高速铁路轨道基准网数据采集程序研究与开发
2011-09-03杨友涛孔延花
杨友涛,孔延花
(西南交通大学,成都 610031)
1 概述
在高速铁路精密工程测量方面,CRTSⅡ型板式无砟轨道系统与其他轨道系统的重要区别之一,是在轨道控制网(CPⅢ)下面多布设了一级控制网。目前,我国称之为轨道基准网(Track Reference Network简称TRN)。在CRTSⅡ型无砟轨道板施工过程中,轨道基准网主要作为轨道板精调施工测量控制的基准,而轨道的精调则仍是以CPⅢ控制网作为其测量控制的基准。
轨道基准网的控制点布设于混凝土底座或支承层上,位于轨道板横接缝的中央、相应里程中心点的法线上,偏离轨道中线0.10 m。曲线地段,应置于轨道中线内侧;直线地段应置于线路中线同一侧。测量精度要求其平面网相邻点位的相对中误差小于0.2 mm,高程网相邻点位的高差中误差小于0.1 mm,精度要求极高[1]。轨道基准网的上一级测量基准是轨道控制网(CPⅢ)[1];轨道基准网是三维网,其平面网是采用智能型全站仪自由测站极坐标测量的方法获得各控制点的站心坐标,相邻自由测站之间搭接一定数量的控制点,再采用坐标转换的方法把各控制点的站心坐标转换到线路坐标系统中,由此获得各控制点的施工坐标。因此轨道基准网之平面网,实质上是自由测站极坐标散点网。其高程网,是采用电子水准仪和1把水准尺按中视高差测量的方法,测量CPⅢ控制点到轨道基准网控制点(简写为TRN点)之间的高差和相邻TRN点之间的高差,水准路线在两个CPⅢ点间形成附合水准路线;相邻水准路线之间搭接一定数量的TRN点。因此轨道基准网之高程网,实质上仍是水准网。
由于轨道基准网平面测量的工作量大、精度要求高,同时联测的CPⅢ控制网点的坐标是已知的,因此应开发轨道基准网数据采集程序,控制智能型全站仪对CPⅢ点进行自动测量,对TRN点进行半自动测量。所谓的半自动测量指的是在第一次对TRN测量时是人工大致照准目标、仪器自动测量,而后续的多次测量是仪器自动照准并人工决定是否测量。文章基于天宝智能型全站仪,介绍高速铁路轨道基准网数据采集程序的设计原理、实现方法及其主要功能。
2 轨道基准网平面数据测量方法
轨道基准网控制点平面坐标测量的外业观测,是采用全站仪自由设站极坐标法分别对CPⅢ点和TRN点进行坐标测量。线路左、右线TRN点的测量,应分别架设仪器进行观测。同时全站仪设站点应尽量靠近TRN点的连线方向,且位于所观测的CPⅢ控制点的中间。而且,同一测站观测的CPⅢ点不应少于4对,观测的TRN点宜为10~14个(可视天气情况作相应调整),其中包括与上一个测站搭接的TRN点。
在进行正式测量前,应通过本测站的4对CPⅢ控制点进行自由设站,其精度应满足X、Y、H方向的误差≤0.7 mm,仪器定向精度≤2″。自由设站测量完成和精度满足要求后,应检测CPⅢ控制点的坐标不符值,其坐标不符值限差在X、Y、H方向应≤2.0 mm。若检测CPⅢ控制点坐标不符值不满足上述限差要求,在保证CPⅢ控制点数量不少于6个的情况下,应将超限点剔除后再重新进行自由设站平差计算。在自由设站精度和检测CPⅢ点满足要求后,方可继续进行TRN点的平面测量工作[1]。
同一测站的CPⅢ点和TRN点测量,采用全站仪正镜位半测回的多次观测,TRN点采用一个精密基座依次挪动进行人工观测。具体观测顺序为:
(1)自由设站观测和测站坐标平差计算;
(2)按顺时针观测本站选择的4对CPⅢ点;
(3)由远及近观测所有本测站TRN点;
(4)按顺序继续观测CPⅢ点、TRN点、CPⅢ点、TRN点、CPⅢ点。TRN点的观测应不少于3个半测回,CPⅢ点的观测应不少于4半测回。
其测量精度应满足下列要求[1]:①基准点各半测回测量的坐标值与其平均值间的较差≤0.4 mm。②重迭区内基准点的平面位置允许偏差:横向≤0.3 mm,纵向≤0.4 mm。
每一测站重复观测上一测站的CPⅢ控制点不应少于2对;重复观测上一测站观测的TRN点不应少于3~5个,前后两测站重复观测的TRN点的坐标较差应小于0.3×(n-1)mm,其中n为搭接点个数。以左线测量为例,轨道基准网平面测量的方法如图1所示。

