图像制导弹仿真训练系统研究❋
2011-09-11陶声祥
陶声祥,沈 欢
(1.解放军炮兵学院 一系,安徽 合肥 230031;2.解放军炮兵学院 五系,安徽 合肥 230031)
仿真训练系统是制导武器系统研制过程中最有效的技术手段之一,它能提高武器系统训练质量和克服实际设备培训的不足,使训练工作更科学化并降低训练费用,从而大大提升培训效益,因此各类制导武器仿真训练系统更是受到了广泛的重视[1-6].
图像制导是由安装在制导弹上的导引头,根据获取的图像信息形成导引指令,进而实现目标捕获与跟踪和对制导弹控制的一种制导技术.图像制导武器系统通常用于攻击地面目标,在攻击过程中易受气象条件和光景噪声的影响,对目标的识别和跟踪都比较困难.根据仿真技术的发展和国内外实际应用的经验来看,仿真试验是制导武器系统研制中最经济和最有效的技术手段,虽然国内很多家单位也都在积极、独立地进行研发制导弹仿真训练系统,如文献 [7]和 [8]介绍了成像制导和红外制导半实物仿真系统、文献 [9]和 [10]对图像捕控指令制导半实物仿真系统进行了研究、文献 [11]详细阐述了电视制导导弹武器系统精确打击仿真实验系统,但这些基本上都是采用计算机仿真目标场景和模拟制导弹质心位置的二自由度运动平台.为了满足图像制导武器系统的科研需求和教学工作,迫切需要一套能够对图像类制导弹武器系统的测试和训练进行仿真的平台,综合考虑图像类制导弹武器系统发展趋势,本文研制与设计了具有制导弹三维空间质心运动规律仿真、导引头六自由度图像数据采集、变换沙盘地形目标场景等关键技术的实景图像制导弹仿真训练系统,该仿真训练系统在国内外还未见报道.
1 系统设计原则及功能
1.1 系统设计原则
在进行图像类制导弹导引头的控制系统调试和训练过程中,如果要求从空中获取运动图像,要么是通过实弹射击的方式,要么采用虚拟仿真或者动画的方式来实现.前一种方式耗费的代价太大,而后一种方式其军事目标和战场地理环境的立体感不强.针对图像制导弹的实景作战仿真训练对其模拟的真实程度有一定的要求,本文研制与设计的“图像制导弹实景仿真训练系统”采用了三轴联动技术模拟图像类制导弹的三维空间姿态和运动轨迹以及用变幻沙盘中微缩版的三维地形和各种军事目标取代计算机模拟出来的虚拟场景.该系统可以为图像类制导弹导引头提供立体感更强、目标空间距离变化更明显的视频信号,从而为图像类制导武器系统的测试和训练提供更好的支持,是一种集多种功能于一体的比较完备的仿真训练系统.
1.2 系统功能要求
图像制导弹仿真训练系统是利用微缩版的沙盘三维地形和各种军事目标立体模型替代计算机模拟出来的虚拟场景,更逼近真实情况从而可以取得更好效果,在该系统中地形模型可为图像类制导弹导引头的测试和训练提供了很大的方便;图像采集与轨迹控制系统也可根据弹道的不同运动轨迹获取不同视频场景,用来优化控制模型、改进图像跟踪识别算法[12]和调整控制传递参数等,从而综合提高制导系统的命中精度实现精确打击,并为图像类制导武器系统的开发、教学和训练提供实验支持.
2 系统组成及工作原理
2.1 系统组成
图像制导弹仿真训练系统是由上下两大模块组成:图像采集与轨迹控制系统;变幻沙盘与沙盘控制系统.系统总体结构如图 1所示.
2.2 系统工作原理
系统中弹道轨迹控制子系统通过控制 X,Y方向齿条和 Z方向伸缩杆作为终端执行的导轨,具体控制和模拟制导弹三维空间质心运动轨迹;图像采集子系统在与轨迹运动子系统相结合并通过云台的旋转可实现导引头(摄像头)六自由度图像数据采集;沙盘子系统通过控制沙盘中方块的运动,模拟实现战场环境的地形场景变换.以上 3个子系统相结合即可实现图像制导弹仿真训练系统的功能,对其控制和操作就可进行制导弹三维空间质心运动规律仿真、导引头六自由度图像数据采集和实际战场地形模拟及变换.

