高速铁路轨道基准网平面网构网测量及严密平差方法研究**
2011-08-08陈海军刘成龙付恒友杨雪峰
陈海军,刘成龙,付恒友,杨 峰,杨雪峰
(1.西南交通大学地球科学与环境工程学院,四川 成都 610031;2.沪昆铁路客运专线浙江有限责任公司,浙江 杭州 310018;3.中铁天宝数字工程有限责任公司,四川 成都 610031)
1 概述
高速铁路大多采用无砟轨道技术,CRTSII型板式无砟轨道是我国从德国引进的一种无砟轨道结构形式,已大量应用于我国高速铁路建设中[1]。在高速铁路精密工程测量中,CRTSII型板式无砟轨道与其他无砟轨道的重要区别之一,是在轨道控制网(CPⅢ)下多了一级加密控制网,这一级称为轨道基准网(以下简称为TRN)。TRN的主要作用是为轨道板精调施工测量提供控制基准[2]。TRN是最近几年才引入我国,是一个精度要求极高的三维控制网。德国宣称其平面网相邻轨道基准点(以下简称为TRP)之间的相对点位中误差小于0.2 mm,高程网相邻TRP之间的高差中误差小于0.1 mm。
TRN平面网的测量和数据处理方法跟我国常规的测量方法有很多不同之处:如只进行半测回的测量、所有TRP为散点而并不构成网形、数据处理为坐标转换而不是边角网观测值的严密平差、没有精度评定等。目前我国已基本解决高速铁路中CP0,CPI,CPII和CPIII控制网测量和数据处理方法的问题,而对于TRN的测量和数据处理方法国内尚处于研究和引进阶段,目前还没有指导TRN外业测量和内业数据处理的相关测量规范。考虑CPIII平面网的测量和数据处理方法,提出采用与CPIII平面网类似的构网测量和边角网平差方法,进行TRN的测量和平差计算。
介绍了德国进行TRN平面网测量和数据处理的方法;在此基础上,提出了采用双自由测站对多个TRP进行交会构网测量及其数据处理的新方法,简称构网法;接着采用边角网间接平差的严密精度估算方法,对构网法的相邻TRP的相对点位精度进行了估算;最后采用德国法和构网法分别进行TRN平面网测量和数据处理的仿真实验,并对实验结果进行比较和分析。
