基于滑窗式单帧红外弱小目标检测方法研究
2011-08-10王宇翔韩振铎
王宇翔,韩振铎,黄 义
(1.空军预警学院,武汉430019;2.解放军92261部队,海口570203)
0 引 言
天基预警系统是战略预警系统的重要组成部分,其探测技术主要分为红外探测、可见光探测和雷达探测三种基本手段。由于红外探测具有良好的抗电子干扰、探测隐身目标等能力,同时红外探测器又具备体积小、质量轻、功耗低和适装性好等优点,因此红外探测已成为当前在天基预警系统中运用最广泛的探测手段,例如美国正在研制和开发的天基红外预警系统(SBIRS)。天基红外预警系统的探测采用了双探测器工作模式:高轨卫星上配有扫描型和凝视型两种红外探测器,低轨卫星上配有捕获型和凝视型两种红外探测器。弹道导弹、隐身飞机等威胁目标在进入红外探测器探测范围的初期,往往以弱小目标的形式出现。因此,如何在复杂环境背景中快速有效地检测出红外弱小目标,为拦截武器、火力打击等防御系统提供尽可能多的预警时间,成为天基红外预警系统要面对的关键问题,其研究具有十分重要的军事意义。
本文从红外小目标单帧图像灰度特征入手,构造了一种基于滑窗式的弱小目标检测算法,通过Matlab仿真实验证明了该算法对像素在3×3左右的红外弱小目标具有良好的检测能力。
1 红外弱小目标灰度图像特性分析
本文中所讨论的目标特指复杂环境下的红外弱小目标,由于此类目标与红外传感器距离较远,因此目标比较弱小,本文讨论的目标一般仅占3×3左右的像素,大多表现为点状,这样一来,目标的形状结构信息就已基本丢失。同时弱小目标又处于含有云层、山脉、大气、海面等复杂背景以及各种随机噪声中,整幅图像的信噪比低,具有一定的目标检测难度,下面给出1个实例,如图1所示。
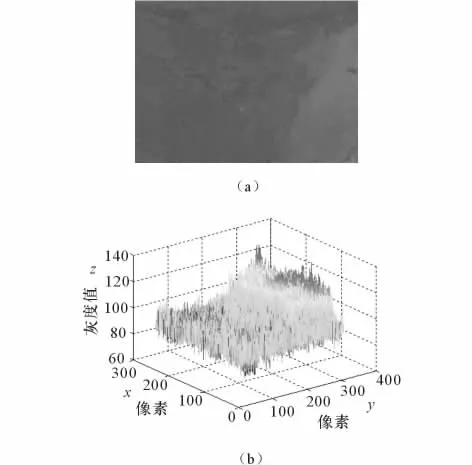
图1 复杂背景环境下的红外弱小目标灰度图
对图1中复杂环境下的红外弱小目标灰度图进行深入分析研究后发现以下特点:(1)目标所占像素少。国际SPIE组织对于小目标的定义为:成像的尺寸小于80个像素(约9×9),即小于一幅256×256图像的0.15%。而本文中所检测的弱小目标小于10像素(3×3),而整幅图像像素为239×309,目标仅占整幅图像的0.012%。(2)背景复杂。图像的右侧有大块的戈壁亮背景,与草地暗背景形成了明显的分界线;在弱小目标的周围还出现了不少的随机噪点。(3)目标的信号微弱,在整幅图中不是最亮。图像中右下方背景局部区域的亮度比目标的亮度还要亮。
以上都是不利于目标检测的特征,但此类图像目标也存在以下有利于检测的特征:(1)在目标周围的局部小范围内,目标具有亮度高的特征;(2)背景是大面积平稳变化的场景,且像素之间具有相关性;(3)目标所占的像素点数相对固定,一般在3×3左右。
2 算法设计
2.1 图像灰度值的数学模型
复杂背景环境下的红外弱小目标图像可以表达为[1]:

式中:(i,j)为图像中像素点坐标;Y(i,j)为红外图像的灰度值;S(i,j)为弱小目标的灰度值;B(i,j)为背景图像的灰度值;N(i,j)为噪声的灰度值。
红外图像中的云杂波等背景起伏是广义平稳的,且近似服从高斯分布[2]。而随机噪点所占的像素比目标所占的像素更小,一般只有1个像素左右。
2.2 算法原理及流程
滑窗式红外弱小目标单帧图像检测的算法主要是依据上述对红外弱小目标灰度图像分析的结果来进行的设计。由于目标所占像素大约为3×3,选择像素略大于目标的滑窗(如9×9的正方形滑窗),当该滑窗中心像素滑至目标时,中心像素的灰度平均值要明显高于外围像素的灰度平均值。通过这两者之差的结果与判决阈值进行比较,就可以判断出该窗口中心位置是否存在目标。当该窗口遍历滑过整幅图像后,就完成了红外弱小目标单帧图像的检测。
对判决阈值的自适应估计,首先对图像进行背景预测,常用的背景预测算法有中值滤波、低通滤波和形态学滤波等,本文采用3阶巴特沃斯低通滤波[3]来估计背景。通过滤波处理后得到背景预测图像,然后对该图像进行同样的滑窗处理,由于背景预测图像中不含目标信息,因此判决阈值应当选择大于背景预测图像中所有滑窗中心灰度均值与外围灰度均值之差的最大值。通过大量的仿真实验,判决阈值t可以选择为:

式中:m为背景预测图像中所有滑窗中心灰度均值与外围灰度均值之差的最大值;σ为背景预测图像中所有滑窗中心灰度均值与外围灰度均值之差的标准差;a为修正系数,a取值小可以提高检测概率,取值大则降低虚警概率,通过大量仿真实验,a取值一般在0.1~3之间比较合适,这里a取经验值1。
具体的滑窗式算法流程示意如图2所示。
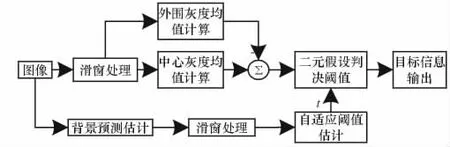
图2 算法流程示意图
关于滑窗的设计,本文重点讨论正方形、八边形两种滑窗设计对目标检测的影响。这两种滑窗的具体设计方法如图3所示。
在图3中,图3(a)为正方形滑窗,标记为1~9的灰色方格为中心像素,标记为10~81的白色方格为外围像素;图3(b)为八边形滑窗,标记为1~9的灰色方格为中心像素,标记为10~57的白色方格为外围像素。
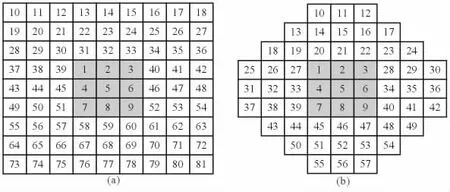
图3 滑窗设计方法的示意图
3 仿真实验
本文采用上述两种滑窗对不同背景下单帧图像中红外弱小目标的检测进行了MATLAB仿真,并与背景预测检测小目标和形态学滤波检测小目标的方法进行了比较,结果如图4所示。其中,图4(a)为原图像;图4(b)为通过3阶巴特沃斯低通滤波器预测背景并对消后的目标检测结果;图4(c)为经过Top-hat算子形态学滤波[4]的检测结果(结构元素选取为直线);图4(d)为本文设计的正方形滑窗处理后的检测结果;图4(e)为本文设计的八边形滑窗处理后的检测结果。
通过上面的仿真实验结果,可以明显发现本文滑窗式算法对目标检测的有效性和优越性。下面引入信噪比增益和背景抑制因子2个参数来具体评估检测效果,2个参数定义如下[5]:
信噪比增益:

式中:s为目标信号强度;σ为图像标准差;下脚in表示输入图像的参数,out表示输出图像的参数。
背景抑制因子:

