和谐号动车组制动力动态分配模式
2011-08-03姜岩峰曹宏发王鹏飞程宏明安志鹏
姜岩峰,曹宏发,王鹏飞,程宏明,安志鹏
(中国铁道科学研究院 机车车辆研究所,北京100081)
和谐号动车组高速运行时,如果施加制动将会产生大量的能量转换。因此制动系统需要良好的控制策略来保证安全停车的同时还有较好的运用经济性和乘坐舒适度。以下对制动系统的控制策略进行简单的介绍:
(1)和谐号动车组采用了微机控制的直通电空制动和自动制动相结合的制动控制方法,在正常运行的条件下使用电空制动作为控制手段(常用制动),当电空控制失效的时候可以启动自动制动控制方法(备用制动)。在动车上可以使用再生电制动力(简称电制力)和空气制动力,在拖车上只有空气制动力。常用制动时制动系统的指令由列车网络进行传递,因此可以传递更多的设备状态。备用制动时,通过贯穿全列的制动管减压对分配阀进行控制,从而产生制动力。
(2)制动系统接收的指令被处理为一定的制动级别,每一个制动级别表示的是制动系统需要产生的目标减速度,级别越大减速度越大。因为轮轨间的黏着力有一定的限值,且随着速度的变化而变化。因此为了充分的利用黏着的同时保证车轮尽可能的不发生滑行,制动系统制动时候遵循一定的减速度、速度、制动级别曲线。使用微机控制的电空制动系统可以根据当前的速度、制动级别等信息获得合适的减速度,保证安全有效的制动。
(3)和谐号动车组在制动力施加方式上采用了在动车上使用再生电制力和盘形制动力的方式,在拖车上采用盘形制动的方式。为了尽可能的减少摩擦部件的损耗,制动的时候尽可能的利用再生电制力,从而降低列车的运用成本。
本文将对各种制动工况下制动力在不同制动方式和车辆间的动态分配进行分析。
1 常用制动
1.1 常用制动指令计算
当制动系统接收到某个级别的指令后,制动系统会根据一定的速度、减速度和级别关系图进行计算,得到当前的目标减速度,同时制动系统根据各车制动单元的信息计算得到当前的列车车重,根据目标减速度和列车的质量可以计算得出目前列车的目标制动力。
一般来说,电空制动指令的计算分为集中式和分散式两种控制形式。集中式计算时,全列制动控制单元中只有一台负责接收列车的制动指令,经过计算后以电信号的形式将指令分发到列车中的各个制动控制单元。分散式的计算方式是指制动指令直接通过电信号分发到各个制动控制单元,由各个单元根据指令和当前制动系统的状态自行计算制动力。目前和谐号采用的是集中方式计算,有司机所在车的制动单元作为全列的计算中枢,在全列范围内进行制动力的分配。
1.2 制动力分配
因为列车编组中有动车也有拖车,其采用的制动方式也不同,因此制动时需要在各车之间进行协调。常用的方式有均衡制动控制和电制力优先控制。
均衡制动控制是各车辆承担自身的所需制动力的控制方式。此时,动车优先使用电制力,不足的部分采用空气制动力,拖车采用空气制动力。可以看出,拖车的闸片磨耗要比采用电力制动的动车要大。
电制优先控制是有效利用动车的再生制动。当动车的再生制动力达到最大值之前,优先使用再生制动;再生制动力不足部分由拖车的空气制动来承担;当制动力需求更大时候,在不超过黏着极限的情况下使用动车的空气制动补充。
