不同攻角下投弃式海流剖面仪流体动力特性研究
2011-09-24陈文义陶金亮张曼曼
张 瑞,陈文义,刘 宁,陶金亮,张曼曼
(1.河北工业大学 过程装备与控制工程系,天津 300130;2.国家海洋技术中心,天津 300112)
不同攻角下投弃式海流剖面仪流体动力特性研究
张 瑞1,陈文义1,刘 宁2,陶金亮1,张曼曼1
(1.河北工业大学 过程装备与控制工程系,天津 300130;2.国家海洋技术中心,天津 300112)
对投弃式海流剖面仪(eXpendable Current Profiler,XCP)不同攻角下流体动力特性进行数值模拟,分析了XCP探头流场压力分布与运动趋势的关系。研究了不同攻角下XCP探头阻力系数和升力系数的变化规律。研究表明,攻角能够明显改变流场的轴对称性。0°~10°攻角下,XCP探头阻力系数和升力系数随攻角增大而增加,且基本成线性变化;10°~26°攻角下,XCP探头升力系数随攻角增大而增加,由于探头表面运动对流动分离的抑制作用,阻力系数在整体增加过程中出现局部降低;28°攻角附近出现流动分离,阻力系数上升很快升力系数趋近于零。探头自身旋转对探头的倾斜姿态有一定修正作用,当攻角大于28°后,自身修正功能基本消失。研究结果为开展XCP探头稳定性试验研究提供理论参考。
XCP探头;阻力系数;升力系数;攻角;数值模拟
投弃式海流剖面仪(XCP)是一种可快速获取海洋环境剖面参数的新型一次性设备,可以直接服务于海洋调查、海洋环境预报、海洋环境监测和海洋军事。XCP探头基本工作原理[1]为:探头在水中自由释放后下沉,由探头上安装的传感器获得某一深度上海流和温度信息;海洋环境信息经处理器处理,通过信号传输线传送,并由水面接收机接收。
海流信号通过XCP探头内部两个平行放置的电极采集,如果探头垂直姿态发生偏移会造成两个电极采集的海流信号不同步,导致传感器采集信号失真。因此研究XCP探头在不同攻角下的流体动力特性是探头设计者必须考虑的问题。目前,XCP探头流体动力特性基本是通过经验或海上实际投放得到。XCP探头海上试验所需经费高,周期长,并且受季节、环境等复杂因素限制,存在许多不确定性。通过数值模拟方法获得XCP探头的流体动力特性不但可以节约研究成本而且可以克服海上试验所面临的诸多困难。国内外运用数值模拟方法研究XCP探头运动问题还处于空白。本文对XCP探头0°攻角和不同攻角下流动特性进行数值模拟,根据模拟结果,分析了0°攻角下探头压力分布及运动情况;获得了不同攻角下阻力系数、升力系数的变化规律。研究结果对深入研究XCP探头的稳定性问题具有重要的实际意义和参考价值。
1 数学模型与计算域
1.1 控制方程
对于旋转XCP探头流场的计算,使用相对参考系更为方便。在相对参考系中,探头及计算网格是不转的,这样带来的好处是不需要作动网格计算。
旋转坐标系三维Navier-Stokes方程[2]表达式:
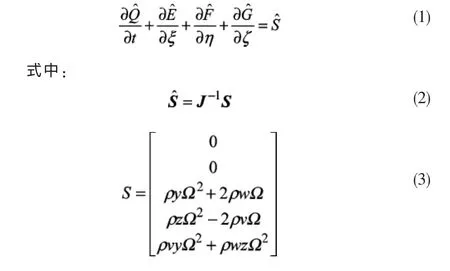
J为Jacobian行列式;Ω为坐标系绕旋转轴角速度。
方程(1)的左端和惯性坐标系中Navier-Stokes方程在形式上相同,但速度为相对速度,且方程右端增加了一个与旋转有关的原项S^。方程各项含义详见文献[2]。
1.2 计算模型与计算域
由于探头表面存在很多小沟槽和接口,这给建模和网格划分带来困难,这些细微的表面结构对探头流场及流动动力特性影响很小,因此本文在建立计算模型时,对探头试验模型作了局部简化处理,如图1所示,探头总长460 mm,最大截面直径51 mm。计算模型采用隐式有限体积法求解,湍流模型选用坐标系旋转的可实现性κ-ε模型[3],压力和速度的耦合求解采用SIMPLE[4]算法,空间离散采用二阶迎风格式[5]。