图1 系统总体结构图Fig.1 Diagram of general structure of the system
3 系统关键技术及其实现
3.1 制导弹三维空间质心运动轨迹仿真
该仿真训练系统的图像制导弹制导仿真模型是采用基于六自由度导弹运动数学模型[13].
1)弹体质心运动的动力学方程
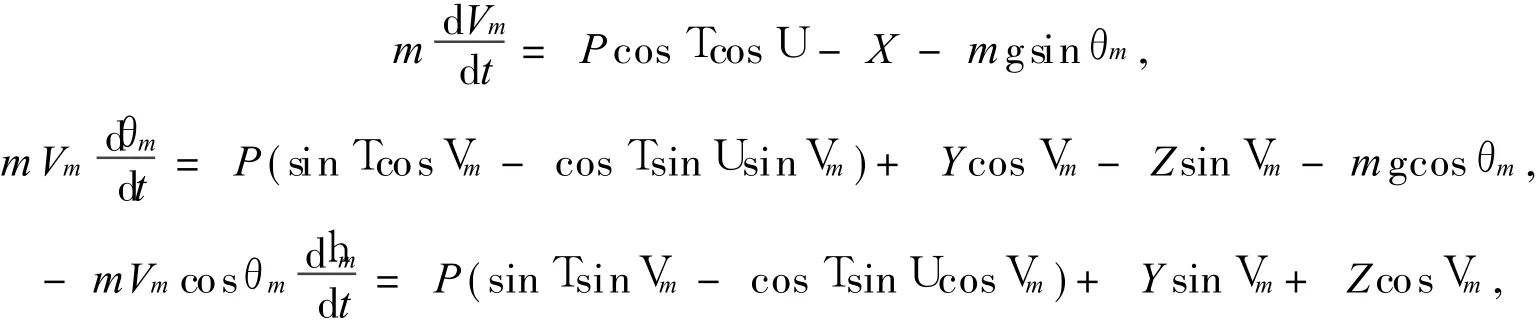
2)弹体绕质心运动的动力学方程

3)导弹质心运动学方程

4)导弹绕质心运动学方程

5)导弹各角度之间的几何关系式

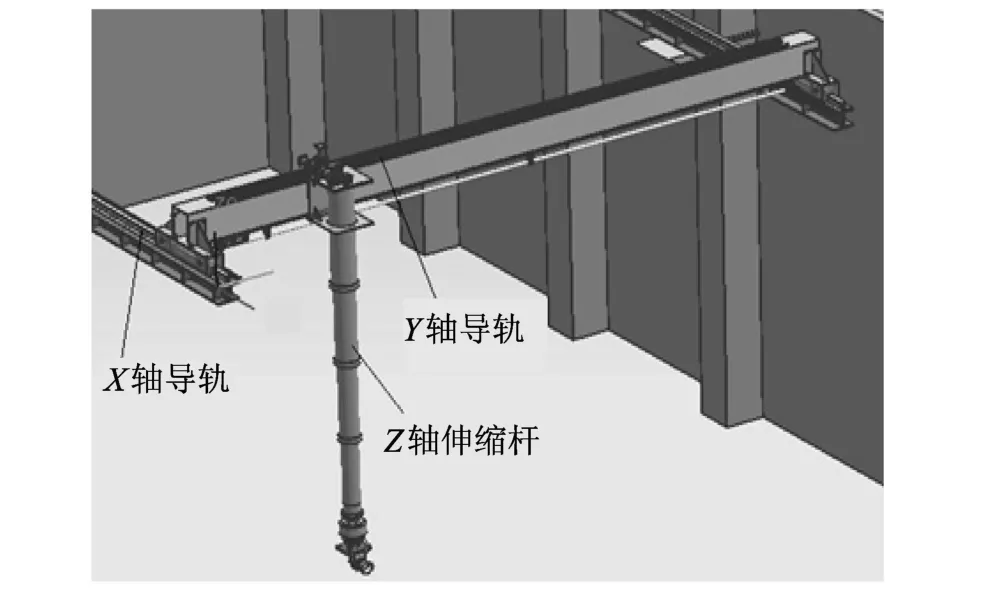
图2 导轨结构示意图Fig.2 Structural diagram of the guide rail

图3 轨迹控制原理图Fig.3 Schematic diagram of the trajectory control
考虑到图像类制导弹导引头的姿态运动的精度、运动速度、足够的姿态运动范围以及良好的频率响应特性等要求,在弹道轨迹控制子系统中自行研制与设计了空间 X,Y,Z三维空间弹体质心运动模式.轨迹控制子系统采用基于 PCI总线的高性能四轴步进运动控制卡来实现控制各轴对应步进电机驱动器来驱动三相混合式步进电机(采用脉冲 /方向的差动接法,此接法抗干扰能力很强),依托 X,Y方向的齿条和 Z方向的伸缩杆作为终端执行的导轨,具体控制模拟图像类制导弹导引头在三维空间的各种运动轨迹.为防止丝杆在 X,Y,Z轴方向运动超出系统要求的运动范围,可通过限位开关来控制其运动位移.导轨结构如图 2所示.弹道轨迹控制子系统的研制与设计是集微机处理、控制板、步进电机和被控制设备为一体的嵌入式数控系统,可以模拟图像类制导弹三维空间运动轨迹,并可实现弹体运动轨迹的精确控制,并能有效地提高系统整体精度和效率.制导弹质心运动参数解算和位置控制由制导弹运动系统仿真计算机和运动学、动力学仿真训练系统共同来实现.动力学参数采用 A/D转换后送入仿真计算机中进行动力学和运动学解算,依据制导弹的基本外形参数来构造制导弹的空气动力学模型,由空气动力学模型来确定导弹的实时质心位置和姿态参数,而实时位置的解算通过仿真计算机来完成,将解算得到的结果输出到执行机构,用来控制导弹质心在地球坐标系中的位置,在实验室条件下就是相对地景沙盘的位置(X,Y坐标)变化和 CCD摄像头视场角(Z轴)的变化[8].