涡流调速控制系统在起重机中的应用
2011-09-23吴文平宋赛中
吴文平,宋赛中
中国二十冶集团有限公司,上海 201900
涡流调速控制系统在起重机中的应用
吴文平,宋赛中
中国二十冶集团有限公司,上海 201900
本文详细介绍了涡流电机控制器在起重机调速系统中的应用,工作原理及使用方法。
涡流电机励磁控制;涡流调速;起重机
1 概述
起重机涡流调速控制系统,主要采用和卷扬电动机同轴的涡流制动器作为控制元件,通过改变涡流制动器的励磁电流改变其制动力矩,并通过转子回路串接电阻来改变电动机的转速达到调速目的。涡流制动器的控制装置采用ZD-005型速度调节器,本装置可为涡流制动器提供一个可变的励磁电流,达到调速目的。为了提高机械特性硬度,控制系统采用电动机转子电压作为速度取样信号,进行速度闭环控制。本套控制装置为二十冶电装分公司研发的产品,可广泛应用于各种吨位的起重机提升部分的调速控制,具有更换方便、控制可靠、升降速度平稳、并大大提高了吊装作业的安全系数等优点。图1是其控制结构图。
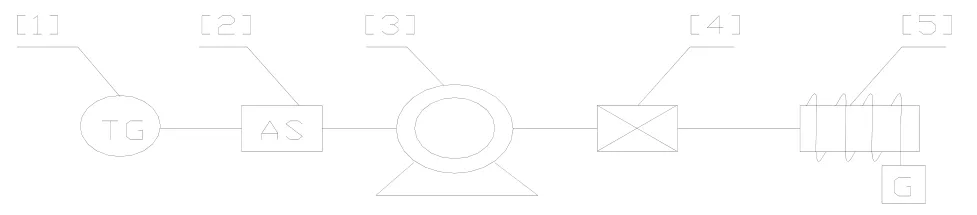
图1 涡流调速控制系统结构图
2 涡流调速控制系统的组成和工作原理分析
2.1 ZD-005型速度调节器工作原理及电路逻辑框图
从电机学可知,交流电动机的转子电压和其转速成发反比,所以通过检测电动机的转子电压,就可以反映卷扬电动机的速度实际值。本系统是利用卷扬电动机的转子电压作为速度实际值,与给定速度进行比较,由比例积分放大器形成速度闭环自动调节系统。当吊钩有一个预设定工作速度时,通过本装置控制涡流制动器励磁电流的大小,而产生相应的制动转矩来控制吊钩的工作速度,使之维持在给定的速度上,从而达到速度自动调节的目的。本系统也可以采用测速发电机作为速度反馈信号,同样可达到以上的效果。
电路逻辑框图见图2所示。
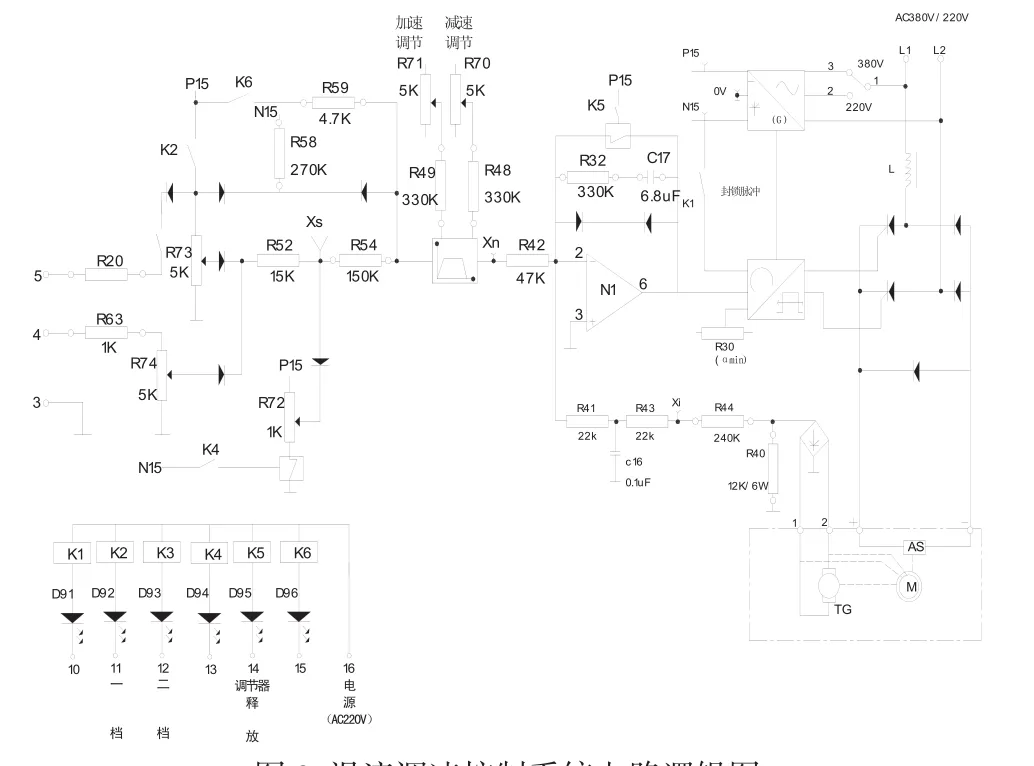
图2 涡流调速控制系统电路逻辑图
2.2 速度调节器各环节原理分析
2.2.1 主回路
主回路采用单相半控桥整流方式 。整流装置输入电压可以采用二相 AC220V或二相 AC380V。当使用 AC380V时,连接印刷线路板焊接桥L-380V;当使用AC220V时,连接印刷线路板L-220V连接。
2.2.2 速度调节装置
速度调节装置是采用比例积分(PI)调节装置。具有良好的静特性及动态响应特性,保证了系统的品质因数,其工作原理见图3。
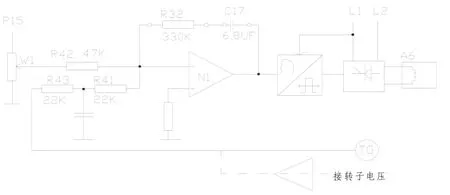
图3
W1是调节预设定吊钩工作速度给定值的电位器。经由测速发电机检测出的速度实际值UF反馈给N1输入端与给定信号比较,当卷筒实际工作速度与预设定速度出偏差时,通过N1输出脉冲移相信号,使可控硅装置输出一个与卷筒速度成正比的电流送到涡流制动器励磁线圈AS,产生制动转矩,自动调节卷筒工作速度,从而使吊钩匀速升降。图3中,R32比例系数调整,C17积分时间常数调整,通过调整 R32和C17数值可以改变调速装置的动态的响应时间 。
