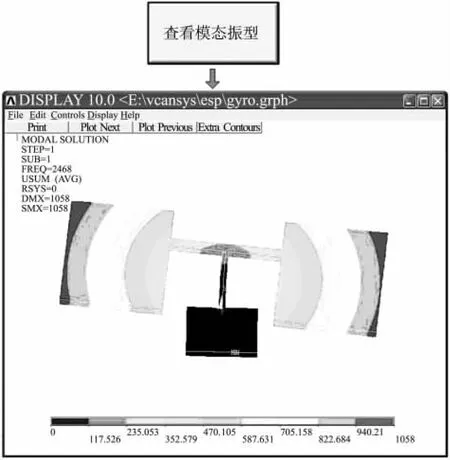
图8 查看模态分析图形结果
3 微陀螺模态分析及尺寸优化
利用编制的模块对微陀螺进行模态分析,研究微陀螺模态频率随各结构尺寸变化的规律。经过大量仿真后发现对模态频率影响较大的是硅结构的厚度H1和支撑梁的宽度B1,图9是在其他尺寸不变的情况下,只改变支撑梁宽度B1,模态频率随宽度变化的关系曲线。从曲线可以看出驱动频率和检测频率都与支撑梁宽度成线性关系,并随宽度增加而增加,而驱动模态与检测模态的差值与宽度成单调递增的关系。
图10是微陀螺在其他尺寸不变的情况下,只改变硅结构层厚度H1,模态频率随厚度变化的关系曲线,从图中可以看出随着厚度的增加,驱动模态频率变化比较缓慢,而检测模态频率变化较大,两者的差值与厚度成单调递减的关系。
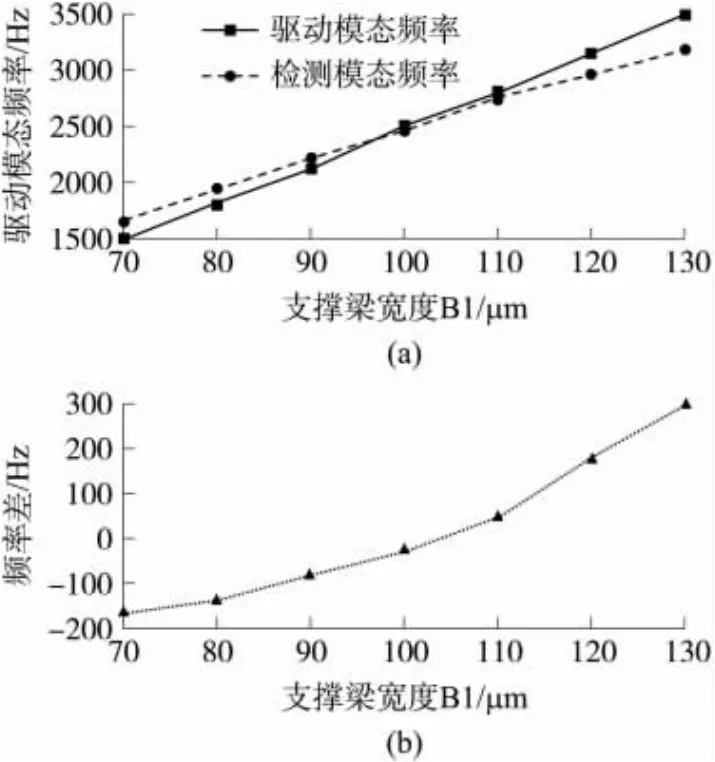
图9 支撑梁宽度变化对模态频率的影响

图10 硅结构厚度变化对模态频率的影响
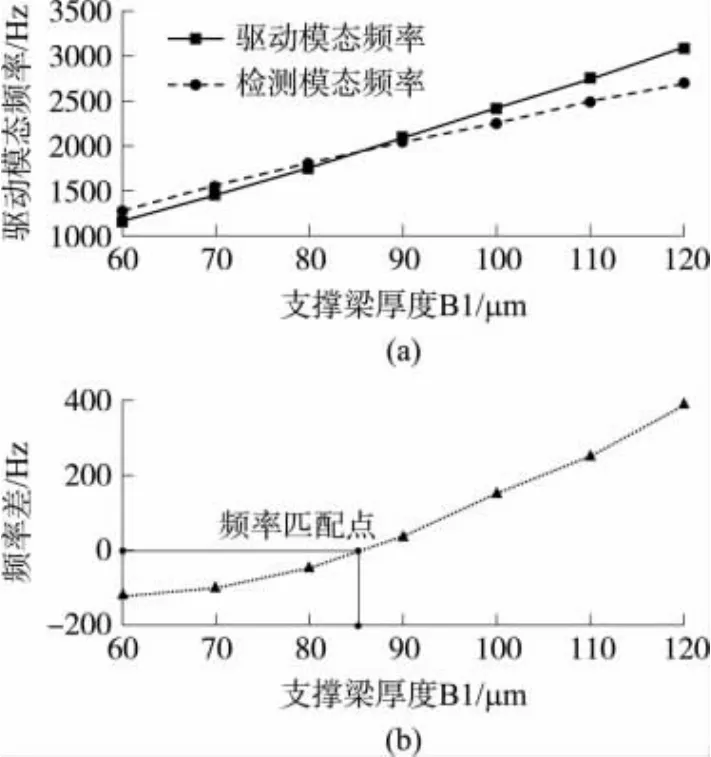
图11 厚度为130 μm时,支撑梁宽度变化对模态频率的影响
根据上面的分析可知,通过改变支撑梁宽度和硅结构厚度可以有效调节微陀螺工作频率以达到设计要求。受刻蚀深度的限制,硅结构厚度不能太大,这里取130 μm,通过改变支撑梁的宽度,得到的模态频率随宽度变化的关系曲线如图11所示。由于微陀螺模态频率相差越小,灵敏度越大[12],对图11中曲线进行插值获得其模态频率的匹配点,即当硅结构厚度为130 μm,支撑梁宽度为86 μm时,驱动模态与检测模态频率完全匹配,这时驱动和检测模态频率值为1 962 Hz,第三阶模态频率为6 754 Hz,远大于工作频率,有效地隔离了工作模态与非工作模态,因此可以作为微陀螺的结构参数。
4 结论
设计了一种采用L形截面的悬臂梁支撑的微陀螺结构,成功地利用VC对APDL的命令流进行封装,开发了参数化的微陀螺模态分析模块,使用户只需在程序界面输入模型的尺寸参数即可获得其模态频率,给设计人员减少了大量繁琐的重复性工作,
提高了的工作效率和可靠性,这种参数化的分析和设计思想也适用于微陀螺的静力仿真与谐响应仿真等。利用该模块研究了微陀螺模态频率随各结构尺寸变化的规律,发现对模态频率影响较大的是硅结构的厚度和支撑梁的宽度,当微陀螺厚度和支撑梁宽度的尺寸分别为130 μm和86 μm时,其驱动模态与检测模态频率完全匹配。
[1]李锦明,郭慧芳,刘俊.一种三框架电容式硅微机械陀螺结构设计与仿真[J].传感技术学报,2008,21(2):258-260.