表1列出了上述各种检测方法的具体参数指标,这些参数反映了各种检测方法在抑制背景和增强目标方面的能力。
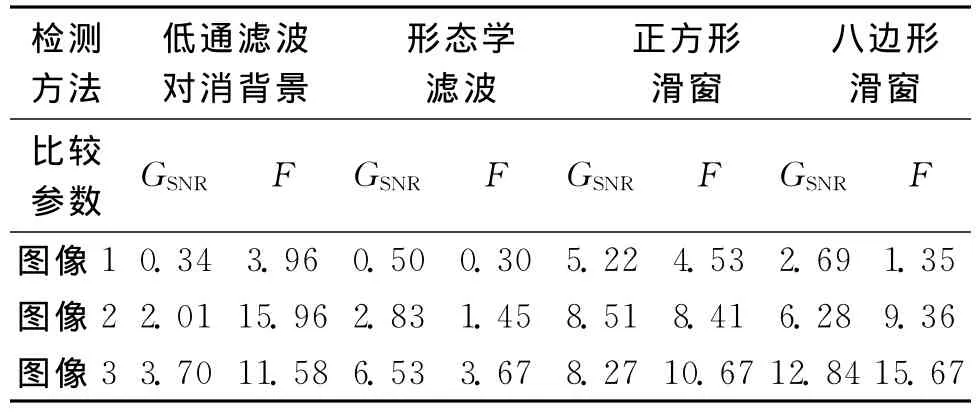
表1 各种检测方法的效果比较
通过对上述检测方法的具体比较可以发现:
(1)低通滤波对消背景的方法背景抑制能力很强,但去噪能力较弱,因此该方法只能作为红外弱小目标检测的预处理。
(2)形态学滤波的方法提高了去噪的能力,但对背景的抑制能力有限。
(3)滑窗式检测方法的去噪能力和背景抑制能力得到了大幅提高,明显优于其他两种方法。
(4)滑窗式检测方法效能的最佳发挥与滑窗的设计有关,且与图像的具体特征也有一定的关系。对于图像1,八边形滑窗检测与正方形滑窗检测相比较,处理结果中虚警点明显增多。
4 结束语

图4 各种检测方法的处理结果
本文针对红外弱小目标单帧图像的特征,提出了一种基于滑窗式的检测算法,同时利用滑窗式的方法提出了一种自适应阈值的估计方法。仿真结果显示,该算法在红外弱小目标的检测中能有效地抑制背景和噪声,并能够较好地检测出弱小的红外目标,达到了预期的效果。在对像素为3×3的弱小目标进行仿真之余,利用该算法对像素在3×3附近的弱小目标图像(2×2、2×3、4×3、4×4等)进行仿真,结果表明本文的算法对上述目标也具备一定的检测能力,说明了该算法具有一定的鲁棒性。
本文的算法还可以在以下几点进一步研究和改进:
(1)由于是基于滑窗外围和中心像素的比较,因此,无法检测出现在整幅图像最外围像素的目标,例如在本文中设计的正方形滑窗,就牺牲了对图像最外围3条像素的目标检测能力;
(2)滑窗的设计形式多样多样,可以通过各种滑窗针对不同图像处理效果的研究,进一步总结归纳出不同滑窗发挥最佳检测效果的具体规律。
[1]李凡,刘上乾,秦翰林.自适应双边滤波红外弱小目标检测方法[J].光子学报,2010,39(6):1129-1131.
[2]熊伟,谢剑薇.光电跟踪控制系统导论[M].北京:国防工业出版社,2009.
[3]王家文.MATLAB7.6图形图像处理[M].北京:国防工业出版社,2009.
[4]康令州,陈福深,王德胜,曾军.基于形态学算法的红外图像小目标检测方法研究[J].光电工程,2010,37(11):26-31.
[5]焦建彬,杨舒,刘峰.基于人工神经网络的红外小目标检测[J].控制工程,2010,17(5):611-613.