本装置各值整定为R41=R43=22K
C17=6.8uF
其比例系数:KP=R32/(R41+R43)
=330/44=7.5
积分时间常数:τ=(R41+R43)×C47=44×6.8 =300(ms)2.2.3 斜坡发生器电路
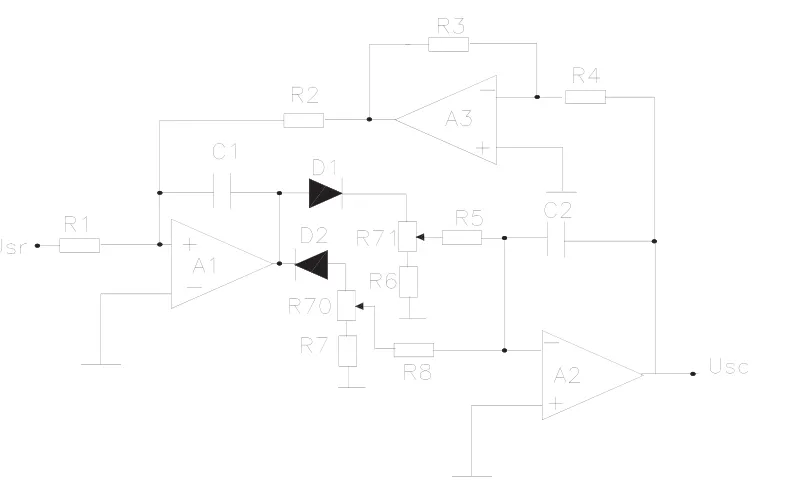
图4 斜波函数发生器控制电路
为了保证行车起动及升降速度时平稳,本装置设有斜坡发生器电路,通过调整电位计R70、R71电位计可改变加减速时间。由放大器A1、A2、A3、组成斜坡发函数生器见图4所示。斜坡时间由电阻R5和电容C5组成,R70、R71、电位器分别为加速时间和减速时间调整。加速时间t1=Usc/Usr.R5.C2(s)减速时间t2= Usc/Usr.R8.C2(s)输入电压输出Usr数值由电位器R70和R71来调整,输出电压Usc按10V来计算 。
2.2.4 电压限幅保护
本装置增加了电压限幅控制电路,它可以有效地防止涡流制动器因过压而损坏。R30为电压限幅调节电位器,调节该电位器输出电压可从80V ~240V连续可调,见图2所示。
2.2.5 输入接口控制(见图5所示)
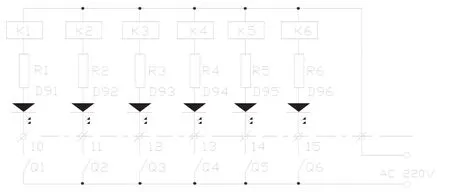
图5
K1闭合,D91灯亮,脉冲封锁;K2、 K5闭合,D92、D95灯亮1档工作;K2、K3、K5闭合,D92、D93、 D95灯亮,2档工作;K4打开,K94灯灭,极限速度限制;K5闭合,K95灯亮,调节器释放;K6闭合,K96灯亮,附加给定投入。
3 系统调试步骤
3.1 交流电源输入检查
L1、L2是装置交流主回路电源输入端子,根据需要可输入交流380或交流220V电源。当额定输入电压为交流380V时,连接印刷线路板中焊接桥 L-380V,当额定输入电压为交流220V时,连接线路板中焊接桥L-220V。通电前应仔细检查输入电压和装置设定电压是否,确认后方可通电。D11绿灯亮表示主回路电源接通。
3.2 直流输出
本装置输出端子“+”“-”直接和涡流制动器励磁绕组连接。当输入电压为AC220V时,最大输出直流电压DC150V,当输入电压为AC380V时,最大输出电压为DC240V。
3.3 测速信号(反馈信号UF)的输入
本系统是采用转子电压作为速度反馈信号,是通过分压电阻从端子1、2输入,并把印刷线路板中的焊接桥COM、 V短接。本装置也可当采用测速机作为速度信号时,应把印刷线路板中焊接桥COM、CS短接。注意当使用转子电压作为测速信号时,必须通过分压电阻输入其分压值为30V左右(在电动机堵转时的电压)决不允许转子电压直接输入,否则由于输入电压过高而烧坏控制板。
3.4 吊钩工作速度设定:(1档、2档设定)