2 德国测量和数据处理方法及其优缺点
2.1 德国测量和数据处理方法介绍
TRN平面网的德国测量方法为:采用全站仪自由测站,以极坐标测量的方式采集CPIII控制点和TRP的坐标,并且左、右线分别进行测量和数据处理[3]。现以左线为例,具体测量方法如图1所示。
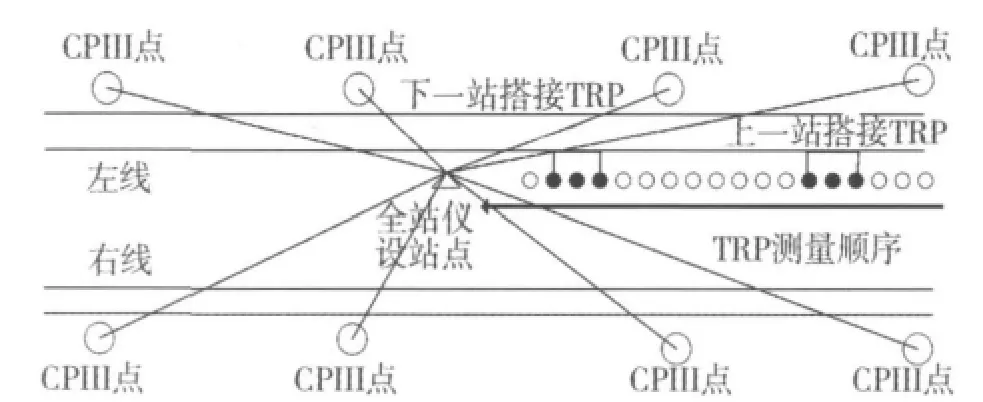
图1 TRN平面网德国测量方法示意图Fig.1 TRN plane network Germany measurement method sketch map
图1所示为左线TRN平面网一个测站TRP坐标测量的方法。TRN平面网的具体观测步骤为:
(1)全站仪靠近各TRP的连线方向,通过最近的4对CPⅢ控制点进行自由设站,通过自由测站的精度和残差检测CPⅢ点的精度;
(2)以极坐标测量的方式,由全站仪正镜位依次测量4对CPⅢ点和本测站欲观测的TRP(宜为11~14个)的坐标,要求TRP的观测应不少于3次,CPⅢ点的观测应不少于4次;
(3)搬站,接着按(1)和(2)的方法进行下一测站的TRP坐标测量,要求和上一测站至少搭接3个TRP;
(4)重复(1),(2)和(3),直到完成本区段TRN平面网的建网测量。
德国对应的数据处理方法为:先站内处理,再站间搭接。即根据CPIII实测站心坐标及其在线路工程独立坐标系中的坐标,按三参数坐标转换模型计算转换参数后,把所有TRP站心坐标转换到线路工程独立坐标系中;然后对相邻测站搭接的TRP的两测站坐标按余弦函数模型进行平滑处理,得到搭接处TRP的最终坐标。
2.2 德国方法的不足
根据前面介绍的TRN平面网的德国测量和数据处理方法,并结合我国的测量习惯和经验,分析以后发现德国的方法存在以下几个方面的不足:
(1)外业测量时,记录各个CPIII点和TRP的坐标,而不是全站仪最原始观测值;没有相应的外业精度控制指标,不能及时发现粗差,无法及时对观测数据的质量进行检查和控制;
(2)除了搭接点,每个TRP只被一个测站观测,没有构成网和多余观测,网的精度和可靠性低;