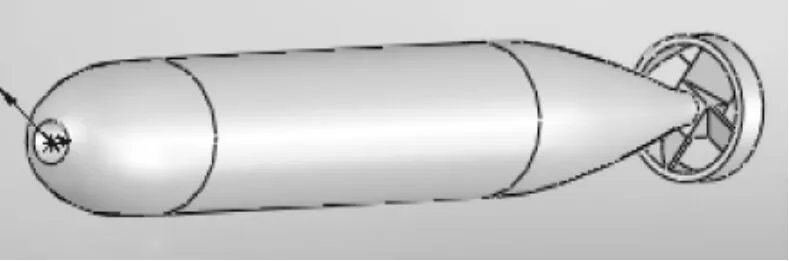
图1 XCP探头计算模型
2 数值模拟结果分析
2.1 XCP探头0°攻角下流动特性
探头的流体动力特性取决于其表面流体的压力分布,该压力分布反应了流体流过探头的流动状况。
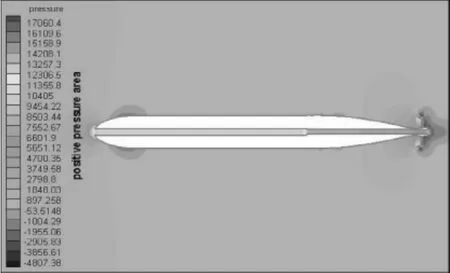
图2 XCP表面压力分布云图(α=0°)
XCP探头表面流体压力分布如图2。由图2可以看出,攻角α=0°情况下,探头上下流动情况对称,因此升力和俯仰力矩为零,有利于保持探头水下运动的稳定性。当流体流经探头时,在探头头部附近受到阻滞,速度迅速降低,因此,在探头头部附近会形成一个局部静压高于来流静压的正压驻点区[6]。来流沿着探头头部平面对称的排开加速,压力迅速降低,在平直段转折点处压力达到最小值、速度最大。此后压力开始恢复增加,在探头平直段压力基本保持常值。在探头尾部,平直段与收缩段过渡区域,有一个较大的低压区,说明来流流过尾翼收缩段时存在加速。随着尾部继续收缩,来流减速,压力开始逐渐恢复升高。当来流通过尾翼后,又一个低压区出现,这表明探头尾翼对前方流体有一个抽吸作用,使之有一个加速过程。图3为探头表面压力系数随轴向坐标位置变化曲线。图3很好的反映了流体以来流静压冲击探头,经过头部和尾翼的低压加速后,压力又基本恢复到来流静压,其中坐标-450 mm处为探头头部位置,0 mm处为探头尾翼前缘位置。
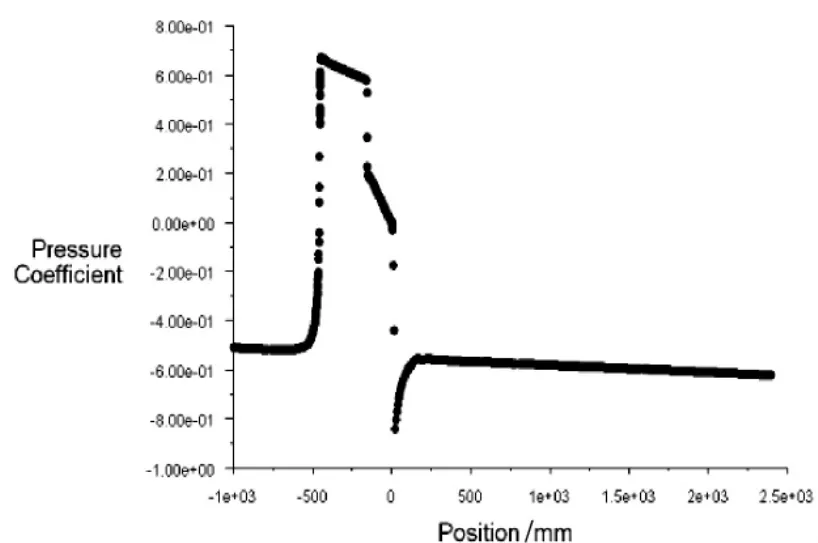
图3 XCP表面压力系数分布(α=0°)
2.2 XCP探头在小攻角下流体动力特性
为了获得XCP探头在小攻角下的流体动力特性,进一步研究攻角 α=±2°,α=±4°,α=±6°和 α=±8°下的流体动力特性。图4、图5模拟出了XCP探头阻力、升力特性。由图可知,随着攻角的增大,阻力系数和升力系数也随之增加。在α=±2°,α=±4°,α=±6°,α=±8°时,阻力曲线呈 U 型,在相同的正负攻角下,阻力绝对值有微小的差别,这可能是由于尾翼的非对称造成的[7]。升力基本关于α=0°对称,且基本成线性变化,这说明,在小攻角下,探头周围的流动仍然关于对称面对称。

图4 XCP探头阻力特性
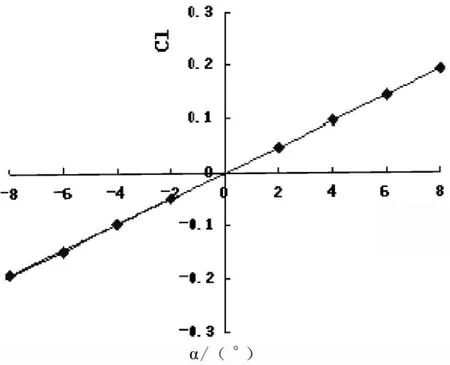
图5 XCP探头升力特性
攻角为α=4°,α=6°时的压力云图如图6所示。由图可以看出,压力分布不再对称,图中α=6°比α=4°压力分布不对称性明显。这给出了升力产生的物理原因[8]。因此攻角的存在不利于探头在水中保持稳定的垂直姿态下落。
2.3 XCP探头在较大攻角下流体动力特性
XCP探头在较大攻角下升力、阻力特性如图7所示。由图中升力曲线可见,10°攻角以后升力系数随攻角增大而增加。最大升力系数出现在28°攻角附近,此后,随着攻角的增加升力系数迅速减小并趋于零,这可能是由于XCP探头在攻角为28°附近流体流动发生分离所致。阻力系数在小攻角下随着攻角的增大而增加,在16°,22°和28°攻角附近阻力系数出现下降趋势,这可能是探头表面流体运动使得流动分离趋势受到抑制,造成了阻力系数减小,升力系数提高。探头处于28°攻角后,阻力系数增量显著提高,这可能是由于探头表面流体发生流动分离,导致阻力系数上升很快,进一步证明探头在28°攻角附近发生流动分离。
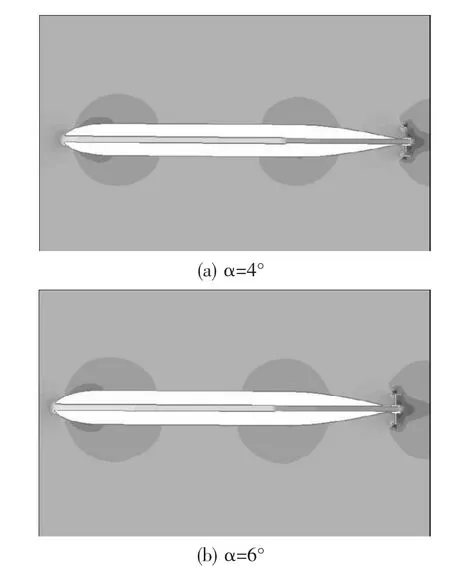
