生物芯片反应仪控制系统的设计
2011-08-23蔡锦达何军湘宋韫峥赵国初
蔡锦达,何军湘,宋韫峥,赵国初
CAI Jin-da, HE Jun-xiang, SONG Yun-zheng, ZHAO Guo-chu
(上海理工大学 机械工程学院,上海 200093)
0 引言
生物芯片反应仪是一种用于临床医学的设备,其具有结构简单、重量轻、振动噪声小、振动频率范围大等特点。它集反应、清洗功能于一体,主要完成以下功能:样品的振动反应、反应残留物的清洗、反应效果检测等。
1 反应仪的结构和工作原理
生物芯片反应仪的结构如图1所示。系统主要组成部分有:反应机构和清洗机构。

图1 反应仪装配图
清洗移动采用步进电机带动滚珠丝杆进行传动,可以保证良好的位置精度,而振动反应则采用直流电机带动偏心机构转动的方式来进行往复运动,通过调节电机的速度而调节振动频率。未进入反应箱之前弹簧处于预压状态,使载物台下侧的档块紧贴着支撑架右侧,以保证载物台与支撑架无相对位移,载物台跟随支撑架通过滚珠丝杠将步进电机的转动转化为直线运动;在进入反应箱后,步进电机不再转动,此时载物台的右侧已顶住顶杆,使左侧弹簧的受力状态开始发生变化,当直流电机转动带动凸轮转动时,弹簧从预压状态继续进行压缩,周而复始变化,使载物台发生振动;振动结束后,支撑架通过滚珠丝杆转动离开反应箱,载物台脱离顶杆,弹簧再次回到预压状态,并由步进电机带动芯片进入清洗状态。
2 电气控制系统设计
2.1 控制系统组成及PLC的I/O端口分配
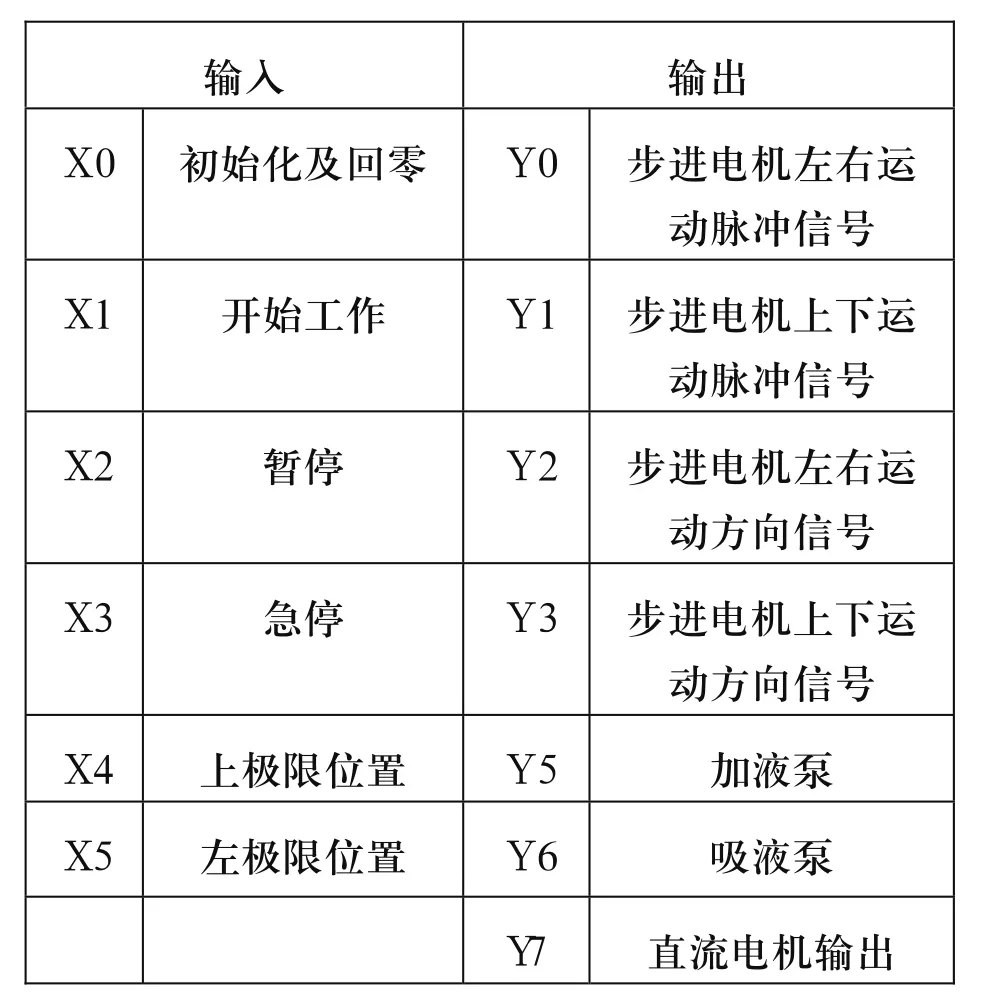
表1 PLC的 I/O分配表
生物芯片反应仪需要人机交互,其控制系统以触摸屏为上位机,以控制核心PLC为下位机,两者之间采用RS-232进行通讯。其执行机构有步进电机和直流电机带动的偏心振动机构等。根据控制要求,选用松下FP0-C32T型PLC,16点直流输入,16点晶体管输出,其I/O端口分配如表1所示。