[2]吕博,刘雪松,崔健,等.一种用有限元工具仿真水平轴微陀螺解耦性能的方法[J].传感技术学报,2008,21(2):255-257.
[3]朱一纶,王寿荣,裘安萍.微机械谐振陀螺的有限元分析[J].东南大学学报(自然科学版),2004,34(01):38-41.
[4]邓景跃,孙雨南,王莹.微型石英音叉陀螺模态特性的有限元分析[J].光学技术,2006,32(08):61-63.
[5]郭宏宾,赵玉龙,蒋庄德.微机械轮式陀螺仪的结构分析[J].微纳电子技术,2007,44(7):150-152.
[6]陈伟,何飞,温卫东.基于结构参数化的有限元分析方法[J].机械科学与技术,2003,22(6):948-950.
[7]李韬,米双山,刘东升,等.基于VC和ANSYS的破片侵彻参数化有限元分析[J].兵工自动化,2008,(27)9:73-74.
[8]Hedenstierna N,Habibi S,Nilsen S.Bulk Micromachined Angular Rate Sensor Based on the‘Butterfly’Gyro Structure[C]//Proceedings of the 14th IEEE International Conference on MEMS,Interlaken,2001:178-183.
[9]Duan Fei,Jiao Jiwei,Wang Yucai,et al.A novel Micromachinedx-Axis Tuning fork Gyroscope Based on“8-Beams/Proofmass”Structure[J].Chinese Journal of Semiconductors,2007,28(10):1630-1635.
[10]Xiao D,Man H,Hou Z,et al.High Performance Micromachined Gyroscope with a Slanted Suspension Cantilever[C]//Proceedings of the IEEE Sensors,Christchurch,New Zealand,October 2009:467-470.
[11]博弈创作室.APDL参数化有限元分析技术及其应用实例[M].北京:中国水利水电出版社,2004.
[12]高世桥,刘海鹏.微机电系统力学[M].北京:国防工业出版社,2008:165-238.