(3)以坐标转换模型为基础进行近似平差,而不是对直接观测量进行严密的平差,这与我国常规的控制网平差有较大不同;
(4)德国宣称TRN平面网的主要精度指标为相邻TRP间的相对点位中误差,要求小于0.2 mm,却没有给出精度评定方法,能否达到不得而知,也无法知道TRN平面网的真正精度;
(5)左、右线要分开测量;在同一测站测量时,对同一个TRP点也要多次安装专用的精密基座,作业效率低;即使使用专门的采集软件,也只能实现半自动测量。
3 构网法测量及其数据处理原理
鉴于德国方法存在以上种种不足,在TRN平面网的外业观测和数据处理过程中,提出一种类似于CPIII平面网的构网测量方法,即采用双自由测站对多个TRP进行交会构网测量和进行严密网平差的新方法。
3.1 构网法测量及其数据处理方法
如图2所示,构网法的测量,就是自由测站z1~z5位于左、右线中间,每测站观测就近的4对CPⅢ点和左、右线各20个TRP(开始和结束测站为左线和右线各10个TRP),保证每个TRP被2个自由测站的边角交会,相邻自由测站点的间距约为65 m左右。TRP也采用与CPIII点类似的强制对中测量标志和配套专用棱镜。
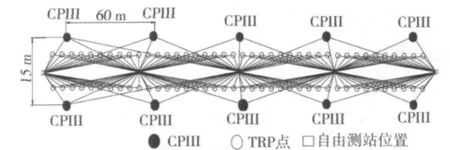
图2 构网法测量示意图Fig.2 Network -constructed method measurement sketch map
结合图2可知,构网法测量具有如下特点:
(1)测量时采用完整的一个测回,而不是半测回的测量方法,可以消除2c、横轴倾斜、竖盘指标差等仪器的系统误差,提高了观测值的测量精度;
(2)测站位于线路的中线,可同时观测左、右线的TRP,单个测站测量的TRP数量大大增加,提高了测量效率;
(3)采集的是自由测站到TRP的方向和距离,可以对外业数据质量进行控制,及时检查和发现观测值中可能出现的粗差;
(4)每个TRP都被2个自由测站边角交会,构网规则,有多余观测,对精度和可靠性有益;
(5)可以按边角网间接平差的方法进行网的严密平差,也能够进行精度评定。