图6 XCP探头压力分布
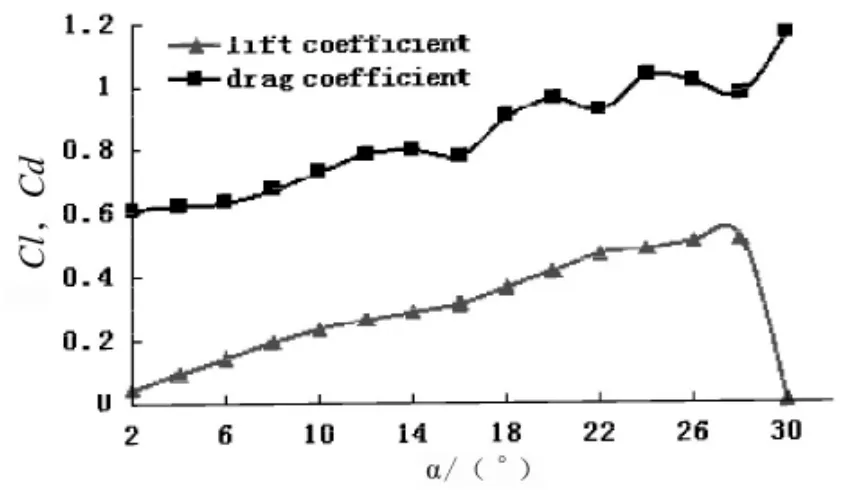
图7 XCP探头不同攻角下升力、阻力特性
图8为不同攻角下XCP探头升力变化趋势图。由图8可知,当来流冲击不同攻角探头时,升力显著增加,不利于探头垂直姿态下落。但在探头自身旋转下落过程中,由于旋转刚体定轴性和旋转产生的陀螺效应,探头对自身姿态有一定的修正作用,因此在来流通过探头尾部,攻角小于28°时,升力均有一定减少而后保持一稳定值。探头处于28°攻角时,流体经过探头后升力系数无法达到稳定趋势反而逐渐增大,可以预测,在探头倾斜度达到28°后,探头自身修正能力减小。
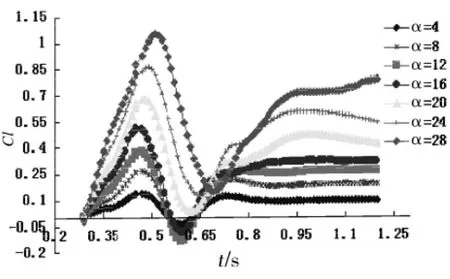
图8 升力变化趋势图
3 结论
(1)XCP探头的稳定性除了依赖其本身的外形结构,也与攻角有关。当攻角为0°时,探头周围压力分布情况对称,稳定性好;当攻角不为0°时,攻角能显著改变压力分布的对称性,且攻角越大,不对称性越明显,稳定性越差。
(2)攻角对XCP探头的水动力特性有很大影响,0°~10°攻角下,XCP探头阻力系数和升力系数随攻角增大而增加,升力系数基本成线性变化;10°~26°攻角下,XCP探头升力系数随攻角增大而增加,由于探头表面流体运动对流动分离的抑制作用,阻力系数在整体增加过程中出现局部减小;攻角在28°附近出现流动分离,阻力系数上升很快,升力系数趋近于零。
(3)旋转下落过程中,探头对自身姿态有一定的修正作用,当探头攻角小于28°时,自身修正作用较好。当探头攻角达到28°攻角时,探头自身修正能力基本消失。
[1]肖鸿,刘长根,陶建华.抛弃式温盐探头阻力系数的数值模拟及其实验验证[J].海洋技术,2006,25(3):35-37.
[2]王树军.旋转导弹横向侧喷干扰流场数值模拟[D].北京:北京理工大学,2008.
[3]童秉纲.鱼类波状游动的推荐机制[J].力学与实践,2000,22(3):69-74.
[4]B E Launder,D B Spalding.The Numerical Computation of Turbulent Flows[J].Computer Methods in Applied Mechanics and Engineering,1974,3:269-289.
[5]于勇.FLUENT入门与进阶教程[M].北京:北京理工大学出版社,2008.
[6]何文生.对转螺旋桨推进鱼类的流体动力特性数值计算研究[D].西安:西北工业大学,2007.
[7]熊天红,易文俊,吴军基,等.小攻角下水下高速航行体超空泡流特性研究[J].舰船科学技术,2009,31(5):29-30.
[8]Richard W lancaster.Brief Report on Wind Tunnel Testing of Present and New XCP[J].Bodies Sippican Ocean Systems,1982,18:2-3.
Abstract:The fluid dynamic characteristic of XCP probe was analyzed by numerical simulation at different angles of attack.The relationship between the pressure field and the movement characteristics was obtained.The influence of the drag