半电极含金属芯压电纤维的动态微力传感器*
2011-10-20边义祥裘进浩
边义祥,裘进浩
(1.扬州大学 机械工程学院,江苏 扬州 225127;2.南京航空航天大学机械结构强度与振动国家重点实验室,南京 210016)
压电材料同时具有传感和驱动性能,可以用作传感器或驱动器。为了适应特殊的应用需要,很多学者正在研究特殊形状的压电器件,如压电陶瓷纤维、薄膜、薄壳等[1]。裘进浩等[2]和 Hiroshi Sato等[3]先后研制成功的含金属芯压电陶瓷纤维MPF(Metal-Core Piezoelectric Ceramic Fibers),就是一种新型的压电器件。当MPF只有一半的纵向表面喷镀金属层时,称为半电极含金属芯压电纤维HMPF(Half Coated Metal Core Piezoelectric Fiber)。
自从MPF和HMPF研制成功后,一些学者对MPF进行了理论和实验研究。Gael Sebald等建立了MPF的物理振动模型,分析了MPF的性能及金属芯的影响[1,4],研究了 MPF 的机电特性[5];Hiroshi Sato等测量了 MPF的机械性能[6],把 MPF粘贴在梁的表面,利用MPF的传感和驱动性能制作了智能复合材料悬臂梁[3];Kiyoshi Takagi等在碳纤维复合材料中埋入MPF,实现了振动控制和结构损伤监测[7,8];Davood Askari等分析了 MFC 和 MPF 的机械性能的异同点[9]。Hiroshi Sato等还从电极配置、机电转换效率、机械性能、所需电场等方面分析了MFC和MPF之间的区别[10]。国内主要有南京航空航天大学展开了MPF的研究工作,刘建、常伟杰等把MPF粘贴在复合材料板的表面,建立了MPF对圆形压电片激励Lamb波的传感响应模型,并应用这个模型对复合材料板的损伤进行定位[11-12]。
上述研究几乎都是关于表面全覆盖电极的MPF,而在很多情况下,例如气流传感、弯曲驱动等方面,HMPF更能发挥重要的作用。本文作者之一的裘进浩在世界上首次成功制作了 HMPF[13]。在以前的工作中,我们研究了HMPF的静态本构关系方程[14]和驱动性能[15]。为了扩展 HMPF的应用范围,有必要研究其传感性能。本文根据第一类压电方程,基于振动理论,使用平均电荷方法,研究了悬臂梁结构的HMPF自由端外加垂直简谐作用力时,电极上产生的电荷值,由此建立了动态微力传感模型;分析了HMPF长度和半径比对产生电荷值的影响,并实验验证了所建立的传感模型。
1 理论建模
1.1 压电方程
HMPF的几何形状和横截面分别如图1和图2所示。由于是圆柱形,为了研究方便,采用圆柱坐标系,压电方程的直角坐标系和圆柱坐标系的对应关系为,直角坐标系的1方向、2方向和3方向分别对应圆柱坐标系的z方向、θ方向和r方向。
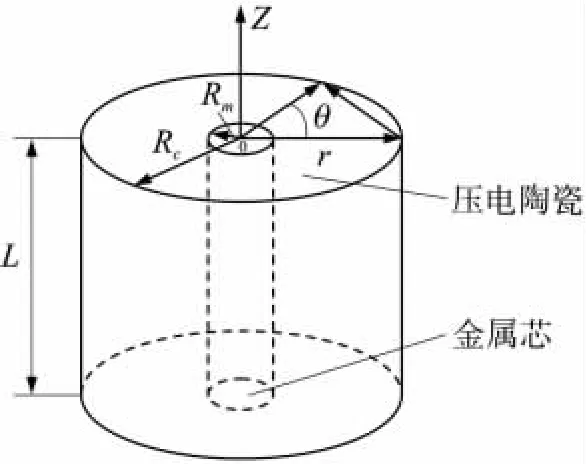
图1 HMPF的几何形状及坐标表示

图2 HMPF的横截面及其极化示意图
如图2所示,HMPF的上半部分压电陶瓷表面覆盖了金属层。外加电压时,压电陶瓷内部的电场分布比较复杂,为了研究方便,认为表面覆盖电极的上半部分压电陶瓷极化后,具有压电效应,其极化方向也认为是径向分布;认为表面没有覆盖电极的下半部分压电陶瓷没有被极化,不具有压电效应。由于陶瓷表面的金属层很薄,在下面的研究中,其影响不予考虑。
当HMPF用作悬臂梁结构时,假设其压电陶瓷部分在径向可以自由伸缩;和长度相比,HMPF的半径很小,其圆周方向和切向的应力可以忽略。外加电场后,其应力和电场的边界条件可以表示为:

所加电场方向和极化方向相反时,压电陶瓷产生伸长变形。根据第一类压电方程,当d31取负值时,其应变和电位移分别为
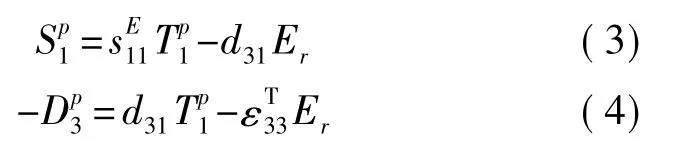
其中的Sij是应变,Tij是应力,Di是电位移,Er是电场强度是弹性柔顺系数,dij是压电常数,是介电常数,上标p表示压电陶瓷极化部分。由于是圆柱形状,在HMPF的电极上外加电压后,半径r处的电场强度为

而下半部分压电陶瓷以及金属芯的应力应变关系为

上标m和n分别表示金属芯和下半部分没有被极化的压电陶瓷。
1.2 HMPF的微力传感模型
悬臂梁结构HMPF的自由端受到动态弯矩M时,由于HMPF的长度和半径比很大,可以认为HMPF各纵向纤维的曲率半径相同,都为ρ,则

其中Mm是金属芯部分所受弯矩,Mc是整个压电陶瓷部分所受弯矩,Em是金属芯的弹性模量,Ec是整个压电陶瓷部分的弹性模量,Im是金属芯的惯矩,Ic是整个压电陶瓷部分的惯矩。联立式(8)和式(9),并由Em=1/sm和Ec=1/sE11可解得

由1/ρ=M/(EI),得到整个HMPF的等效的抗弯刚度EI

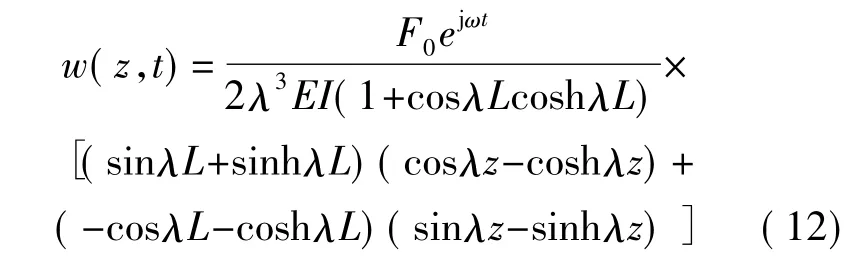
当动态激励力F=F0ejωt垂直作用在悬臂梁结构HMPF自由端时,HMPF的中性层在极化部分和未极化部分的结合面上,如图3所示。此时,HMPF是均匀等截面直梁,可以得到HMPF的弯曲振动模型[16]

ρc和ρm分别表示压电陶瓷和金属芯的密度。由此,得到HMPF的曲率

则HMPF的应变可以表示为

把式(15)代入式(3)和式(4)中,并由Er=0,得到压电陶瓷极化部分电位移为:

由式(16)得压电陶瓷极化部分外表面和内表面的电位移,即电荷密度分别为:

用平均电荷方法[17],得到HMPF表面电荷为
1.3 长度和半径比的影响
由式(19)可知,当悬臂梁结构HMPF自由端受到正弦激励作用时,HMPF产生的电荷也是正弦信号,频率和激励频率相同。如果不考虑时间因素的影响,式(19)可以写成:

进而得到:

当HMPF的参数确定后,测量到HMPF产生的电荷频率和幅值,根据式(19)和式(21)可以算出激励力的频率和幅值。
为了研究HMPF半径比对产生电荷幅值的影响,把半径比B=Rm/Rc代入式(20),得
为了研究HMPF结构尺寸对HMPF产生电荷的影响,把HMPF的参数代入到式(22)中进行计算。含铂金芯HMPF的参数见表1。设所加激励力的参数:f=10 Hz、F0=0.000 1 N。逐渐增大 HMPF的长度和半径比,HMPF产生的电荷幅值如图3所示。由图可见,在悬臂梁结构HMPF自由端激励力频率和幅值不变的情况下,HMPF产生的电荷幅值随着长度的增加而增大,在半径比为0.44处取最大值。如果要提高HMPF动态微力传感器的灵敏度,可以采用增加长度和选择合适半径比的方法。