按上述方法构建的TRN平面网,实质上是一个边角交会控制网。因此可以对水平方向和水平距离列立误差方程,按Helmert方差分量估计确定两类观测值的权比关系,然后按照边角网间接平差的方法,进行TRN平面网严密的平差和精度评定[4]。
3.2 构网法的精度估算
为分析构网法所建立的TRN平面网的精度情况,可结合图2所示的实际测量网形,按照边角网间接平差的精度估算方法,对构网法的TRN平面网的相邻点相对点位精度进行了仿真计算。
精度估算的原理为:首先对TRN平面网网中观测值(水平方向、水平距离)开列误差方程,并根据仪器的标称精度按常规定权方法确定观测值的权;然后组成法方程和计算该网未知点坐标的协因数阵;最后根据先验精度和协因数阵,就可以对TRN平面网中的相邻TRP的相对点位精度进行估算[5]。图3所示为估算的网形示意图。

图3 构网法精度估算示意图Fig.3 Network - constructed method precision estimation sketch map
如图3所示,z1和z2为自由测站点,301~308为CPIII点,L01,L02,R01和 R02为 TRP。结合目前高速铁路现场普遍使用的2种高精度全站仪的标称精度:方向中误差±0.5″和距离中误差±(1 mm+1 ppm)/km(TCA2003)、方向中误差 ± 1″和距离±(1 mm+2 ppm)/km(TCRA1201),计算图3中L01,L02,R01和R02点间的相对点位中误差。由于全站仪的测距固定误差对相邻点的相对点位精度影响很小,所以估算时并没有考虑全站仪的测距固定误差。精度估算结果见表1所示。
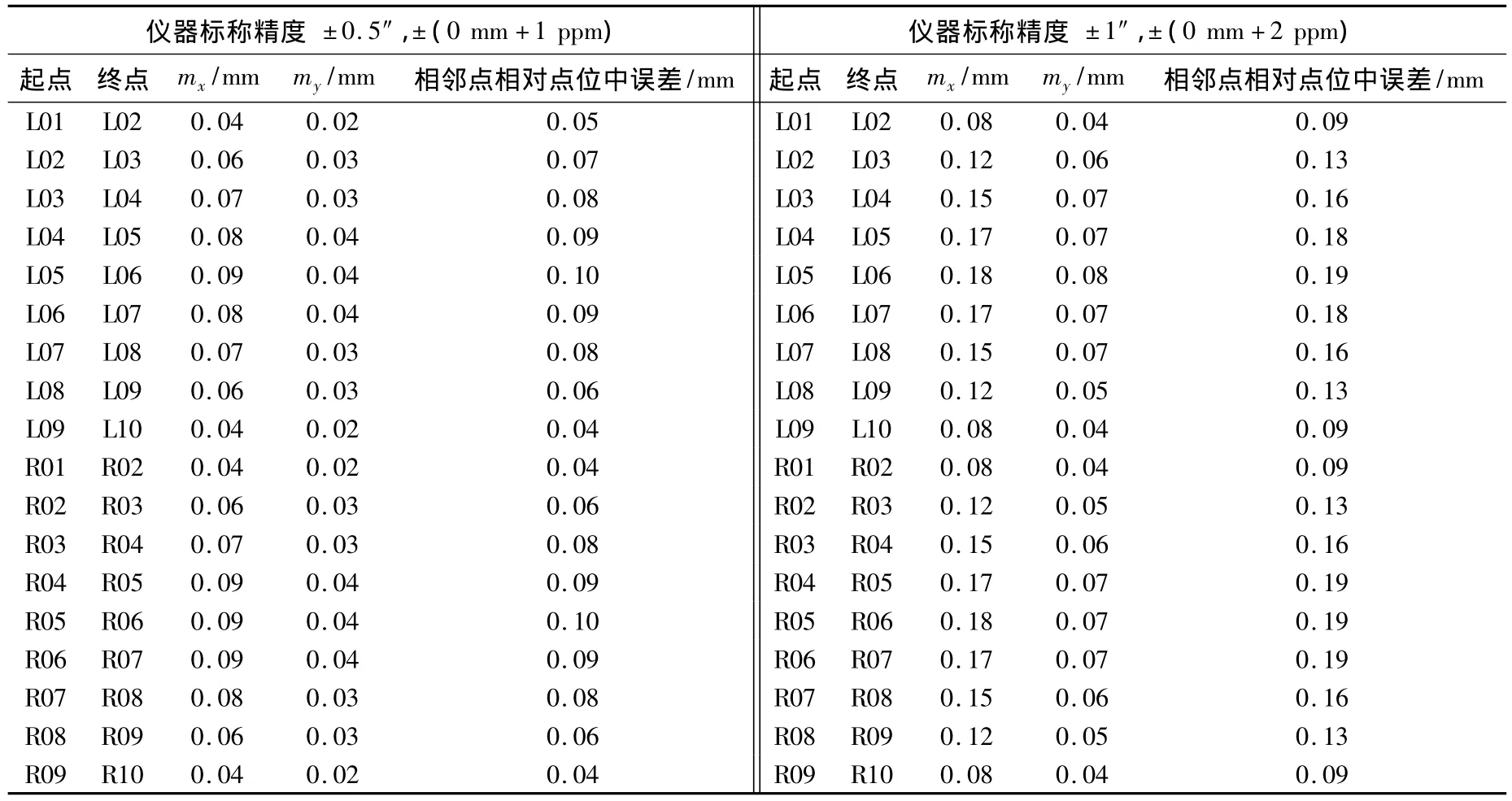
表1 构网法的相对点位中误差估算结果Table 1 Relative point precision results of Network-constructed method estimation