图1 轨道基准网平面测量方法示意(左线)
3 轨道基准网数据采集程序设计
3.1 天宝TSM概况
Trimble Survey Manager(简称TSM)是 Trimble(天宝)测量产品的应用程序,支持基于Trimble智能型全站仪和 GPS接收机等测量仪器的软件操作[2]。Trimble Survey Manager Server(简写TSMserver)是其开发接口,授权用户可以通过这个接口实现软件功能的扩展,开发第三方软件控制天宝智能型全站仪和GPS接收机进行测量。
TSMserver接口的开发具有以下特点[2]:(1)标准的ATL COM SERVER,便于第三方软件的调用;(2)可运行在Win32和Windows Mobile/Pocket PC/WinCE两种操作平台上;(3)通过 TSMserver接口可以接受Trimble测量仪器的数据,并可以控制仪器的运作。
3.2 TSMserver开发技术要求
以下是进行 TSMServer开发所必须的软、硬件条件[2]:
(1)Trimble TSM Tablet软件(用于Win32应用)或者Trimble TSM Field软件(用于Windows Mobile应用);
(2)Trimble TSMServer许可协议号码;
(3)Trimble测量仪器,如S系列、VX、56系列等;
(4)Trimble测量手簿设备,如TCU、TSC2等。
3.3 TSMserver开发程序的基本流程
(1)载入TSMserver类库
TSMserver类库采用的是COM SERVER,因此在使用类库之前,必须首先注册类库。在 Win32下,可以使用命令行的方式或者安装包编程的方式。一般打包程序都包含动态库注册方式,在Win32平台上,类库的所有文件可以置于系统的任意位置。在WINCE平台下,注册的类库为TSMServer.dll,要求类库的所有文件和开发的应用程序在相同的目录。
(2)配置
在类库的根文件夹下面,需要以下3个配置文件。
①TSM.xml文件,用于配置授权和语言。如果在类库文件夹下面没有此文件,则自行创建。
②DEVICE.ini文件,用于配置设备管理器中的设备以及选项。此文件也可以使用设备管理器指令进行配置。
③DRIVER.ini文件,用于配置设备管理器中的设备驱动。
(3)声明TSMserver变量并初始化实例
(4)启动设备管理器并输入授权码
启动设备的函数为ISurveyToolsServer.GetDevice-Manager();输入授权码函数为IDevice Manager.Set(String app,String passwd),其中输入参数app和passwd分别为授权的用户名和注册码。
(5)载入设备
TSMserver通过设备管理器,可以获得设备访问接口,来连接仪器。其函数为 IDeviceManager.Load Device(int DeviceNumber),其中输入参数 Device Number为设备配置文件DEVICE.ini中的仪器编号。
(6)连接设备
连接全站仪的函数为IGeneric Device.Connect()或IGenericDevice.Connect2()。
(7)测量
直接调用ITotal Station接口的函数就可以操纵仪器进行测量。其常用函数如下。
①将望远镜转向指定位置,函数为ITotalStation.TurnTo ( double Horizontal Angle,double Vertical Angle)和ITotal Station. Turn To With Auto Focus (double Horizontal Angle,double Vertical Angle,double Slope Distance) ,其中输入参数Horizontal Angle 为望远镜的转向的水平方向值,Vertical Angle 为望远镜的转向的天顶方向值,Slope Distance 为仪器和目标点的已知距离。利用Turn To With Auto Focus 函数仪器转向目标后自动调整望远镜的焦距。