图3 含铂金芯HMPF动态微力传感器电荷幅值和结构尺寸的关系
由以上的分析可知,悬臂梁结构HMPF动态微力传感器参数确定后,根据其电荷的频率,可以测量激励力的频率;根据电荷的频率和幅值,可以测量激励力的幅值。
2 实验研究
为了验证HMPF的动态微力传感性能,搭建如图4所示的实验系统。把一根HMPF一端固定在激振器的激振头上,另一端搭在电子天平上。当激振器低频振动时,HMPF受到电子天平动态微力作用。
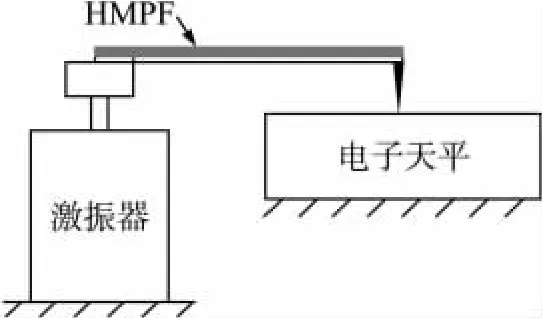
图4 HMPF动态微力传感器实验系统
电子天平的读数和HMPF产生的电荷信号经过电荷放大器、dSPACE卡输入到计算机中。HMPF长度为36 mm,其它参数如表1所示。