同时,图像制导弹在自主导航(惯性导航)阶段,弹体的实时位置和速度等可以和设定的导航参数一起在仿真计算机的显示器上以轨迹图的形式显示出来,以便于对比和分析.而在图像制导弹的末制导阶段则可以显示弹目相对位置和参数.其原理如图 3所示.
为实现 X,Y,Z三轴联动,在该子系统采用直线插补方法,分别设置 X,Y,Z三轴的运动距离,则系统可以自动调整各轴的运动速度来完成线性运动,用以模拟图像类制导弹在末制导段的运动轨迹.如图4所示,该系统根据一组图像类制导炮弹导引头运动过程中的真实采集数据,计算并模拟出的弹体运动轨迹——以俯角为θ的直线俯冲.图 5所示为该系统中模拟某图像类制导炮弹在末段攻击装甲目标的实景仿真训练图.

图4 某图像类制导炮弹运动轨迹图Fig.4 Trajectory diagram of a certain image-guided projectile

图5 某图像类制导炮弹攻击坦克图Fig.5 Imag e of a certain image-guided projectile attacking a tank
3.2 图像采集系统
图像采集子系统是由数据采集的探头(包括摄像机)和有线传输组成,采用单片机为核心设计的云台控制器可实现 CCD摄像头六自由度图像数据采集,确保能够采集弹体运动轨迹中不同方位、不同速度的图像数据.图像采集原理如图 6所示.
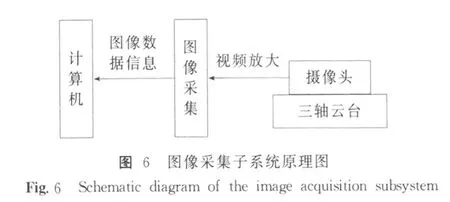
该子系统将变速云台安装在 Z轴伸缩丝杆末端,CCD摄像头固定于云台上,其中任何图像类制导弹的导引头也都可以安装在该平台上,便于检验实装的战术技术指标.通过轨迹控制子系统、变速云台与 CCD摄像头相结合来实现在 X,Y,Z,T(方向),U(俯仰),V(自转)六自由度下采集图像数据.云台可自动和手动设置任意角度的旋转,同时与一体化摄像机连接,不仅可以实现摄像头在运动过程中T,U,V姿态模拟,还可以实现摄像机在各种运动轨迹中采集不同方位和速度的图像数据,摄像头获取的图像通过图像采集卡传输到计算机上并实时显示,计算机通过两个串口与云台连接来实现计算机控制命令及云台反馈数据的传输.