从表1可以看出,以构网法的方式进行TRN平面网的测量,当使用TCA2003全站仪时,相邻TRP相对点位中误差最大为0.10 mm,最小为0.04 mm,平均为0.07 mm;当使用 TCRA1201全站仪时,相邻TRP相对点位中误差最大为0.19 mm,最小为0.09 mm,平均为0.15 mm。说明当以构网法进行TRN平面网测量时,TRN平面网中相邻TRP具有较高相对精度。
3.3 构网法的试验验证与分析
为了验证TRN平面网构网法测量的精度和可行性情况,专门建立了模拟高速铁路现场的TRN实验场地。场地中TRP和CPIII点的布置情况如图4所示,CPIII点和TRP上都采用强制对中标志,然后按德国法和构网法分别进行了TRN平面网的测量实验。
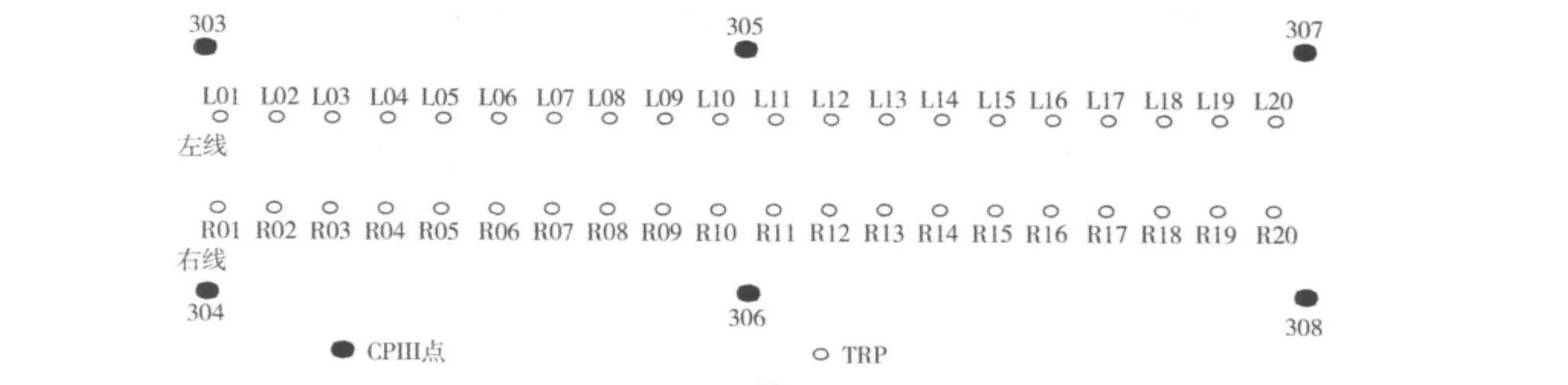
图4 TRN实验场地布置示意图Fig.4 TRN experiment place sketch map
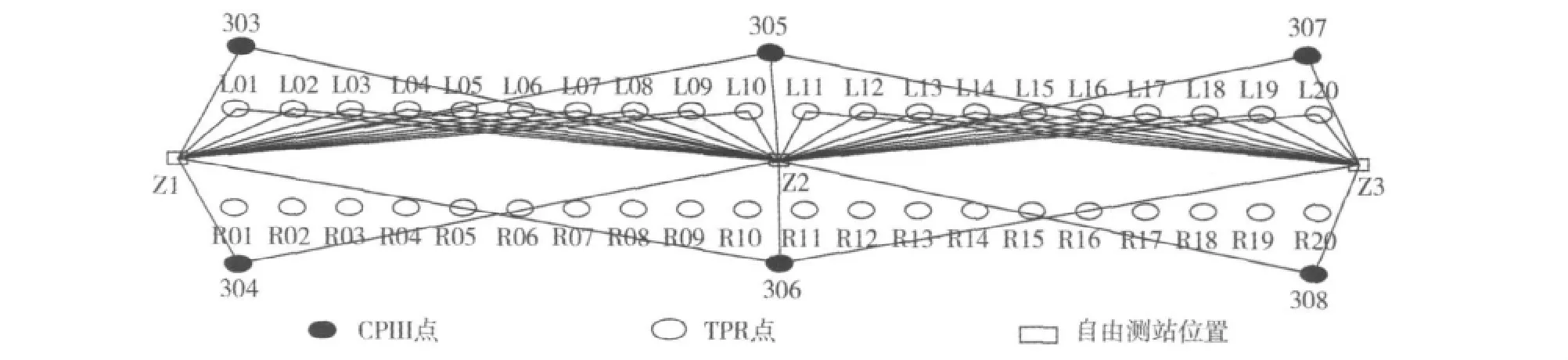
图5 构网法测量实验观测示意图Fig.5 Network - constructed method measurement experiment observation sketch map
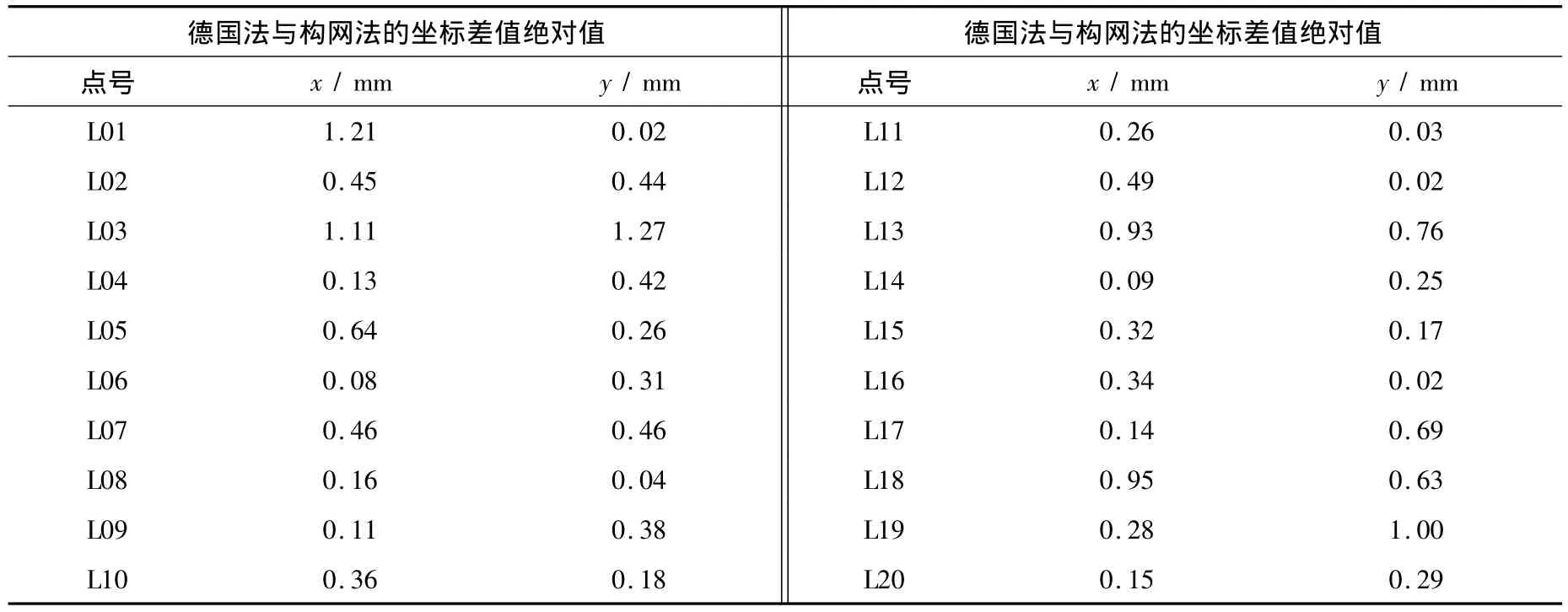
表2 德国法和构网法所测各TRP坐标比较表Table 2 The coordinate contrast of Network-constructed method and German method
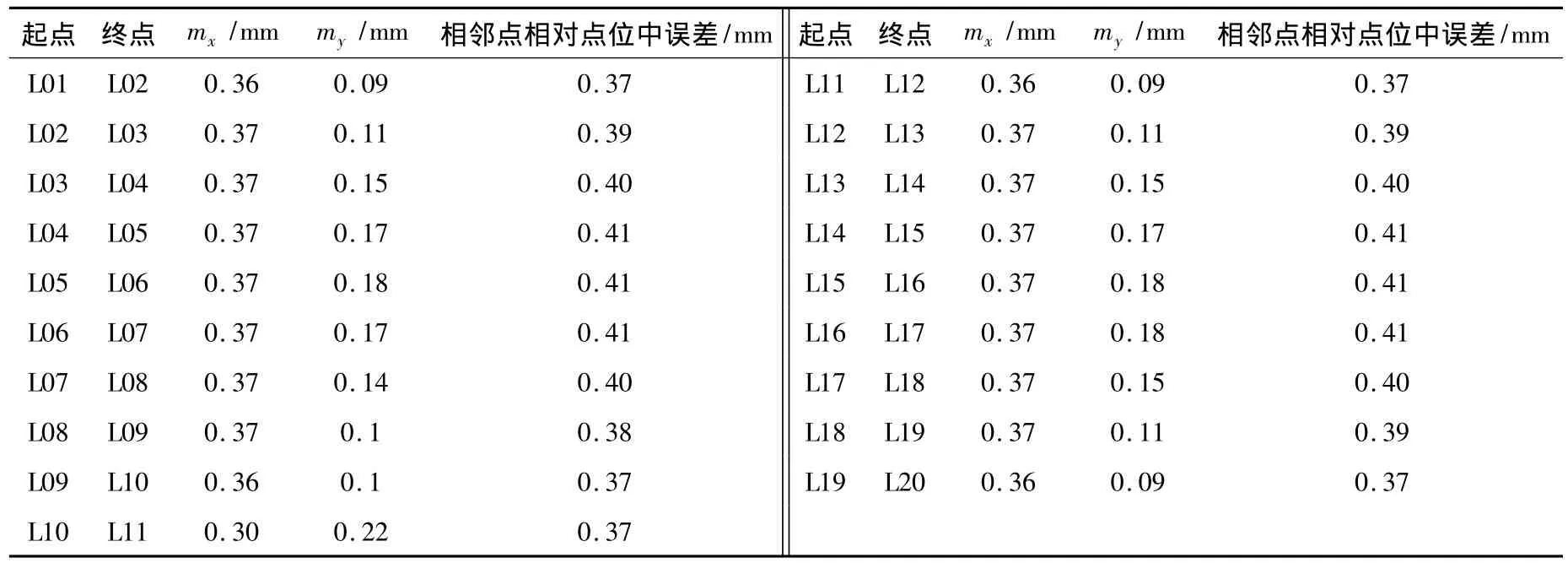
表3 构网法计算的相邻TRP间的相对点位中误差统计表Table 3 Relative point precision results of Network-constructed method computed
本次实验仅以左线的20个TRP的测量为例。TRN平面网的德国方法测量如2.1节中介绍,分2站观测,第1站观测的TRP为L01~L12,第2站观测的TRP为L108~L20;构网法的TRN平面网的测量,按构网法测量方法,分3站进行TRN平面网的测量,构网法测量实验的观测图形如图5所示。