②搜索目标,函数为ITotal Station. Search ( int TargetId,),其中输入参数Target Id 为搜索棱镜编号。当其等于0 时,棱镜不区分编号。
③测量角度和距离,主要包括以下3 个函数: a)ITotal Station. MeasureAngles And Distance 获取当前目标方向的水平方向、天顶距和距离观测值; b )ITotal Station. Measure Finelock 在Finelock 锁定目标模式下测量水平方向、天顶距和距离; c) ITotalStation.MeasureAutolockTarget 在Autolock 锁定目标模式下测量水平方向、天顶距和距离。
(8)接收数据
TSM Server通过注册事件到当前主程序的方式,以绑定TSMserver COM控件与应用程序的事件,使从仪器返回的消息和数据可以被接收。
3.4 程序的业务流程
根据上文中轨道基准网测量的基本原理,以及测量精度要求,笔者设计、开发了轨道基准网数据采集程序。程序设计的目标是通过软件控制智能型全站仪完成轨道基准网的数据采集自动测量工作,提高工作效率。该软件是基于个人掌上电脑(PDA)硬件环境上开发的,PDA通过线缆、电台或者蓝牙等通信设备与全站仪相连,从而使软件控制仪器进行自动测量。
软件开发平台为Visual Studio2005及Net Compact Framework框架,Visual Basic程序语言提供多种PDA开发模板[8]。开发语言的Net Compact Framework框架有多种控件及向量和矩阵运算可以应用在PDA上,编写的数据采集程序操作简单,界面友好,容错功能较强。
程序的业务流程主要包括以下几个模块:①仪器配置模块,主要实现TSMserver的载入及初始化,使硬件设备PDA与全站仪相连接;②自由设站模块,包括自由设站自动观测、三维平差计算、设站精度评定和CPⅢ点检查[4,5];③测量模块,包括 CPⅢ控制点自动测量与 TRN点的人工参与的半自动测量。由于CPⅢ控制点和TRN点测量是交叉进行的,测量模块是数据采集程序实现的难点。数据采集程序的业务流程如图2所示。
3.5 程序实现的关键技术
(1)仪器控制指令
利用天宝智能型全站仪二次开发接口TSMserver,通过配置PDA的通讯设备,发送指令来控制仪器进行自动照准、精确测量,这是程序操作仪器,实现自动测量的基础。
(2)多线程技术
多线程技术能实现同一程序实现多任务的功能[8],自动测量阶段利用多线程技术实现测量数据的实时更新及测量过程中暂停功能。在自动测量开始后,系统主线程自动建立一个新线程,所有的测量任务都在新建线程内完成。每个目标点的数据观测完成,通过新线程与主线程的数据交换,实现观测数据在测量界面中Data Grid控件的实时显示、更新。同时,利用多线程技术实现自动测量过程中仪器测量的暂停与继续功能。
(3)自由设站三维整体平差
在测站检查功能中,自由设站计算采用三维整体平差方法,把全站仪原始观测数据作为观测量开列误差方程。在天顶距观测方程中加入大气折光作为未知参数进行整体平差计算,在后面TRN点测量时,加入大气折光改正来计算TRN点高程方向的坐标值,理论上更严密[3,4]。
4 数据采集程序的基本功能
4.1 仪器配置
程序实现了PDA与不同的天宝智能型全站仪进行通讯的功能,通过PDA可以控制全站仪进行自动测量,同时全站仪测量的数据也可传回PDA进行分析计算和存储。首先载入TSMserver类库,启动设备管理器,然后配置PDA上的电台或蓝牙等通信设备,连接仪器。其后,在PDA上显示仪器的电子气泡,调整脚螺旋使仪器至水平状态;同时输入气象参数保存在仪器里,便于后面测量时对距离进行气象改正。
4.2 数据质量检查
采集软件可按不同的测量精度要求灵活设置限差,并在测量过程中实时检查同一目标点不同次数间的坐标较差是否超过设置的限差。超限后,程序自动弹出超限窗口,提示操作者是否进行重测。其限差参数设置主要包括X、Y、Z(H)3方向不同测回间坐标较差的限差。