2.2 反应仪的流程及控制要求
2.2.1 工艺流程
依据设备功能要求,绘制反应仪工作的工艺流程如图2所示。
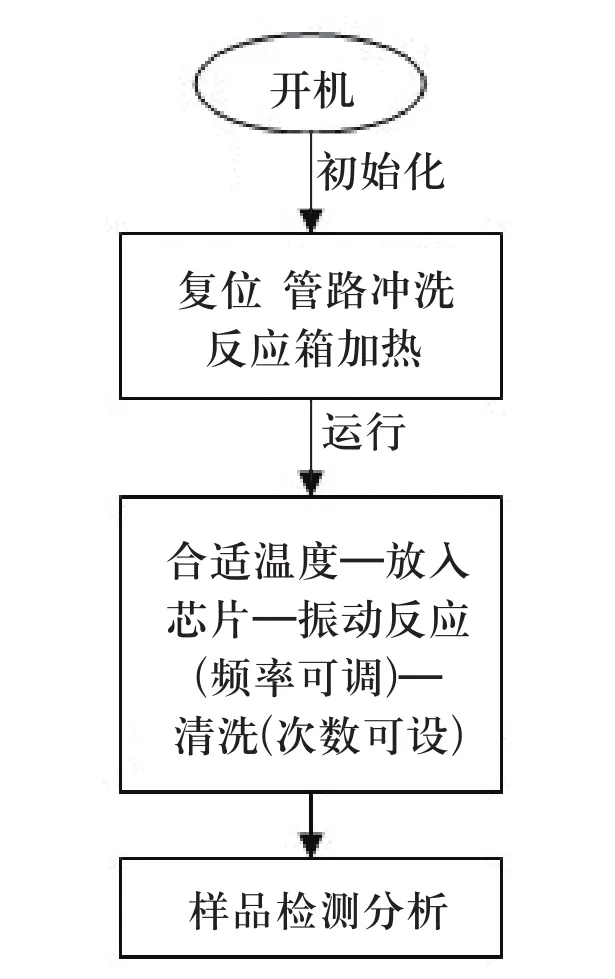
图2 工艺流程图
生物芯片反应仪在开机后先初始化,包括:管路的清洗、反应箱的加热、针头复位回零;初始化后就是蛋白芯片的振动反应及反应后清洗;最后是蛋白芯片信息的检测及存储和信息对比。各种参数在没开始工作前根据生物芯片就已设定好。
2.2.2 控制要求
反应仪自动控制系统中有三个重要组成部分:第一是清洗针头的精确定位,使用步进电机控制。首先选取合适的步进电机的步进角,然后运用细分技术对步进角进行细分,可以使定位精度达到很高的要求。此外,两路清洗针头各自左或右运动是由两个步进电机同步动作实现控制的,其由一路脉冲输出控制;第二是直流电机调速,使用PLC自带的PWM方式进行控制。其具有调速范围宽广,调速特性平滑,及很好的回转特性和输出效率等特点,可以很好的满足反应仪对振动频率的设计要求;第三是反应箱的温度控制,使用温控仪(PID)进行控制。PLC通过RS-485与温控仪进行通讯,设定控制温度并读取当前温度值存储到数据寄存器中,而触摸屏又通过RS-232通讯方式读取和更改PLC的寄存器数值,从而实现了温度的设置、更改和实时监控。
生物芯片反应仪的控制为自动控制,其控制流程如下:开机上电接通X0初始化,加液泵与吸液泵工作冲洗管路(冲洗时间、次数可由触摸屏设定),反应箱进行加热(PID调节),左右针头回到左右零位和上零位;初始化后观察温度达到预先设定的值,放入蛋白芯片,接通X1开始工作,直流电机带动偏心机构振动反应(振动频率、时间可调);反应后,载物台退出反应箱进入清洗状态,步进电机通过脉冲数进行准确定位;最后就是蛋白芯片的信息检测和管理。此外,在控制系统中设有暂停和急停按钮,无论何种状态按下暂停可以使系统暂停运行,再按可继续运行。而按下急停按钮后,整个系统所有设备停止运行,断开电路。截取的部分梯形图如图3所示。