分别按德国和构网法数据处理方法进行数据处理,所得德国法和构网法2种TRP绝对坐标比较如表2所示,构网法所得相邻TRP间的相对点位中误差如表3所示。
由表2可知,2种测量方法的各TRP坐标的差值绝对值大部分都在1.0 mm以内。x坐标差值最大为1.21 mm,平均差值为0.43 mm;y坐标差值最大为1.27 mm,平均差值为 0.38 mm。可见,2种测量方法的绝对坐标吻合较好。
由表3可知,按构网法对TRN平面网进行测量,并按边角网严密平差计算和精度评定,计算的相邻TRP相对点位中误差最大为0.41 mm,最小为0.37 mm,平均值为 0.39 mm,说明按构网法进行TRN平面网的测量精度均匀,且具有较高的精度,但比上文3.2节中估算的精度稍低,究其原因,是因为:(1)起算数据误差的影响。由于精度估算时并没有考虑起算数据误差的影响,所以估算的精度偏高;(2)标志重复性误差和环境中其他不确定因素带来的某些偶然误差的影响,而精度估算时未考虑这些因素。
4 结论
(1)TRN平面网的德国测量方法效率低、无法进行严密平差和精度评定等不足,采用构网法可以弥补这些不足;
(2)构网法测量构网方式灵活、效率更高、可靠性更强、能够进行严密的平差计算和精度评定;
(3)根据对构网法的TRN平面网的精度估算结果,认为构网法建立的TRN平面网具有较高的相邻点相对精度;
(4)通过TRN的观测实验,证明构网法与德国法所测TRP的坐标结果吻合较好,构网法的相邻TRP的相对点位精度可以控制在0.4 mm左右。综上所述,采用构网法进行TRN平面网的测量及其数据处理,不仅可行而且具有多方面优势,可供有关部门参照和推广使用。
[1]赵国堂.高速铁路无砟轨道结构[M].北京:中国铁道出版社,2006.ZHAO Guo-tang.High speed railway ballastless track structure[M]. Beijing:China Railway Publishing House,2006:74 -77.
