人眼角膜曲率参数亚像素测量系统的设计❋
2011-09-11赵俊奇段培华郭智勇刘海峰
赵俊奇,段培华,郭智勇,刘海峰
(1.中北大学光电厂,山西太原 030051;2.中北大学信息与通信工程学院,山西太原 030051)
0 引 言
角膜是眼球前面一层透明组织,是眼屈光系统中最大的折射面和重要的屈光装置,具有光滑、无血管等特性.但角膜出现病变时,屈光率就会发生变化,出现散光等现象[1-2].因此,人眼角膜曲率参数的精确测量在医学上有重要意义.
测量人眼曲率半径和角膜散光的轴向及光焦度的仪器称角膜曲率仪.角膜曲率仪分为光机式和全自动光机电测量式(简称自动式),我国传统中使用的是光机式角膜曲率仪,它具有结构简单,通过光学对准,人眼观测,刻度读数,测量速度慢,测量人为因素大,依赖操作经验强等特点.近年来,随着光电技术的发展,国外研制出来自动光机电测量式角膜曲率仪,能够快速、准确、客观地自动测量人眼角膜屈光参数.它完全排除了操作者的主观因素,更准确、快速地反映了人眼的光学特性,已成为验光技术发展的方向,对图像的处理方法如拓普康采用二值化后直接扫描的重心法,这种方法对图像成像质量要求高[3-5];国内薛烽等采用曲波变换提高图像计算精度[6],这种方法降低了对光学成像质量要求,但算法繁琐,不易实际使用;还有基于空间距的细分算法等亚像素算法[7],这些算法都比较复杂,不易在嵌入式系统使用,本文在研究国内外该技术发展的基础上,采用插值处理方法,既降低了对光学成像质量的要求,又简化了算法,具有实际意义.
1 光学测量原理
角膜中央表面好像是一个凸面镜,人眼角膜曲率参数测量就是利用人眼的这一光学特点,将一束圆环投射到人眼角膜表面,反射后经光学系统成像在 CCD上.由于眼角膜的屈光状态不一致,测量圆环在CCD上成像的大小、形状也不一样.如果是单纯近视或远视眼,在 CCD上成大小一定的清晰的圆环,而若是散光眼,则成清晰的椭圆.通过 DSP电子系统对其处理便可算出人眼角膜的曲率参数.
图1是角膜测量光学原理图.由发光二极管照亮角膜测量目标圆环,角膜测量目标圆环投射到人眼角膜上,经人眼角膜前表面反射,经角膜摄像透镜组和小孔光阑,在角膜测量 CCD上得到清晰的角膜反射圆环(或椭圆环)图像,CCD和眼角膜处于共轭位置.通过对圆环(或椭圆环)图像的处理、分析计算得出角膜曲率半径及角膜屈光度值.
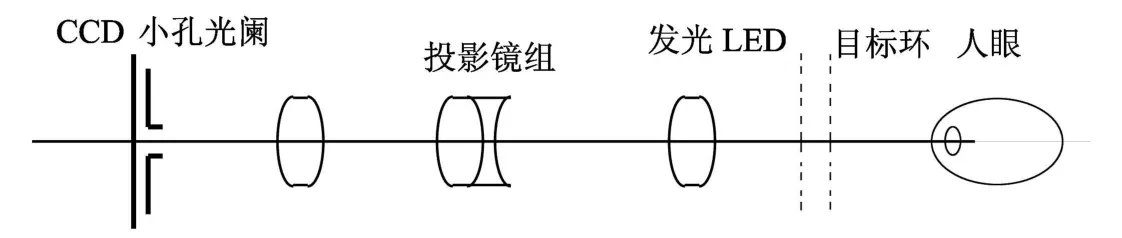
图1 光学测量原理图Fig.1 Optical schematic diagram
2 角膜曲率参数的处理方法
人眼角膜屈光参数测量的电路采集处理的作用就是将在 CCD上成的模拟图像信号经二值化电路转换为数字信号存入 SRAM,由 CPU对存入 SRAM的图像进行插值计算,从而得出被检眼的屈光度值[8-10].
2.1 角膜曲率参数的计算原理
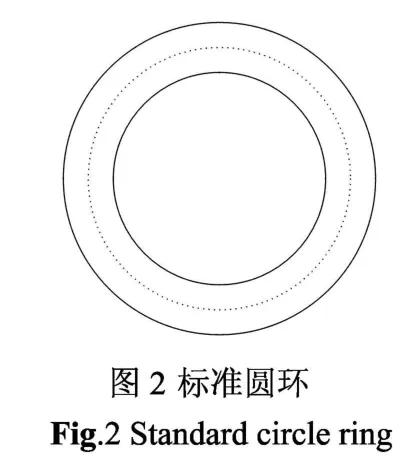
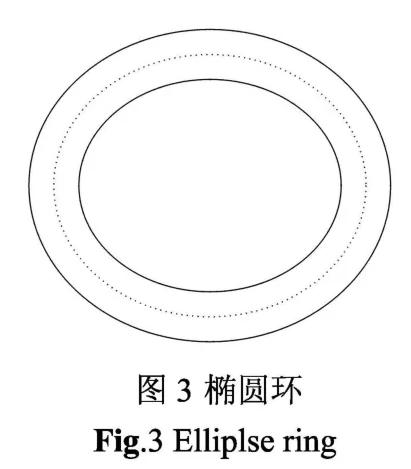
图2,图 3就是人眼角膜反射环的图像,如果角膜没有散光就成像为图 2的标准圆环,如果角膜有散光就成像为图 3的椭圆环.通过计算圆环的半径或椭圆环的长、短轴就可计算出角膜的曲率半径.

