基于RecurDyn的履带车辆动力学仿真
2011-08-21骆清国司东亚龚正波赵新军
骆清国,司东亚,龚正波,赵新军
(1.装甲兵工程学院机械工程系,北京 100072;2.北方发动机研究所,大同 037036)
履带车辆在现代战争中发挥着举足轻重的作用,但因其机械系统复杂,使用环境多变,如果基于传统的经验结合实验的方法对其性能进行研究,通常周期比较长,耗费大.随着虚拟样机技术的发展及多体动力学分析软件的出现,对履带车辆动力学性能的研究,可以通过建立准确的虚拟样机模型,进行多种工况下的虚拟测试来实现,对降低试验成本,缩短研制周期具有重要意义.
1 履带车辆行动部分虚拟样机建模
虚拟样机分析软件RecurDyn,以多体系统动力学理论为基础,采用相对坐标系运动方程理论与完全递归算法,减少了绝对坐标体系中约束方程的数量,适于求解大规模复杂的多体系统动力学问题.其高速履带系统工具包Track/HM,包括了主动轮、诱导轮、负重轮、托带轮、高速履带等各种履带行驶系统组件,可以方便快速地实现对车辆行动部分的精确建模.同时,利用其提供的Ground模块可建立各种道路模型[1-3].
1.1 行动部分零部件几何建模及组装
履带车辆行动部分虚拟样机模型由车体、主动轮、诱导轮、负重轮、托带轮、履带等零部件组成.基于RecurDyn提供的CAD实体建模界面,可方便地建立车体几何模型;履带车辆含有两条履带子系统,每条履带系统包括1个主动轮、1个诱导轮、6个负重轮、3个拖带轮和89块履带板,履带板采用双销式链接;车辆主动轮采用前置方式,主动轮齿数为11.通过调用Track-HM模块,根据车辆的实际情况选择各个子模型的具体结构,确定行动部分各零部件的几何参数、性能参数、安装位置以及连结方式等,完成车辆行动部分零部件实体模型的组装,见图 1[4].

图1 履带车辆车体及行动部分实体模型
1.2 施加约束
设置车辆各零部件之间的约束:结构约束(接触约束)、力约束、运动约束及刚体碰撞约束等.使行动部分各零部件与车体连接可靠、正确.
施加的主要约束包括:①主动轮、诱导轮、托带轮、平衡肘同车体之间以及负重轮与平衡肘之间的旋转约束;②平衡轴和车体之间施加力约束,施加力约束时定义初始力或转矩;③在车体和主动轮的结构约束上定义一个运动约束,以驱动车辆行驶;④车辆与地面之间的碰撞约束,该约束由软件自动完成,只需定义履带与路面之间的接触参数.
1.3 道路模型
虚拟测试采用的是二维平坦型道路,设定接触路面为非沉陷刚性路面,直接在RecurDyn的Ground模块下建立,用来近似模拟履带车辆实车道路实验的水泥混凝土道路,地面参数在履带系统中定义,每条履带系统可单独定义路面和履带路面间的接触参数[5].根据需要也可设为软路面,若为软路面则需要根据M.G.Bekker的地面力学理论[6]设定沉陷参数.
2 仿真与分析
运动仿真过程分为3个阶段.
2.1 静平衡阶段
静平衡阶段表示仿真开始后履带车辆在重力作用下,缓慢进入静平衡状态的过程.静平衡位置分析可用于验证模型的有效性,检验模型的约束条件、初始条件等.
静平衡阶段将整个虚拟样机模型的运动约束设置为零,让整车模型在自身重力作用下自然落到水平地面上.图2为整车车体质心垂向静止位置变化曲线,可见车体质心垂向静止位置在前期发生上下振动,约在3 s后不再变化.
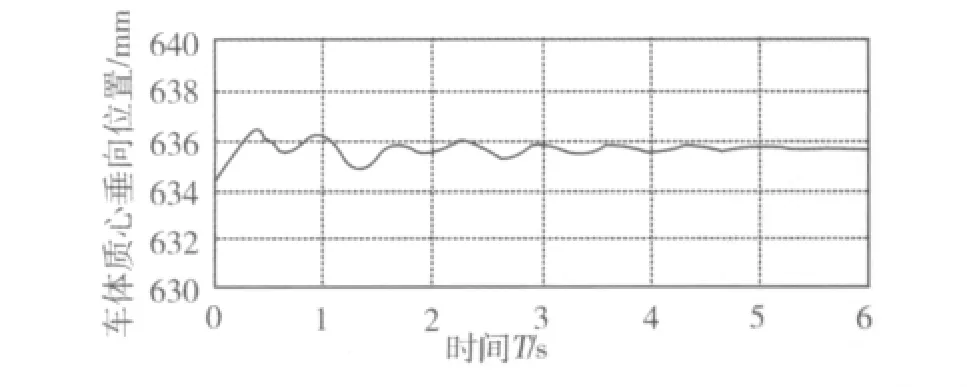
图2 车体质心垂向位置
2.2 加速阶段
车辆由静平衡状态开始加速,并加速到目标速度,仿真实验目标速度V0设定为3.424 km/h.采用STEP函数定义运动约束,由于此运动约束需施加在主动轮旋转副上,所以,需要将目标车速换算成主动轮的角速度,大小为3.621 rad/s.函数式为:STEP(TIME,3,0,8,3.621).
其意义为:在前3 s内,主动轮转速为0,车辆在重力作用下落到水平路面上并达到静平衡;在3-8 s内,车辆开始加速,主动轮转速由0加速至3.621 rad/s,然后开始匀速行驶.图3为在两侧主动轮旋转副上实际施加的运动约束,由于施加的运动约束相同,两条曲线完全重合.图4为仿真得到的车体速度曲线.

