目标飞行器测控与通信分系统
2011-09-18王乃雯石云墀
王乃雯,石云墀
(上海航天电子技术研究所,上海 201109)
0 引言
作为交会对接任务的关键系统之一,目标飞行器测控与通信分系统完成目标飞行器各飞行阶段的跟踪测轨、双向话音通信,以及图像传输,数据传输,各设备的遥测、遥控任务,并与飞船配合完成交会对接相对测量和通信任务。本文介绍了我国目标飞行器测控与通信分系统的功能、构成、性能与特点,可靠性设计。
1 分系统组成与功能
目标飞行器测控与通信分系统主要由USB、S波段数传、遥测、遥控、话音、图像、高速通信、空空通信、天线、卫星定位和中继等子系统组成。测控与通信分系统主要功能有:
a)能配合地面站对目标飞行器进行跟踪、测轨;
b)可利用卫星导航系统获取导航定位参数,能直接向追踪飞行器传输数据;
c)实现遥控、转发数据注入及数据组帧与传输;
d)为目标飞行器提供低速及高速双向通话;
e)为目标飞行器提供高质量双向视频服务;
f)通过S波段数传系统,为目标飞行器提供平台遥测和中低速视频服务;
g)可在舱内、舱外摄像;
h)为目标飞行器提供频率基准;
i)为目标飞行器提供高速数传,支持中继Ka波段链路的前反向传输;
j)交会对接段配合运输飞船完成交会测量任务;
k)交会对接段与运输飞船建立直接链路进行双向通信;
l)组合体飞行段对组合体的跟踪测量与通信。
2 性能与特点
2.1 USB子系统
USB子系统主要包括USB应答机a/b、USB天线网路、USB发射天线、USB接收天线等。为保证可靠性,共配置异频应答机2台,双机热备份模式工作,USB子系统组成如图1所示。
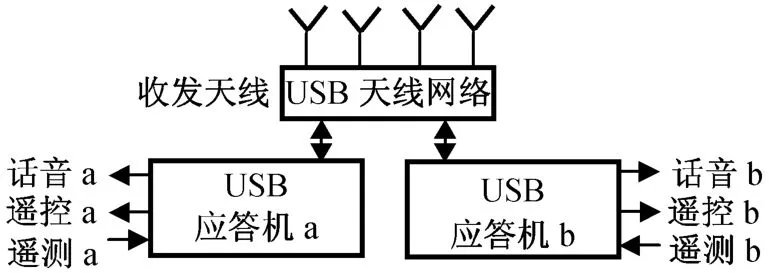
图1 USB子系统组成Fig.1 USBtranspandor subsystem
除传统的跟踪、测距和测速外,USB应答机还传输上行遥控、上行话音和下行工程遥测信号。USB应答机采用相干转发方式,即上行遥控、测距音、话音副载波调制在一个载波上,应答机接收到上行信号后,进行解调,将遥控、话音副载波送相应终端处理,上行载波按一定比率变频成下行载波,同时对遥测、测距音等副载波进行调制并发射出。应答机的工作模式见表1。
USB网络完成2台应答机对天线的组阵控制和共用隔离。

表1 USB应答机工作模式Tab.1 Operation modeof USB transpandor
2.2 S波段数传子系统
S波段数传子系统由S波段数传机2台,以及数传接口、数传天线网络与数传天线等组成,2台数传机冷备份工作,数传接口内部双机冷备份,S波段数传子系统如图2所示。
S波段数传机采用四相差分相移键控(DQPSK)调制方式。其中:Q支路下传来自高速数据复接器的数据,I支路传输两路图像及伴音。调制后信号经数传天线网络连接到S波段数传天线。S波段数传机a、b共用S波段数传天线,通过天线网络进行切换。数传接口接收来自图像设备及高速数据复接器的数据,同步后送数传机。