为了使获得的图像可以更加真实地反映出系统固有的噪声特性和比例关系,这里采用统一的三维缩放尺度,保证导弹与目标之间以及目标和背景之间比例关系不变,这样做使得目标处理能力时,所获图像比通过计算机合成目标和地景的图像更加真实可靠.同时,还可以通过调整成像镜头的光圈以及快门、环境光的亮度和调整图像的信噪比,来模拟实现不同图像类制导武器系统的图像信噪比.
3.3 变幻沙盘与沙盘控制系统
国内外寻的制导仿真系统的研究情况表明:目标、环境和抗干扰特性的生成技术是这类仿真系统中耗资最大、技术最难的部分,因而也是这类仿真系统的关键技术[13].
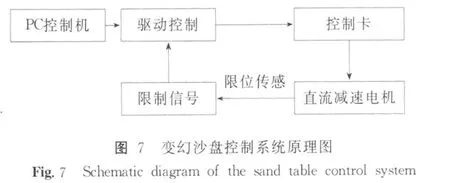
目标仿真变幻沙盘与沙盘控制系统是用微缩版的三维地形和各种军事目标取代计算机模拟出来的虚拟场景与战场环境,显得更逼近真实战场情况可以取得良好的效果.变幻沙盘是按一定比例制作而成的拼装式模型,共有4块双面沙盘构成总体的目标仿真沙盘模型,可以变换出16种不同的组合沙盘场景地形模型.其中,每一个小块沙盘模型都能够接受沙盘控制系统的控制,由计算机发出相应的操作指令控制各拼块进行沙盘模型的变换,来实现在实验室条件下尽可能提供多种不同目标仿真地形地貌场景.变幻沙盘中心部分的每个方块都由 3个电机来控制,分别控制方块的向上、向下及翻转运动.这 3种运动方式的结合实现了沙盘方块的运动来达到变换沙盘目标场景.另外,在变幻沙盘中还安装有限位开关,分别限制每个方块在上、下和旋转方向的位移量,用以保护沙盘防止在操作过程中沙盘被损坏.地形地貌的改变是通过各个沙盘方块的不同替换实现的.在沙盘方块替换过程中,第一个直流电机驱动活动沙盘方块向上运动,当升到一定的高度后,第二个直流减速电机驱动支撑平台进行旋转,最后电机将沙盘方块送回原来的高度位置,这样就实现了一个方块的变换,如此类推.变幻沙盘控制系统是由机械执行机构、导轨、数控电机、位置传感器、驱动电路、通信模块和控制计算机组成.变幻沙盘控制系统如图 7所示.
通过对沙盘方块的变换可以改变地形地貌,以满足模拟不同战场环境的要求.该系统的变幻沙盘可以变换出 16种不同组合的地形,这些地形都是依照实际地形按照实际比例进行缩小,具有很高的立体感和真实性.同时,也可以在这些沙盘三维地形上面放置各种军事目标,如坦克、车辆、飞机等,还可根据需要来直接添加其它军事打击目标.地景图像的季节变换以及气象状态的模拟可以通过改变环境光颜色来实现.根据颜色叠加原理,在彩色的仿真沙盘上通过不同区域的不同颜色光照来再现季节对环境的影响,通过烟雾产生装置来模拟和检验烟雾环境下的图像制导系统抗干扰能力[14].
3.4 系统工作软件和接口技术
图像制导弹仿真训练系统的工作软件都是基于 Windows NT平台,程序采用 Visual C++6.0编写.系统开发的仿真对象软件有制导弹弹体运动学与动力学模型、信息处理与显示、目标图像的识别与跟踪、多种制导规律、图像信息采集与传输、光学成像系统参数设定与调整以及系统主控等多个仿真软件的编制.在软件开发上以面向仿真训练对象为主,以各个功能模块为对象,根据仿真训练对象的属性和特征来确定软件的结构和检测调试界面,使得各个仿真对象之间的数据传输得到大幅度的消减.