图3 两侧主动轮旋转副上施加的运动约束

图4 车体速度响应
可见,车辆匀速行驶时的速度为0.954 m/s(约3.433 km/h),与目标速度V0很接近,说明经过换算施加在主动轮旋转副上的运动约束是准确的.
2.3 匀速行驶阶段
车辆完成加速阶段,达到目标行驶速度后以稳定车速匀速行驶.匀速行驶阶段,左右两侧侧减速器被动轴上测点转矩时域波形如图5所示.
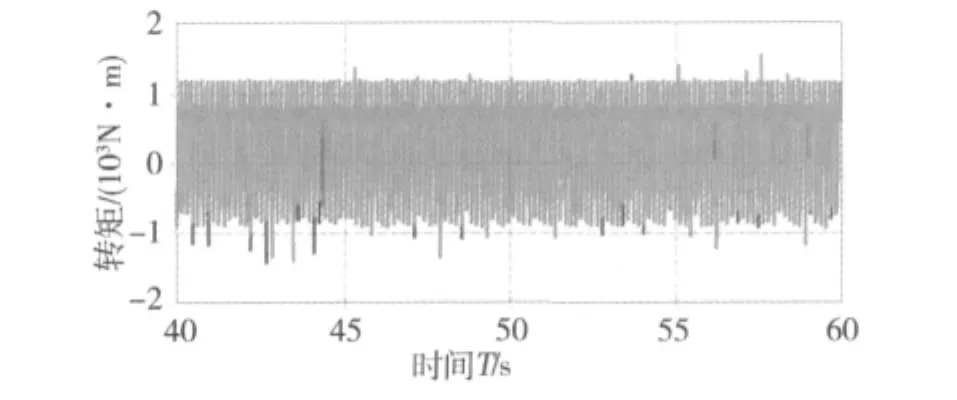
图5 转矩时域波形图
可见,仿真结果比较理想,两侧转矩响应曲线几乎是吻合的.图中转矩的波动主要由履带和主动轮轮齿的啮合造成,且由于仿真模型中,主动轮与履带销之间是刚性连接,导致仿真输出的转矩幅值比实测结果要大很多,在平均转矩较小时,会出现转矩为负的情况.计算得到左右两侧的平均转矩分别为318.070 N·m、318.894 N·m.
图6为实车道路实验获得的匀速行驶阶段右侧侧减速器被动轴上测点转矩时域波形,统计分析得到其平均转矩大小约为317.169 N·m,与仿真结果十分接近,可以认为仿真结果是准确的.
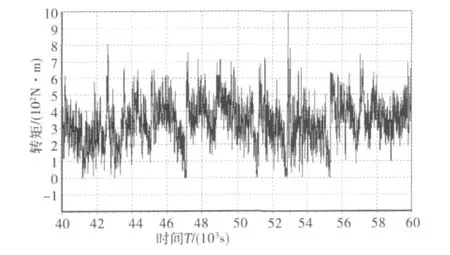
图6 实测的转矩时域波形图
为了进一步验证仿真模型的正确性,利用该模型进行不同速度工况下的虚拟测试,得到相应的转矩变化情况,并与相同工况下的实车道路试验结果进行对比分析.表1中给出了实车道路试验采用的车速大小,在进行仿真时需将该速度转化为施加在主动轮旋转副上的角速度.

表1 速度工况
图7中横坐标给出了施加在主动轮旋转副上的3种不同速度约束,纵坐标给出了实车试验与虚拟测试分别得到的平均转矩大小.由图7可以看出,虚拟测试结果与实车道路试验所测得的转矩结果比较接近,而且,不同速度工况下转矩变化不大,与实际情况相符.这主要是因为匀速阶段转矩的大小由车辆与地面之间的摩擦力决定,而车辆所受摩擦力主要由车体重量及履带与地面之间接触的摩擦阻力系数决定,故转矩基本保持不变.

图7 不同速度工况下转矩变化
3 结论
1)将虚拟样机技术运用于高速履带车辆动力学特性的研究,通过建立履带车辆行动部分多体动力学虚拟样机模型,进行虚拟仿真实验,可以极大地节约时间和成本.
2)将履带车辆仿真模型的计算结果,与同工况下行驶实验的测试结果结合起来,验证了仿真模型的正确性,也说明应用多体动力学仿真分析软件RecurDyn可以对履带车辆动力学性能作高效、精确的仿真分析.
[1] 韩宝坤,李晓雷,孙逢春.履带车辆动力学仿真技术的发展与展望[J].兵工学报,2003,24(2):246-249.
[2] 周 涛,魏蒙林,熊全胜 等.基于RecurDyn的多体动力学仿真[J].CAD/CAM与制造业信息化.2004(8):44-45.
[3] 卢进军,魏来生,赵韬硕.基于RecurDyn的滑转对履带车辆加速性能影响研究[J].系统仿真技术,2007,3(3):139-143.
[4] 陈 兵,顾 亮,黄 华.履带车辆半主动悬挂计算机仿真研究[J].计算机工程与技术,2006,27(1):7-11.
[5] 赵玉慧,刘春光,臧克茂.基于Matlab与RecurDyn的电传动履带车辆的联合仿真[J].车辆与动力技术,2007(3):24-27.
[6] 张克健.车辆地面力学[M].北京:国防工业出版社,2002.