式中:R1为角膜水平方向曲率半径,mm;l1为角膜水平方向曲率半径,像数;R2为角膜垂直方向曲率半径,mm;l2为角膜垂直方向曲率半径,像数;A为散光光轴;k1为系数;θ为椭圆的长轴或短轴角度.
式(4)是角膜曲率半径与屈光度值的转化公式

式中:D为角膜屈光度值;n为角膜折射率(一般为 1.3375);r为角膜曲率半径.
将 R1,R2代入式(4)就可算出角膜水平方向屈光度 D1和角膜垂直方向屈光度 D2,角膜的散光用 C表示.散光的角度还是 A.

行业中角膜曲率半径的精度为±0.02 mm,对应的像数就是 0.2个像数要求.
2.2 插值圆环(或椭圆环)质心计算方法[11-12]
质心坐标计算公式

质心算法特别适合于对称图形的中心计算,算法的优点在于充分利用了每一点的灰度值,具有较高的精度.但角膜环的边缘为阶跃边缘,在实际选取阈值截取图像时会将图像边缘不均匀的分布点截取,这会对质心坐标的精度产生影响.
为了进一步提高质心坐标的计算精度和稳定性,在此提出了利用插值,增加计算点数的方法计算质心坐标.随着插值原理中 n的增大,质心计算精度不断提高,这样就可减小图像边缘分布对计算中心的影响,这里不再推导论证.这种线性插值的原理如图 4中f(u,v)在 f(i,j),f(i+ 1,j),f(i,j-1),f(i+ 1,j-1)之间插值.
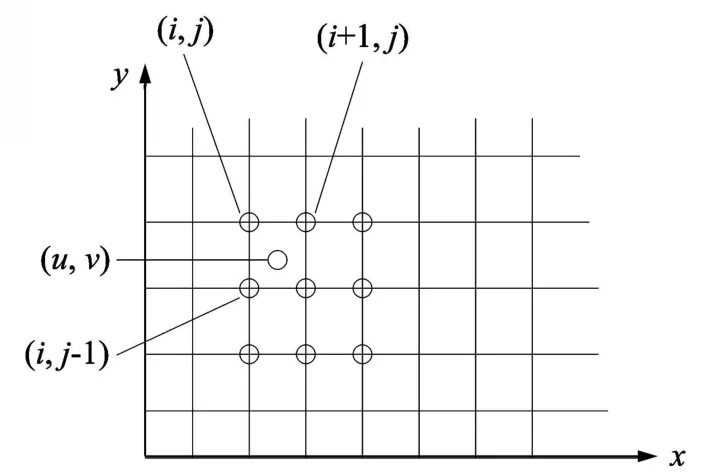
图4 插值原理图Fig.4 Interpolation algorithm principle

式中:i= [u],j=[v],i,j是不超过 u,v的最大整数;T=u-[u],U=v-[v].
由此可得出插值后的质心坐标计算公式

式中:m为插值点数.尤其注意的是必须对称插值才能提高计算精度.
2.3 插值法计算角膜曲率半径[13]
由于角膜反射环的质量不错,在计算中心坐标时增加了插值坐标,在计算圆环(或椭圆)半径时继续使用插值法.计算公式为