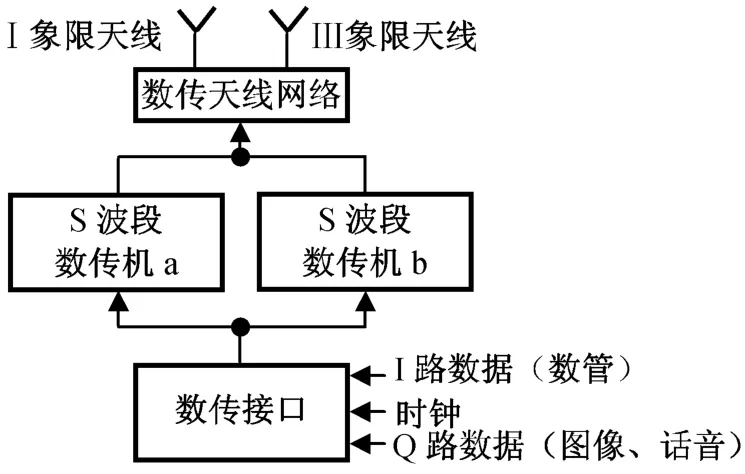
图2 S波段数传子系统Fig.2 S-band data transmission subsystem
2.3 遥测子系统
遥测子系统在实验舱配置遥测调制器1台,采集数管,制导、导航与控制(GNC)及遥控解调器的数字量遥测数据,复接、组帧工程遥测数据,将组帧后的数据进行DBPSK调制,分别送2台USB应答机,同时将未调制的工程遥测帧送空空通信接口和中继S终端。遥测调制器内部采用双机热备份。
2.4 遥控子系统
遥控子系统由遥控解调器、遥控指令译码单元a(实验舱)、b(资源舱)等组成。其中:遥控解调器实现指令译码、指令分配和数据注入校验、分配;遥控指令译码单元a、b完成指令译码和分配。遥控指令可通过USB信道、中继S波段信道、中继Ka波段信道传输,在交会对接阶段还可通过空空通信机转发至目标飞行器。为避免接收不同通道的遥控信号的冲突,遥控解调器在同时接收到多个通道遥控信号时,按优先级选择来自不同信道的遥控指令。遥控子系统如图3所示。
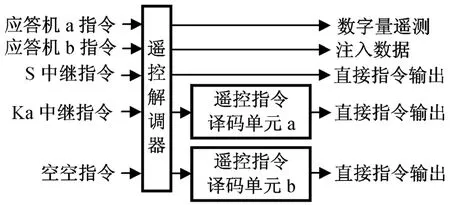
图3 遥控设备Fig.3 Remotecontrol subsystem
由于目标飞行器指令数量较载人航天工程一期增加较多,为增大指令空间、加大指令编码间码距,同时尽可能避免测试码表和任务码表的重叠,遥控编码方式采用24位编码,编码后的码距可达3~4。为提高设备可靠性,遥控直接指令识别和校验功能采用全硬件方式实现。同时为便于遥控设备地面测试,遥控设备内部设计有码表2套,即任务码表和测试码表,可适应不同的测试状态。
2.5 话音子系统
话音子系统由话音处理器1台、头戴送受话器3个和话音环回插头(无人时使用)2个组成。形成天地话音回路2条:一是USB信道与S波段数传信道构成的低速天地话音链路,另一是中继Ka波段前向与中继Ka波段反向信道构成的天地高速话音链路。话音子系统如图4所示。
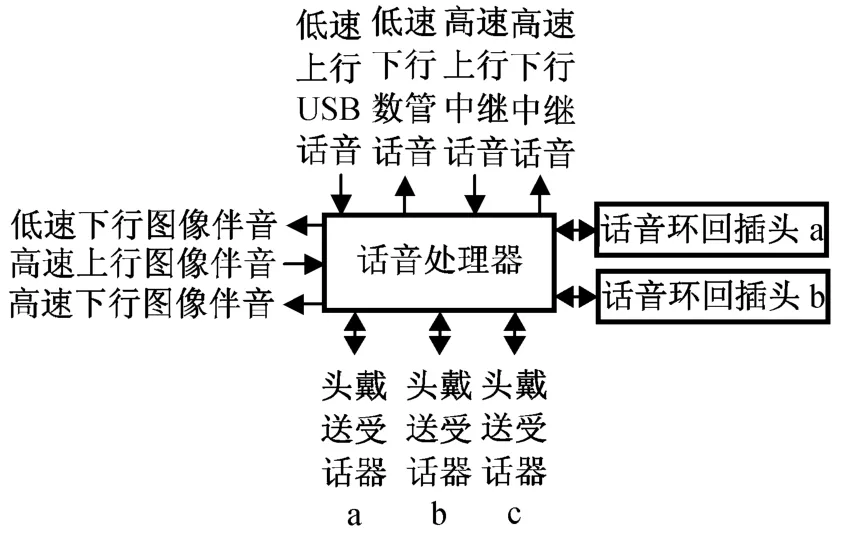
图4 话音子系统Fig.4 Audio subsystem
目标飞行器话音通信子系统低速话音链路使用低速先进多带激励(AMBE)编码算法(码速率8 kb/s),这是一种能在较低速率时提供较高语音质量的语音压缩算法,同时还具较高的对背景噪声和信道差错容错的能力。与载人航天一期使用的自适应差分脉冲调制(ADPCM)算法相比,码速率降低了50%,话音质量略有提升。高速话音链路使用高速高质量的先进音频编码(AAC)编码算法(128 kb/s),能提供天线语音通话和高保真音乐传输。