该系统还采用高速 A/D转换采集卡、光电隔离型 I/O采集卡和 ARINC429总线接口卡和对象封装技术,保证了系统接口的可靠性和抗干扰性,满足了系统数据传输速度和对精度的要求.
4 结 论
本文设计与研制出的“图像制导弹仿真训练系统”运用多种先进技术,在经过武器系统设计人员对仿真训练系统的使用验证和校核,实践表明该系统具有高的可靠性、良好的可重复性和可操作性,成功地实现了图像制导弹武器系统主要操作训练功能,并能节约巨大经费开支和用于作战能力的评估分析.
图像制导弹仿真训练系统的研制与应用,可以为部队的科技练兵提供一种新的高科技手段,有利于提高图像制导弹武器系统操作人员的素质和整体作战效能,该系统必将在以后的军事教学、科研开发、改装训练以及装备完善等诸多方面发挥越来越重要的作用.
[1]刘兴堂.精确制导、控制与仿真技术[M].北京:国防工业出版社,2006.
[2]于晓洲,计佳俊,李伟,等.远程分布式图像制导仿真实验系统[J].计算机仿真,2010,27(1):36-39.Yu Xizozhou,Ji Jiajun,Li Wei,et al.A long-distance distributional image guidance simulation experiment system[J].Computer Simulation,2010,27(1):36-39.(in Chinese)
[3]宋斌,袁望久,谭红力,等.制导武器半实物仿真的可视化系统设计[J].计算机仿真,2007,24(6):187-190.Song Bin,Yuan Wangjiu,Tan Hongli,et al.Design of visualization system for hardwave-in-the-loop simulation of guided weapon[J].Computer Simulation,2007,24(6):187-190.(in Chinese)
[4]耿东平,王正平,郝磊.导弹制导控制系统半实物仿真系统的设计与实现[J].飞行力学,2008,26(5):75-77.Geng Dongping,Wang Zhengping,Hao Lei.Design and implementation of hardwave-in-the-loop simulation system for missile control and guidance system[J].Flight Dynamics,2008,26(5):75-77.(in Chinese)
[5]娄树理,周晓东.成像型精确制导系统仿真技术研究[J].现代防御技术,2007,35(5):76-80.Lou Shuli,Zhou Xiaodong.Study of simulation technology for imaging precise guidance weapon[J].Modern Defence Technology,2007,35(5):76-80.(in Chinese)
[6]刘志国,刘太阳,王仕成,等.基于实时网络的半实物仿真集成平台研究[J].系统仿真学报,2007,19(15):3425-3427.Liu Zhiguo,Liu Taiyang,Wang Shicheng,et al.Research on hardwave-in-the-loop simulation integrated platform based on real-time network[J].Journal of System Simulation,2007,19(15):3425-3427.(in Chinese)
[7]张刚,刘兴堂,刘力.成像制导半实物仿真系统设计研究 [J].现代防御技术,2006,34(6):111-114.Zhang Gang,Liu Xingtang,Liu Li.Research on imaging guidance semi-physical simulation system design[J].Modern Defence Technology,2006,34(6):111-114.(in Chinese)
[8]东瑞,董国才,沈猛.红外成像制导半实物仿真系统研究 [J].系统仿真学报,2008,20(8):2027-2029.Dong Rui,Dong Guocai,Shen Meng.Research of infraredimaging guidance HWIL simulation system[J].Journal of System Simulation,2008,20(8):2027-2029.(in Chinese)
[9]谷峰,申铉国,白英奎.图像捕控指令制导半实物仿真系统 [J].计算机仿真,2005,22(8):16-18.Gu Feng,Shen Xuanguo,Bai Yingkui.Hardware in the loop simulation system for image catching and commang guidance[J].Computer Simulation,2005,22(8):16-18.(in Chinese)
[10]谷峰.图像匹配技术及图像捕控指令制导半实物仿真系统研究[D].长春:吉林大学,2006.
[11]刘泽乾.电视制导导弹武器系统精确打击仿真研究及应用[D].长春:中国科学院长春光学精密机械与物理研究所,2006.
[12]钱杏芳.导弹飞行力学[M].北京:北京理工大学出版社,2008.
[13]何江华.计算机仿真导论[M].北京:科学出版社,2001.
[14]郭奇胜.战场环境仿真[M].北京:国防工业出版社,2005.