[2]石德彬,王长进.高速铁路无砟轨道基准网(CP4)测量和数据处理研究[C]//高速铁路精密测量理论及测绘新技术应用国际学术研讨会论文集.成都:西南交通大学出版社,2010.SHI De-bin,WANG Chang-jin.Research on surveying and data processing for densification fiducial mark for tracklaying of ballastless track high-speed railway[C]//Proceedings of the International Symposium on Precision Engineering Survey Theory and Spatial Information Technology for High Speed Railway.Chengdu:Southwest Jiaotong University Press,2010.
[3]刘成龙,杨雪峰.高速铁路轨道基准网数据采集与处理系统研发报告[R].成都:西南交通大学,2010.LIU Cheng-long,YANG Xue-feng.Report on research and development of track reference network data measurement and processing system for high speed railway[R].Chengdu:Southwest Jiaotong University,2010.
[4]李毛毛.无砟轨道CPIII控制网数据处理方法研究及其软件的集成[D].成都:西南交通大学土木工程学院,2007.LI Mao-mao.Research on data processing and software integration of ballastless track base-piles CPⅢ[D].Chengdu:School of Civil Engineering,Southwest Jiaotong University,2007.
[5]刘成龙,杨友涛,徐小左.高速铁路CPⅢ交会网的必要测量精度仿真计算[J].西南交通大学学报,2008(6):718-723.LIU Cheng-long,YANG You-tao,XU Xiao-zuo.Simulated determination of accuracy requirement for control pointsⅢintersection networks in high-speed railway[J].Journal of Southwest Jiaotong University,2008,43(6):718-723.
[6]程 昂,刘成龙,徐小左.CPⅢ平面网必要点位精度的研究[J].铁道工程学报,2009(1):45-48.CHENG Ang,LIU Cheng-long,XU Xiao-zuo.Research on the positional accuracy required for CPⅢ network[J].Journal of Railway Engineering Society,2009(1):45 -48.
[7]TB 10601—2009,高速铁路工程测量规范[S].北京:中国铁道出版社,2009.TB 10601—2009,Code for engineering survey of high speed railway[S].Beijing:China Railway Publishing House,2009.
[8]贺挨宽.无碴轨道施工平面控制主要技术标准的研究[J].铁道工程学报,2006(9):27-30.HE Ai-kuan.Research on the main technical standards of horizontal control for ballastless track construction[J].Journal of Railway Engineering Society,2006(9):27-30.
[9]武汉大学测绘学院,测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003.Subject Group of Surveying Adjustment,School of Geodesy and Geomatics,Wuhan University.Theory of errors and basis of surveying adjustment[M].Wuhan:Wuhan University Press,2003.
[10]王 鹏,刘成龙,杨 希.无碴轨道CPⅢ自由设站边角交会网平差概略坐标计算方法研究[J].铁道勘察,2008(3):26-28.WANG Peng,LIU Cheng-long,YANG Xi.Research on calculation methods of preliminary coordinates for adjustment in ballastless track base-piles control pointsⅢwith free station linear angular intersection[J].Railway Investigation and Surveying,2008(3):26-28.