实验舱内配头戴送受话器插座6个,分别用于供3个航天员的任务通话接入和3个专用话接入。头戴送受话器将接收的各航天员话音送话音处理器进行编码,同时接收话音处理器送出的解码话音,头戴送受话器的频率响应性能较宽(150~15 000 Hz)。话音通信子系统支持多个通信送受话器,不同天地通信信道、两种编码体制,可通过优选器或手动选择话音质量较好的通道。
低速上行USB话音、低速下行数管话音、高速上下行中继话音均为时分复用信号,各含有数字话音2路,通过USB上行信号、S波段数传信道Q支路、Ka波段中继前反向信道进行传输。低速下行图像伴音、高速下行图像伴音为单路数字话音,经图像子系统与数字图像复/分接后由S波段数传信道I支路、Ka波段中继前反向信道进行传输。
高、低速话音通道均设有密话功能,启用密话时会在话音帧的特定位置填充话音密钥。由话音设备内部专用加解密模块对话音加解密。话音设备明密工作状态可通过遥控指令进行切换,切为密态后下行话音将被加密。上行信号明密状态由话音处理器自动识别,根据上行信号的内容决定是否送加解密模块进行解密处理。
目标飞行器自主运行期间,话音环回插头将上行话音的音频信号环回地面,完成话音子系统的自检。在需要进行天地通话时,用头戴送受话器替代话音环回插头进行通话。
2.6 图像子系统
图像子系统由舱内摄像机2台、舱外摄像机1台、太阳翼摄像机1台、视频处理器1台、视频编码器1台和视频切换器1台等组成。构成天地图像通路2条,一路为S波段数传机中低速反向图像通路,实现中低质量下行图像传输,一路为中继终端前反向图像回路,实现高速高质量的图像上下行传输。图像子系统如图5所示。
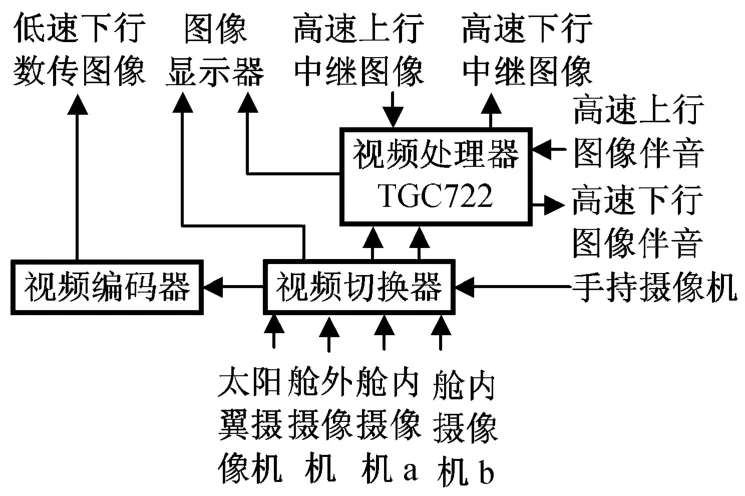
图5 图像子系统Fig.5 Video subsystem
图像子系统设有摄像机通道5路,其中舱外摄像机1路,舱内摄像机2路,手持摄像机1路和太阳翼摄像机1路。为满足任务摄像需要,舱外固定摄像机布局在实验舱外柱段Ⅳ象限(偏Ⅰ象限20°),可完整拍摄交会对接过程。实验舱外正Ⅲ象限安装太阳翼摄像机,实验舱内安装舱内摄像机2台,舱内摄像机b拍摄对接通道,舱内摄像机a拍摄液晶显示器且安装位置可调。配置视频切换器1台、视频处理器1台、视频编码器1台,实现图像的5路选2路切换。
图像子系统采用基于MPEG-4(ISO/IEC DIS 14496-2)标准的图像压缩算法,根据不同链路选择不同质量的压缩算法。
视频处理器对高速高质量图像进行编码,对接收的2路视频模拟信号分别作A/D变换,编码压缩,并与话音处理器的1路192 kb/s的话音数据复接,形成3 840 kb/s的图像及伴音数据流送高速通信处理器,经中继Ka波段反向信道传输回地面。视频处理器同时接收来自中继前向信道的图像及伴音信号1路,完成解码、D/A变换后恢复为模拟视频信号送仪表显示器。与载人航天一期工程相比,其图像码速率更高,图像更清晰,并提供了上行图像通道。
