CCD立靶操作误差的改善方法研究
2011-10-09王泽民雷志勇
王泽民,李 静,雷志勇
(西安工业大学 电子信息工程学院,陕西 西安 710032)
作为一种非接触式光电测量技术,CCD立靶由于其结构简单、使用方便、测量精度高、实时性强和自动化程度高[1-2]等诸多优点,而在现代靶场中动态飞行目标(如弹头等)的射击精度和立靶密集度测量领域得到较为广泛的研究和应用[1-2]。CCD立靶最主要的技术指标之一是坐标测量精度,引起坐标测量误差的因素有很多,以往对CCD立靶测量误差的分析都集中在对坐标求解模型的分析,通过对模型求偏微分,研究各参数的测量误差与系统对目标坐标测量误差之间的关系[3-6],往往忽略了CCD立靶的结构模型偏差所引入的测量误差。CCD立靶的结构模型偏差主要是指在工程实际应用过程中,由于现场布靶操作失误等原因造成两CCD相机的探测视场不重叠,这种现象使得坐标求解模型与结构模型之间的对应关系出现了失真,从而引入系统测量误差[7]。
1 CCD立靶操作误差分析
1.1 CCD立靶坐标测量原理
CCD立靶由两台结构和性能完全相同的线阵CCD摄像机组成,且使其光轴交汇,两个线阵CCD相机的探测视场共面且垂直于弹道方向,构成测试靶面。测试时,没有弹丸穿过靶面时,CCD对背景进行成像;当有弹丸穿过测试靶面时,其对背景光形成遮挡,而在两台CCD像面上形成阴影图像,通过对弹丸图像的处理提取出弹丸中心像素坐标,结合测试系统在靶道的布置参数,即可解算出弹丸的过靶坐标。弹丸过靶坐标测量原理如图1所示。f为镜头焦距,A1、A2分别为弹丸在 CCD1和 CCD2像面上成像的像素坐标,α1、α2分别为CCD1和CCD2光轴与水平面之间的夹角,L为两台CCD之间的距离,如图1所示。
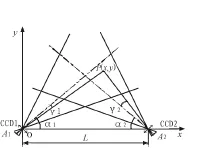
图1 线阵CCD交汇测量原理Fig.1 The measurement principle of linear CCD intersection
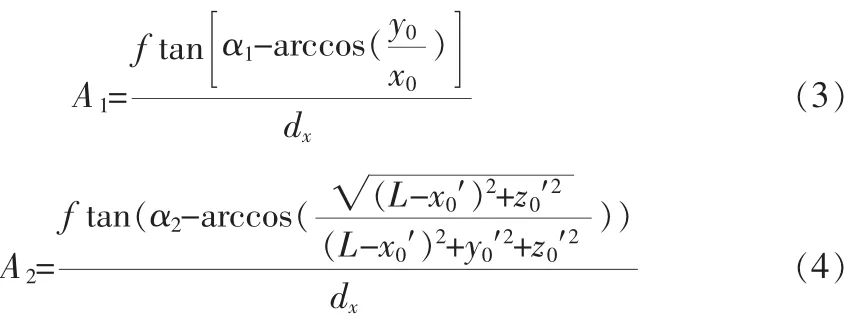
当弹丸从靶面内任意点P(x,y)点穿过靶面时,弹丸坐标计算如下。
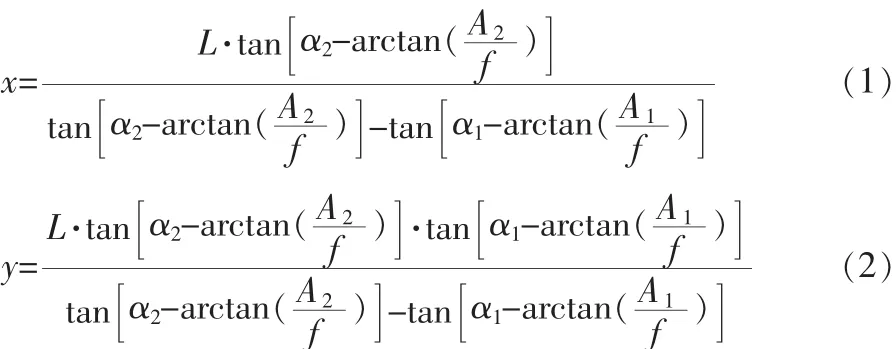
如果已知弹丸的过靶坐标,则可根据公式(1)和公式(2)反求A1和A2
1.2 CCD光幕对准误差分析
在CCD立靶的实际应用中,现场布靶时如果光幕对准出现偏差,就会出现图2和图3所示两种情况。

图2 两CCD存在距离Fig.2 There is distance between the two CCD
为分析方便,以像面I XO1Y为基准平面,目标飞行轨迹直线与平面 XO1Y 的交点为 P(x0,y0,0),与像面 II的交点为P′(x0′,y0′,z0′)。 使得目标在像面 II上的像素位置偏离 A20至A2,根据公式(1)和公式(2)计算弹丸的坐标(x′,y′),(x′,y′)与(x,y)的差值即为靶面不重叠所产生的测量误差。假设目标飞行轨迹直线方程为:

从图中可以看出,出现靶面不重叠情况直接影响到目标在像面II上的中心像素位置,推导后得出图2中弹丸成像像素位置为:
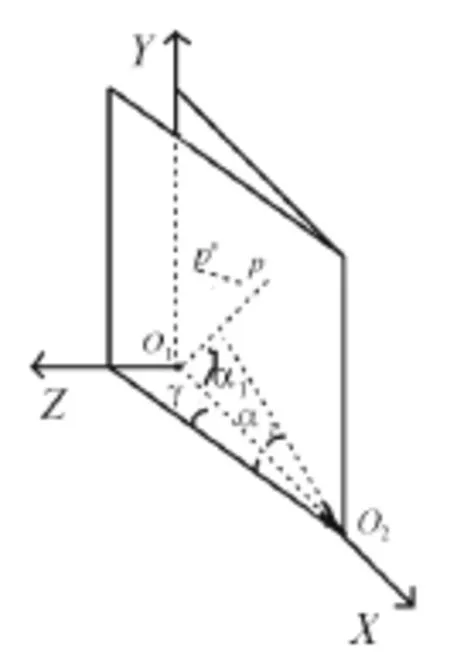
图3 两CCD存在水平夹角Fig.3 There is horizontal angle between the two CCD
图3中弹丸成像像素位置见式(7)。
1.3 水平调节误差分析
现场布靶时如果水平调节出现偏差,就会出现图4所示情况。
图4 垂直夹角造成的不重叠Fig.4 There is vertical angle between the two CCD
推倒后得到弹丸在像面II上中心像素位置见式(8)。

2 改善方法
在实际应用中,通常采用钢卷尺靠平的方法消除d、γ、φ,该方法的优点是设备结构简单、操作方便,缺点是存在一定误差。靶面平行距离d的产生主要是由于在布靶操作时,采用钢卷尺进行靠平时,由于钢卷尺未拉直而存在弯曲以及未将钢卷尺与测试设备上的基准线严格靠平而产生,一般情况下,d=5~10 mm,γ=0.5~2°。 垂直夹角不重叠主要是由于水平调节误差造成的,一般采用精度为30”的玻璃水泡,实际应用中,φ=0.3~0.5°。这些操作误差会对系统测量精度造成较大影响,尤其在大靶面测量中,必须予以严格控制,才能可靠的提高系统测量精度。针对实际情况,本文提出采用激光测距仪双向对准靠平测距的方法进行改善,原理如图5所示。
图5 激光测距仪双向对准靠平原理Fig.5 Principle of two-way alignment using laser rangefinder
如图5所示,在两台CCD测试仪左侧固定一台激光测距仪,右侧固定一块刻度板,布靶时,调整CCD测试仪使激光测距仪分别对准对面刻度板上的特定位置,该位置由前期实验室标定获得,最大限度的减小两台CCD探测面之间的距离。并分别测量靶距L1和L2,如果L1与L2不相同,则说明两台CCD探测面之间存在水平夹角,调整CCD测试仪直至L1与L2相同,实现对两台CCD探测面之间水平夹角的控制。
3 试验与数据分析
采用激光测距仪双向对准靠平测距法后两台CCD探测面之间的距离可以控制在2 mm以内,水平夹角不超过,利用改进后的CCD立靶与未改进的CCD立靶测试气枪弹丸坐标数据如表1所示。
表1 测试数据(单位:mm)Tab.1 Test data(unit:mm)

4 结 论
针对CCD立靶在实际操作中造成的结构误差建立了误差模型,对其产生原因和类型进行了分析,为了改善这种情况,提出了激光测距仪双向对准靠平测距法,试验数据表明,该方法切实有效,很大程度上提高了系统的测量精度。下一步将重点研究垂直夹角误差的控制方法。
[1]雷志勇,姜寿山.线阵CCD技术及其在靶场测试中的应用[J].西安工业学院学报, 2002,22(3):220-224.
LEI Zhi-yong,JIANG Shou-shan.Liner scan CCD technology and its application in target measurement[J].Journal of Xi’an Institute of Technology, 2002, 22(3):220-224.
[2]雷志勇,姜寿山.线阵CCD测量弹丸飞行姿态方法的研究[J].西安工业学院学报,1998,2(18):87-91.
LEI Zhi-yong,JIANG Shou-shan.On the measure of the flying shell with line scan CCD[J].Journal of Xi’an Institute of Technology, 1998,2(18):87-91.
[3]韩丙辰.CCD光幕靶交汇测量精度研究[J].科技情报开发与经济,2005(8):173-175.
HAN Bing-chen.Research on the precision of the confluent measurement of CCD veiling target[J].SCI/TECH Information Development&Economy,2005(8):173-175.
[4]王泽民,高俊钗,雷志勇,等.CCD交汇测量系统布站方式的精度分析[J].山西电子技术,2006(5):38-40.
WANG Ze-min, GAO Jun-chai, LEI Zhi-yong,et al.The target calculate principle of linear CCD intersection measurement[J].Shanxi Electronic Technology, 2006(5):38-40.
[5]薛淑磊,王泽民.双线阵CCD交汇测量中的自动标定方法[J].西安工业大学学报,2008,5(28):422-425.
XUE Shu-lei,WANG Ze-min.Automatic calibration in dual linear-CCD camera intersection measuring system[J].Journal of Xi’an Technological University, 2008,5(28):422-425.
[6]王泽民,高洪尧.一种用面阵CCD测试弹丸炸点空间三维坐标的方法[J].计算机测量与控制, 2004,12(8):762-765.
WANG Ze-min,GAO Hong-yao.Method to measure the coordinate of projectile exploding position by square array CCD[J].ComputerAutomatedMeasurement& Control,2004, 12(8):762-765.
[7]颜树华,叶湘滨,王跃科,等.线阵CCD交汇测量靶中非共面误差的研究[J].光电子·激光,2000,1(11):65-68.
YAN Shu-hua, YE Xiang-bin, WANG Yue-ke.Research on noncoplanar error in the intersection measuring target with line array CCDs[J].Journal of Optoelectronics·laser,2000,1(11):65-68.