吊钩工作速度设定可通过R73和R74来调整,R73作为 1 档速度调整,R74作为2档速度调整,端子3为调节装置OV端。可以在3、4、5端子加一电位计作为远方的速度调整,不采用远方控制时4、5端应短接。因为涡流制动器不允许高速运行,所以一般1档和2档速度按10%和20%的电动机额定速度来整定。如果通过调R73和R74电位器仍不能满足速度要求,则靠改变R54的阻值来实现。
3.5 吊钩极限工作速度预设定
为了保证吊钩在带重物下降过程中的安全,本装置设置了极限工作速度限制环节,在吊钩工作过程中可随意把其运行速度限制在最低。该控制方式的实现是通过脚踏开关或其它方式使K4继电器打开,调整R72电位计来完成所需运行速度,当不使用该功能时,应将13端和电源短接(见图5)或把R72调至最大。K6闭合作为运行速度附加给定值,用户可选择使用。
3.6 输出电压限制的设定
为保证行车从高速回到零速能快速平稳停车,且保证不使涡流制动器因过压损坏,特设R30作为电压限幅调整。调试时只使K5闭合调整R30电位计使直流输出电压为涡流制动器的额定电压。如不能满足要求可改变R34焊接桥的电阻值。当使用额定电压80V的涡流制动器时R34电阻值采用51K。
R34数值选47K电阻电压可从100V~220V连续可调,基本上能满足国产涡流制动器的需要。
3.7 吊钩下降时加、减速度的调整
使吊车满足运行条件,操作吊钩从停止运行到1档,然后再切换到2档,调整电位器R71实现升速0-1档、1-2档间过渡平稳,快慢适中,同样从2-1档,1-0档切换,调整 R70电位器使各档间减速过渡过程平稳,快慢适中。
3.8 使用转子电压反馈时的调试方法
先使行车上升或下降1档位置上,并使抱闸不动作,让电机堵转先调整滑线电阻R,使其输出30V左右(参见图6)后在把其输出和速度调节器的 1、2 端子相连,不允许在30V电压没调好时和调输出和速度调节器的 1、2 端子相连,以免电压过高烧坏电路板。最后在调整印刷电路板上的R83电位计,并用万表测量X3端子1 和3 端的输出电压,使其为OV即可。

图6
4 结论
通过以上分析可知,采用涡流调速系统控制结构简单、工作可靠、安全性能好,适用于各种吨位的起重机调速控制。其缺点是有一定的涡流损耗,不利于节能,由于它控制简单成本低,以前很多行车采用德国的MAN产品,价格是涡流调速产品的3倍,目前已逐步被我们研发产品代替,2010年已申报成果转化。目前本产品在宝钢、新疆八一钢厂、通化钢厂、梅山钢厂、广州中山发电厂、河北宣钢的起重机调速系统中被广泛应用。
[1]童诗白主编.模拟电子技术基础[M].北京:高等教育出版社,1988.
[2]佚名.可控硅的工作原理及原理图.www.elecfans.com,2010,3.
[3]钟述文.宝钢交流调速应用现状及思考.仪器仪表交易网,2005,4.
TH21
A
1674-6708(2011)36-0154-02