视频编码器对低速中低质量图像进行编码,将接收的2路视频模拟信号进行2路视频模拟信号的A/D变换,编码压缩,同时与接收到的1路16 kb/s的话音数据复接,形成768 kb/s的图像数据流送S波段数传机,通过S波段数传I支路下行传输。视频编码器为单/双副图像编码器,可根据地面监视图像的需要选择单幅模式(736 kb/s图像数据1路+16 kb/s话音数据1路)或双幅模式(360 kb/s图像数据2路+16 kb/s话音数据2路)输出。
视频切换器将舱外摄像机1台、舱内摄像机2台和手持摄像机的视频模拟信号送仪表分系统的显示器,由航天员自行选择其中的视频图像进行监视。
2.7 高速通信子系统
高速通信子系统由高速通信处理器1台等组成,是目标飞行器上下行高速数据的处理中枢。其中:上行信道处理模块接收来自中继终端的传输帧,进行同步识别、解随机化,R-S译码,判别传输帧标识符后将遥控数据、仪表注入数据、话音和图像数据由各自的输出接口送指定用户;下行信道处理模块接收数管复接、生理遥测、图像及伴音、话音、有效载荷、延时遥测等,动态调度传输帧,进行R-S编码和编码交织、随机化、加同步字,形成统一数据流传输帧送中继终端。处理器接口关系如图6所示。
高速通信处理器采用基于CCSDS标准的先进高级在轨系统(AOS),码速率高达144 Mb/s,并可根据实际需求进行速率切换;采用先进的虚拟信道调度策略,信道利用率大于98%,且可在轨切换各虚拟信道的优先级;为保证图像与话音信号的连续流畅,通过合理的平滑算法对该两路数据进行平滑处理,既保证了信道的延迟最小,又保证了平滑处理的可靠性;通过合理的调度与错误控制机制,使飞行器在某路信道发生故障后重新建立传输而损失的数据永远小于1帧,既能确保信道连接的可靠性,又保证了空间应用数据最大化传回地面。
2.8 空空通信子系统
空空通信子系统由空空通信机2台、空空通信接口1个和空空通信天线2副组成,实现与载人飞船的双向通信。2台空空通信机通过空空通信接口与其他设备进行数据通信,每个空空通信机连接一个收发共用空空通信天线。空空通信子系统框图如图7所示。
在交会对接段(100 km~0 m),目标飞行器与载人飞船的空空通信设备建立双向空空直接链路。目标飞行器将GPS和GLONASS兼容机(GNSS)数据及工程遥测数据(含GNC姿态数据)发送至载人飞船,同时目标飞行器的空空通信机接收载人飞船转发的遥控指令、注入数据,解调后将遥控数据帧送遥控解调器。
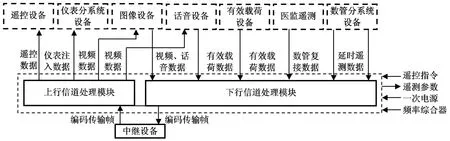
图6 高速通信处理器接口关系Fig.6 AOS interface

图7 空空通信子系统Fig.7 Space to space communication subsystem