4.3 自由设站检查
在CPⅢ点和TRN点测量前,软件首先对该测站选择的CPⅢ点进行正镜半盘位自动观测,软件该功能测量界面如图3所示,之后进行自由设站,根据自由设站的平差计算精度,检查参与自由设站的CPⅢ控制点的稳定性[5]。剔除不稳定的CPⅢ控制点后,再进行后面的测量工作。
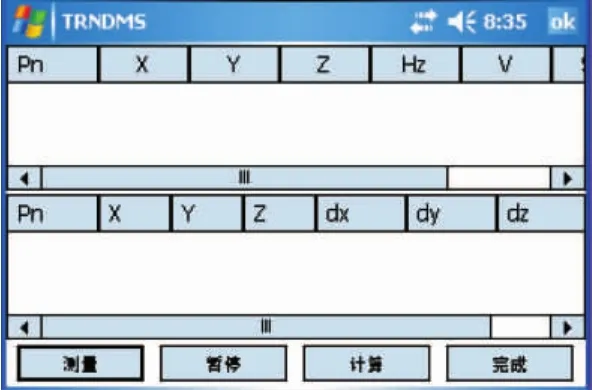
图3 自由设站界面
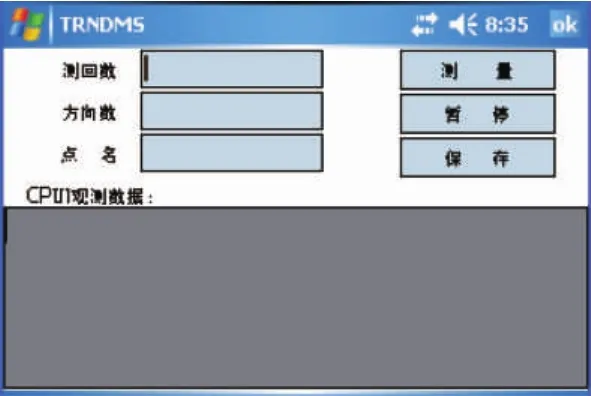
图4 自动测量界面
4.4 自动测量和人工测量相结合
完成CPⅢ目标点选择、自由设站和CPⅢ点稳定性检查后,进入如图4所示的CPⅢ控制点自动测量界面。程序根据自由设站的测站坐标和导入的CPⅢ点坐标数据,自动转向目标点,并对其进行自动照准、测量,观测过程中实时检查坐标较差是否超限。正镜半盘位的CPⅢ点自动测量完成后,进入轨道基准点的人工半自动测量界面,第一次测量需人工大致瞄准TRN点,程序控制仪器精确照准、自动测量。后续测量时,只需选择欲测量的TRN点点号,程序控制仪器自动转向目标点位置进行精确照准,并人工决定是否测量。
4.5 多种成果输出形式
所研发的数据采集软件输出成果比较完善,包括多种不同的格式文件,主要包括:(1)自定义的坐标输出文件,与中铁咨询和西南交大联合开发的“轨道基准网数据平差软件”可实现内外业一体化的数据处理;(2)输出的GSI格式坐标文件,与国外轨道基准网平差软件实现无缝衔接;(3)输出全站仪原始观测数据文件。
5 结论
(1)掌上电脑设备与智能型全站仪相连,通过程序发送、接受指令,控制全站仪进行轨道基准网数据自动采集,解决了高速铁路轨道基准网平面数据采集中测量任务繁重、观测精度要求高等问题,提高了野外测量工作的效率和质量。
(2)轨道基准网数据采集程序与数据平差程序无缝衔接,推动了数据采集和处理的自动化、数字化和高效化,促进了测量内、外业一体化的进一步发展,具有重要的实际意义。
(3)本文研发的轨道基准网数据采集程序已通过铁道部组织的评审,认为该程序总体水平高、技术路线先进、实用性强,具有较好的使用价值。
(4)本文研究开发的轨道基准网数据采集程序已在沪宁城际铁路等工程中推广应用,具有明显的经济效益。
(5)国外的轨道基准网数据采集是全人工测量,测量效率低、自动化程度差,本文研发的轨道基准网数据采集程序填补了国内外的空白,因此具有较大的社会效益。
[1]中铁二院工程集团有限责任公司.TB10601—2009高速铁路工程测量规范[S].北京:中国铁道出版社,2009.
[2]Trimble Navigation Limited.基于 Trimble Survey Manager Server接口进行应用程序开发用户指南[Z].2010.
[3]杨友涛,孔延花,孔书祥.高速铁路轨检仪绝对测量方法应用研究[J].铁道建筑,2010(12):97-99.
[4]张忠良,杨友涛,刘成龙.轨道精调中后方交会点三维严密平差方法研究[J].铁道工程学报,2008(5):33-36.
[5]徐小左,刘成龙,杨友涛.无砟轨道精调中CPⅢ网点稳定性检测方法的研究[J].铁道工程学报,2008(9):21-25.
[6]周东卫.应用智能型全站仪与PDA掌上电脑实现CPⅢ数据自动化采集[J].铁道勘察,2008(6):21-24.
[7]付建斌,刘成龙,卢建康.基于自由设站的高速铁路CPⅢ高程控制网建网方法研究[J].铁道工程学报,2010(11):32-37.
[8](美)依夫杰,霍特卡,赫利斯,等著,杨浩,吴雷,译.Visual Basic 2005高级编程[M].北京:清华大学出版社,2006.
[9]陈兴,范叹奇.高速铁路CRTSⅡ型轨道板几何尺寸检测技术及方法[J].铁道勘察,2010(2):8-9.
[10]梅文胜,郑勇波,周命端.基于PDA的测量机器人自动化网观测软件研究[J].测绘信息与工程.2008(5):45-46.
[11]张书华,蒋瑞波.基于测量机器人的隧道变形自动监测系统的设计与实现[J].测绘科学.2009(3):192-194.