3 实验结果
本系统中选用高速 DSPTMS320F2812可以方便地实现插值,为了提高计算速度,角膜成像仅在中央区域,可以在一定范围内进行这两项运算.本系统每 0.2个像素表示 0.02 mm的曲率半径精度,因此中心坐标和曲率半径不能超过 0.2像素.实验用曲率半径是 7.00 mm的标准模拟眼比较了在不用插值方法(用 A表示)、使用插值方法(用 B表示)质心坐标计算和曲率半径计算的情况.
3.1 质心坐标计算结果分析
表1给出了在上述两种情况下 10组数据的中心坐标 X,Y的结果
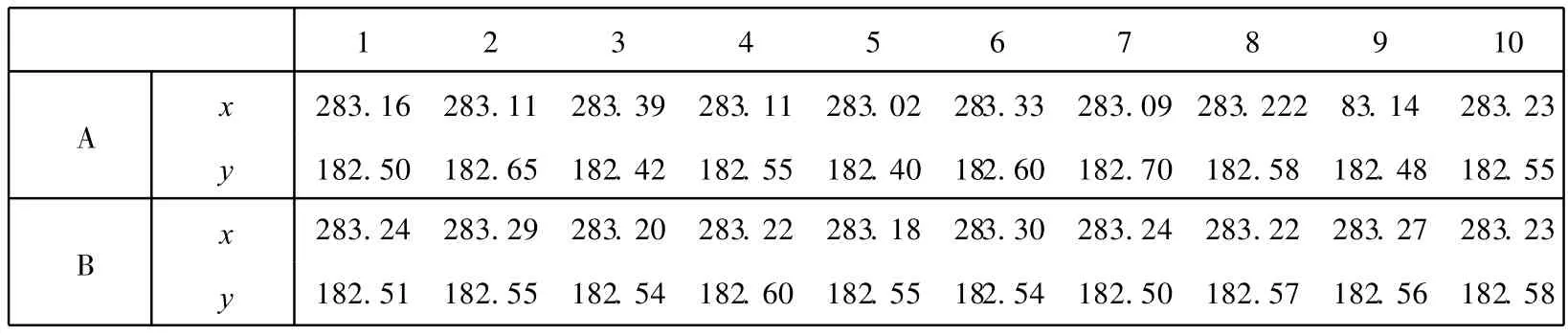
表1 质心坐标计算结果Tab.1 Calculation results of centroid coordinate
3.2 曲率半径计算结果分析
表2给出了在上述两种情况下 10组数据的椭圆长、短轴 RL,RS数据.由于用曲率半径是 7.00 mm的标准模拟眼实验,因此结果应该是 RL,RS基本相等,误差在 0.1个像数以内.
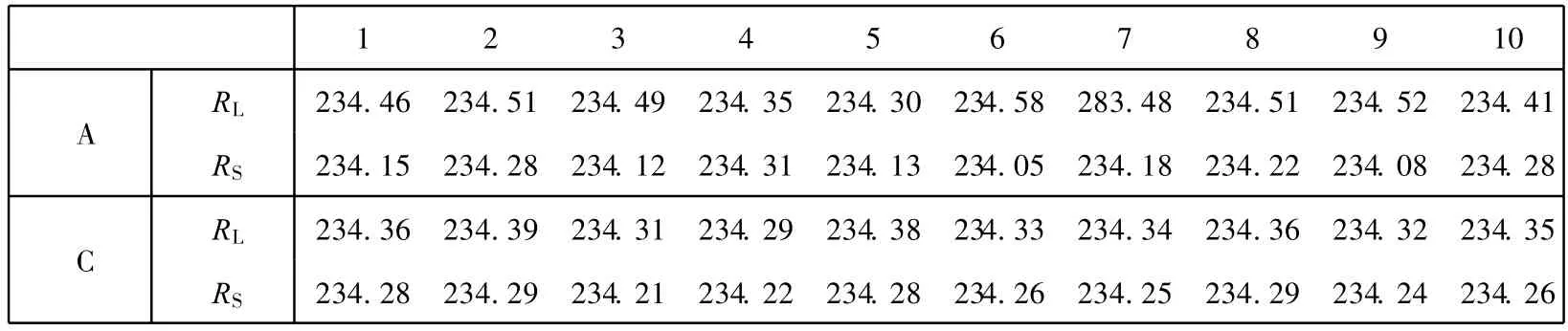
表2 曲率半径计算结果Tab.2 Calculation results of currature radius
4 结 论
本文从精确测量眼角膜的曲率半径和屈光度出发,设计了一套角膜光学测量系统.利用红外圆形靶环投射到眼睛,经投影镜组成像在 CCD上,提高了系统的抗杂散光干扰能力,采用插值算法增加了系统的测量数据,保证了中心和半径的计算精度,使系统能实现 0.2个像素级测量.
[1]Howland H C,Bradford H.Photorefraction:a technique for study of refractive state at a distance[J].Opt.Soc.Am(S0740-3232),1974,64(2):240-249.
[2]Choi M,Weiss S,Schaeffel,et al.Laboratory,clinical,and kindergarten test of a new eccentric infrared photorefractor(powerrefractor)[J].Optometry and Vision Science(S1040-5488),2000(19):2363-2373.
[3]赵俊奇.人眼屈光度客观式测量的图像采集处理研究 [J].光学技术,2002,28(4):293-295.Zhao Junqi.A study on acquisition and processing for objective diopteric measurement of eye[J].Optical Technique,2002,28(4):293-295.(in Chinese)
[4]赵俊奇,陈安世,郭智勇,等.边缘检测眼底图像屈光度测量的研究 [J].计算机工程与应用,2011,47(9):204-206.Zhao Junqi,Chen Anshi,Guo zhiyong,et al.Research on diopter measurement of detecting edge of eye retina image[J].Computer Engineering and Applications,2011,47(9):204-206.(in Chinese)
[5]赵俊奇,陈安世,郭智勇,等.基于图像处理的眼屈光度客观测量系统 [J].中国组织工程研究与临床康复,2010,14(48):9020-9023.ZhaoJunqi,Chen Anshi,Guo Zhiyong,et al.Objective measurement system of eye diopter based on image processing[J].Journal of Clinical Rehabilitative Tissue Engineering Research,2010,14(48):9020-9023.(in Chinese)