空空通信机采用直接序列扩频体制,a、b机的收发频率相同,通过不同扩频序列进行码分多址;为提高信道容错能力,采用R-S编解码进行纠错处理;中频部分采用基于软件无线电技术的数字化解扩解调方案,从中频对模拟信号进行采样数字化,之后所有处理均在数字域内完成,具有硬件平台通用、调试简单、受环境影响小的优点。
由于空空通信的通信距离为100 km~0 m,信号衰减变化大于100 dB。为防止因接收机饱和导致灵敏下降,空空通信机发射功率设计为两档,在不同距离内根据遥控指令进行切换。
2.9 天线子系统
天线子系统包括天线8副和天线网络2个。其中:天线包括USB接收天线2副、USB发射天线2副、S波段数传天线1副、GNSS接收天线1副、北斗二号(BD2)双频天线1副和中继天线1副;天线网络包括USB天线网络和数传天线网络。
USB接收与发射天线实现USB应答机信号的接收与发射。在上升段及运行段姿态变化较大时,2副天线组阵工作,扩大信号覆盖范围;在运行段常仅用1副天线工作。由USB天线网络实现天线的切换以及USB应答机a、b对信号的接收与发射。
S波段数传天线实现对S波段数传机信号的辐射。通过数传天线网络可在数传天线与S波段数传机a、b间切换。GNSS接收天线接收GNSS卫星信号,BD2双频天线接收BD2/GPS卫星信号。
空空通信天线a、b为收发共用天线,分别与各自的空空通信机相连,采用不同的旋向极化方式进一步提高2条空空通信信道间的隔离度。同时,该天线还具有增益高、方向宽的特点,最大方向角可达±72°。
3 可靠性设计与验证
目标飞行器测控与通信分系统各单机研制始于2005年,至2011年天宫一号目标飞行器和神舟八号飞船发射,历时7年。各单机的设计考虑了机、电、热、抗辐照、电磁兼容(EMC)、元器件降额,以及安全性等多因素,采取了措施提高产品可靠性。对关键单机采用系统冗余备份,如USB应答机、遥测、遥控、空空通信设备的双机热备设计,S波段数传机、高速通信处理器的双机冷备份设计,话音、图像设备的上下行多通道设计,均能在个别单机或通道发生故障时切换至其他单机或通道工作。
为验证产品的可靠性,各单机设计完成后,均按规定经历了振动、冲击、加速度、热循环、热真空、真空放电、EMC、静电放电敏感度(ESD)、综合应力、拉偏、地面压力、交变湿热、老练等试验,通过了所有鉴定试验。试验结果表明:产品可靠性设计合理,可满足产品飞行环境要求。
4 结束语
随着天宫一号目标飞行器的成功发射和与神舟八号飞船/天宫一号目标飞行器两次交会对接的成功,目标飞行器测控与通信分系统圆满完成了在轨测控通信任务。飞行结果显示,轨道测量准确,遥控指令及时有效,舱内外图像画面清晰,话音清晰可懂,空空通信链路稳定,遥测数据采集正确圆满。该分系统的研制成功,标志着我国载人航天工程取得了新的重大进步。