coefficient and lift coefficient at different angles of attack around the XCP probe was also obtained.The results showed that the angle of attack can obviously change axial symmetry of flow field.At angles of attack 0°to 10°,the drag coefficient and lift coefficient of XCP probe increased with angles of attack linearly.At 10°to 26°,the lift coefficient of XCP probe increased with angles of attack.While the drag coefficient decreased in this place as the trend increased for the restraining influence of surface movement of XCP probe on the flow separation.At 28°,the flow separation phenomena happened,drag coefficient rised quickly with lift coefficient close to zero.Spin of XCP probe had fixed function to the inclined posture,when the angles of attack was more than 28°,the fixed function almost disappear.The results would provide theoretical reference for the stability study of XCP probe.
Key words:XCP probe;drag coefficient;lift coefficient;angles of attack;numerical simulation
Study on Fluid Dynamic Characteristics of XCP Probe at Different Angles of Attack
ZHANG Rui1,CHEN Wen-yi1,LIU Ning2,TAO Jin-liang1,ZHANG Man-man1
(1.Department of Process Equipment and Control Engineering,Hebei University of Technology,Tianjin 300130,China;2.National Ocean Technology Center,Tianjin 300112,China)
P716
A
1003-2029(2011)01-0037-04
2010-08-25
国家高技术研究发展计划(863)资助项目(2006AA09A304);河北省科学基金资助项目(D2009000035)
张瑞(1984-),男,硕士。研究方向:计算流体力学,过程强化。E-mail:ruizhang2008@sina.com
陈文义(1963-),教授。研究领域:工程中流体力学问题研究,可再生能源,过程强化。E-mail:cwy63@126.com