[6]薛烽,李相宁.一种基于图像处理的屈光度测量方法[J].光电工程,2009,36(8):62-66.Xue Feng,Li Xiangning.Diopter measurement based on pupil images processing[J].Opto-electronic Engineering,2009,36(8):62-66.(in Chinese)
[7]欧阳高飞,邝泳聪,谢宏威.基于亚像素定位的贴装元件精确取像技术[J].光电工程,2010,37(6):16-21.Ouyang Gaofei,Kuang Yongcong,Xie Hongwei.Accurate image capture for surface mounting component based on subpixel location[J].Opto-electronic Engineering,2010,37(6):16-21.(in Chinese)
[8]张虎,达鹏飞,李青,等.椭圆目标的亚像素边缘定位方法研究[J].光学技术,2010,36(1):66-74.Zhang Hu,Da Pengfei,Li Qing,et al.Methods of sub-pixel egde location for ellipse[J].Optical Technique,2010,36(1):66-74.(in Chinese)
[9]戴百川,刘成.椭圆物体位置与形状参数求解 [J].中国新通信,2009(12):79-81.Dai Baichuan, Liu Cheng. Solving the location and shape ofoval-shaped objects[J]. China New Telecommunications,2009(12):79-81.(in Chinese)
[10]马文科,王玲,何浩.一种纸纹图像的局部阈值分割方法 [J].计算机工程与应用,2009,45(34):177-179.Ma Wenke,Wang Ling,He Hao.Local threshold segmentation algorithm for fingerprint images[J].Computer Engineerand Applications,2009,45(34):177-179.(in Chinese)
[11]张之江,车仁生,黄庆成.测头成像视觉坐标测量系统中特征点成像中心获取[J].光学精密工程,1998,10(5):12-17.Zhang Zhijiang,Che Rensheng,Huang Qingcheng.Centroid of characteristic point image obtain in probe imaging vision coordinate measuring system[J].Optics and Precision Engineering,1998,10(5):12-17.(in Chinese)
[12]侯成刚,杨文献,屈梁生.一种检查快速检测圆心的抗噪声亚像素算法[J].光学学报,1998,4(4):481-485.Hou Chenggang,Yang Wenxian,Qu Liangsheng.A robust subpixel algorithm for the center of circle detecting[J].Acta Optica Sinica,1998,4(4):481-485.(in Chinese)
[13]屈玉福,浦昭邦,王亚爱.视觉检测系统中亚像数边缘检测技术的对比研究[J].仪器仪表学报,2003,8(8):460-462.Qu Yufu,Pu Zhaobang,Wang Yaai.Contrast study of subpixel edge detections in vision measuring system[J].Chinese Journal of Scientic Instrument,2003,8(8):460-462.(in Chinese)