2.3 触摸屏系统管理
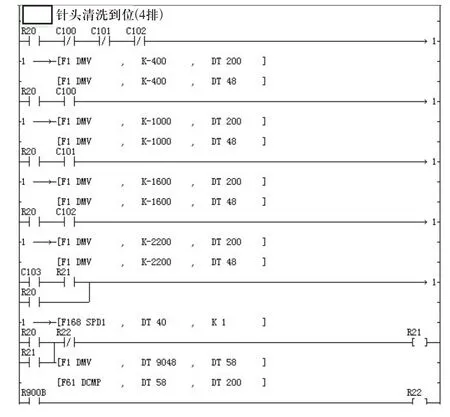
图3 部分程序梯形图
触摸屏作为上位机,需要对系统的参数进行管理和设定,如管路清洗时间、反应时间和温度、针头清洗次数和定位脉冲数等。触摸屏的另一个功能是芯片信息的管理。对反应后的生物芯片进行反应效果检测等,获得样品大量的生物信息,这些信息需要存储在触摸屏内,并且反应仪需要对各种肝炎病毒和肿瘤相关的标志物等进行对比检测,因此它们的信息也要存储到触摸屏中。
3 结束语
该生物芯片反应仪控制系统较复杂,主要体现在反应箱的温度控制、清洗的定位控制、以及与触摸屏连接实现对参数的控制修改等。运用PLC控制其完成各种规定的工序动作,实现了反应仪的自动化,提高了工作效率。该生物芯片反应仪着重解决了蛋白质芯片的高效反应和清洗减少残留物的问题,在整个改进设计和分析探讨过程中注意了环保和安全系统设计理念,对于我国生物芯片技术的临床医学应用和产业化道路发展具有重大意义。
[1]阎凤.生物芯片反应仪的研制[D].上海理工大学,2009.
[2]松下电工中国有限公司.FP用系列编程手册[Z].2004.
[3]松下电工中国有限公司.FP用系列编程手册(补充版)[C].2007.
[4]罗庚兴,宁玉珊.气动安装机械手的PLC控制[J].制造业自动化,2011,1(33):82-84.
[5]李志明,王东,宋立滨,等.生物芯片微阵列分配机器人系统的研制和开发[J].机器人,2002,24(4):329-334.
[6]贾振中,宋立滨,杨东超,陈恳.接触式点样机器人及相关技术研究进展[J].机器人,2007,(02).