表1 MPF的材料性能
HMPF产生电荷的时域信号,经过FFT变换为频域信号后,可以得到HMPF产生电荷的频率。取时域信号中电荷幅值的平均值,由式(21)可以得到激励力的幅值。一组动态微力幅值的测量结果如图5所示。
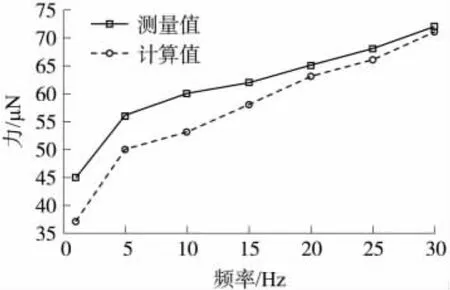
图5 动态微力幅值的测量结果
实验结果表面,由HMPF测定的动态微力的幅值和理论值之间有一定程度的误差,主要原因是:悬臂梁结构的HMPF自由端受力弯曲后,压电陶瓷极化部分受到拉伸时,在电极表面产生电荷;当HMPF被拉伸到最大位置时,电荷量最大。当压电陶瓷极化部分受到回复拉力时,在电极表面将产生和拉伸时相反的异种电荷,并和原来的电荷相互抵消,且由于HMPF的电容很小,原来的电荷将很快消失,导致HMPF的电荷很快减小到零;而此时,HMPF并未回复到平衡位置,其应变还是正应变,电荷和应变相比有滞后。在接下来的回复和压缩过程中,HMPF的电荷和应变之间同样有滞后。由于HMPF产生的电荷和所受到的力之间存在滞后,导致动态微力幅值的测量值和理论值之间有误差。
随着激励频率的增加,HMPF压电陶瓷极化部分受到拉伸和压缩的转换过程加快,电荷泄漏减少,产生的电荷和所受到的力之间的滞后减小,动态微力幅值的测量值和理论值之间的误差也逐渐减小。
从测量结果看,HMPF测量的动态微力的频率值和理论值误差不大,主要原因是:HMPF在测量过程中电荷的滞后主要是幅值的滞后,频率滞后很小,所以频率的测量值和理论值较为接近。
3 结论
悬臂梁结构HMPF自由端受到动态微力作用后,电极上将产生交变电荷。本文基于第一类压电方程和悬臂梁弯曲振动理论,使用平均电荷方法,推导了悬臂梁结构HMPF自由端受到动态微力作用时,电极上产生电荷的解析表达式。分析了长度和半径比对产生电荷的影响,结果表明含铂金芯的
HMPF传感器具有最佳半径比。搭建了HMPF动态微力传感器实验系统,进行动态微力传感实验;实验结果表明,悬臂梁结构HMPF对于动态微力具有很好的传感特性,可以较准确地测量动态微力的频率和幅值。该理论模型将进一步促进HMPF传感器的研究和应用。
[1]Gael Sebald,Jinhao Qiu,Daniel Guyomar,et al.Modeling and Characterization of Piezoelectric Fibers with Metal Core[J].Japanese Journal of Applied Physics,2005,44(8):6156-6163.
[2]QiuJinhao,Yamada N,JunjiTani,etal.Fabrication of Piezoelectric Fibers with Metal Core[C]//Proc.Of SPIE’s 10thInternational Symposium on Smart Structures and Materials,Active Materials:Behavior and Mechanics,D.C.Lagoudas,Ed.,San Diedo,CA.,Vol.555053:475-483,2003.
[3]Hiroshi Sato,Tadashi Sekiya,Masaru Nagamine.Design of the metal-core piezoelectric fiber[C]//Proceedings of SPIE,Smart Structures and Materials 2004:Smart Structures and Integrated Systems,Vol.5390:97-103(SPIE,Bellingham,WA,2004).
[4]Gael Sebald,Jinhao Qiu,Daniel Guyomar.Modelling the Lateral Resonance Mode of Piezoelectric Fibers with Metal Core[J].Journal of Physics D:Applied Physics J.Phys.D:Appl.Phys.38(2005)3733-3740.
[5]Gael Sebald,Abdelmjid Benayad,Qiu Jinhao,et al.Electomechanical Characterization of 0.55Pb(NiNb)O-0.45Pb(Zr0.3Ti0.7)O3 Fibers with Pt Core[J].Journal of Applied Physics,2006,100:054106-1-6.
[6]Hiroshi Sato,Masaru Nagamine.Mechanical properties of metalcore piezoelectric fiber[C]//Proc.of SPIE,Smart Structures and Materials 2005:Smart Structures and Integrated Systems,Vol.5764:623-629(SPIE,Bellingham,WA,2005).
[7]Kiyoshi Takagi,Hiroshi Sato,Muneharu Saigo.Robust Vibration Control of the Metal-Core Assisted Piezoelectric Fiber Embedded in CFRP Composite[C]//Proc.of SPIE,Smart Structures and Materials 2004:Smart Structures and Integrated Systems,Vol.5383:376-385(SPIE,Bellingham,WA,2004).
[8]Kiyoshi Takagi,Hiroshi Sato,Muneharu Saigo.Damage Detection and Aain-Scheduled Control of CFRP Smart Board Mounting the Metal Core Assisted Piezoelectric Fiber[C]//Proc.of SPIE,Smart Structures and Materials 2005:Modeling,Signal Processing,and Control,Vol.5757:471-480(SPIE,Bellingham,WA,2005).
[9]Davood Askari,Hiroshi Asanuma,Mehrdad N,et al.A Comparative Study on Macro-Fiber Composites and Active Fiber Composites with Metal-Core Piezoelectric Actruators/Sensors[C]//Proc.Of SPIE,Smart Structures and Materials 2006,Vol.6170:6170|-1-6170|-12.
[10]Sato H,Sekiya T,Shimojo Y.Fabrication and Vibration Suppression Behavior of Metal Core-Piezoelectric Fibers in CFRP Composite[C]//Proc.of TRansducing Materials and Devices,Brugge,Belgium,Vol.4946:80-87,2003.
[11]常伟杰,刘建,季宏丽,等.含金属芯压电纤维对Lamb波传感实验研究[J].压电与声光,2010,32(5):797-810.
[12]刘建,裘进浩,常伟杰,等.基于含金属芯压电纤维与Lamb波的一维结构损伤定位研究[J].振动与冲击,2011,30(4):16-20.
[13]Qiu Jinhao,Majung Park,Daisuke Hoshi,et al.The Research of the Development of the Air Flow Sensor Using the Piezoelectric Fiber with Pt Core[J].Japan AEM,2004,12(4):299-303.
[14]Bian Yixiang,Qiu Jinhao,Wang Xinwei.The Constitutive Equations of Half Coated Metal Core Piezoelectric Fiber[J].International Journal of Applied Electromagnetics and Mechanics,2009,29(1):47-64.
[15]边义祥,裘进浩,王鑫伟,等.半电极含金属芯压电纤维的驱动性能[J].光学精密工程,2009(1):107-117.
[16]Jan G Smits.Dynamic Admittance Matrix of Piezoelectric Cantilever Bimorphs[J].Journal of Microelectromechanical Systems,1994,3(3):105-112.
[17]Dongchang Sun,Liyong Tong,Satya N Atluri.Effects of Piezoelectric Sensor/actuator Debonding on Vibration Control of Smart Beams[J].International Journal of Solids and Structures,2001,38:9033-9051.