1.2.1 电制动优先模式
在电制动优先模式下,为了降低空气制动部件的磨耗,优先使用再生电制力。因此制动系统按照以下3个原则在再生电制力和空气制动力之间进行分配,优先级由高到低依次为:
① 再生电制力;②拖车轴上的空气制动力;③ 动车轴上的空气制动力。基于这3个原则,电制优先模式下常用制动制动力分配流程如图1所示。
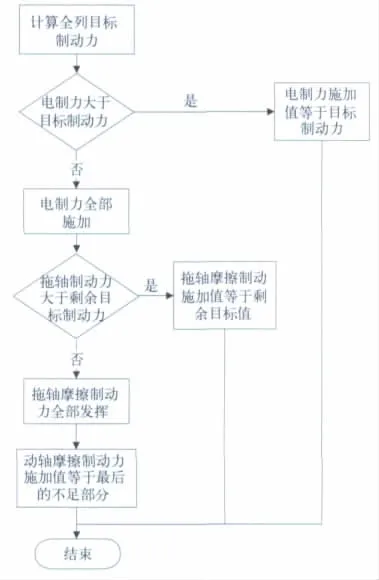
图1 常用制动制动力分配流程
1.2.2 均衡模式下的分配方法
这种模式下制动系统将在所有的轴上施加基本相同的制动力,以获得相同的黏着系数,因此施加在每辆车上的制动力与车辆的质量成正比。首先计算全列的目标制动力,然后根据每辆车在全列车重中所占的比例,将目标制动力分配给每一辆车。对于动车来说,如果可用的电制力满足制动力要求,则不用施加空气制动;如果电制力不足,则需要补充空气制动力。对于拖车来说,则必须施加空气制动力。使用均衡模式,可以防止列车的制动力过分的在某辆车上集中施加。如果集中施加,在黏着较差的情况下,有可能导致车辆的滑行。因此使用均衡模式可以在较差的黏着条件下提高列车制动性能。
1.2.3 实例分析
图2为4级复合条件下的各车制动力分配,图3为8级复合条件下的制动力。这些制动力数据采自16辆编组的CRH3和谐动车组,列车共4个牵引单元。16车和15车属于第4牵引单元,7车和8车属于第2牵引单元。其中8车和16车是动车,7车和15车是拖车。
两个图中由于制动级别不同,列车减速时的目标制动力也不同。但是从图中可以看出,8车发挥的电制力在两个级别下是相同的,这表明制动系统制动时优先利用动车的电制力。
从两图中还可以看出当制动级别为4级时,7车和15车都输出不到10kN的制动力,而在8级制动的时候,7车和15车发挥的制动力要大得多,但是此时动车的空气制动没有施加,因此可以看出在充分利用电制力后,拖车的空气制动力作为候选的制动力,参与制动。
当大约30km/h的速度时,电制力发挥的能力下降,拖车的空气制动力增加。因为在这个速度左右,制动系统会转为采用比例方式进行控制,在所有车上都施加相似的制动力。由于前期充分利用电制力,动车发挥的制动力占全列制动力比例偏大,拖车的空气制动力比例偏小,在均衡模式下需要重新进行分配。
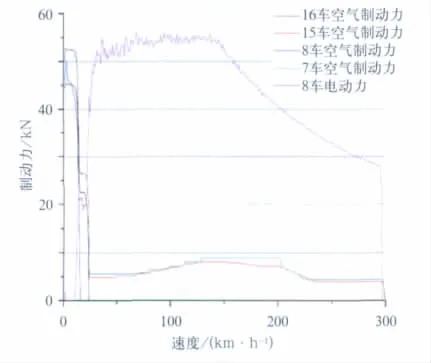
图2 4级复合条件下的各车制动力分配
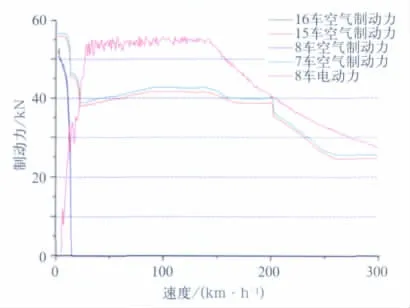
图3 8级复合条件下的制动力
1.3 电制动和空气制动转换作用过程
当列车低于一定的速度,电制力会退出。为了保证此时列车制动力总和不发生变化,需要牵引控制单元和制动系统协同工作。首先由牵引控制单元发出电制力退出信号,制动系统在接收到该信号后过一段时间才开始补充空气制动,补偿曲线的斜率和电制力退出的斜率相等,使两种制动方式发挥的制动力总和保持稳定。如图6电制退出时空电复合的关系是采集自CRH3的8车(动车)的复合制动数据。从图中可以看出,两种制动方式在低速下平滑的过渡,保证了制动力的平稳。
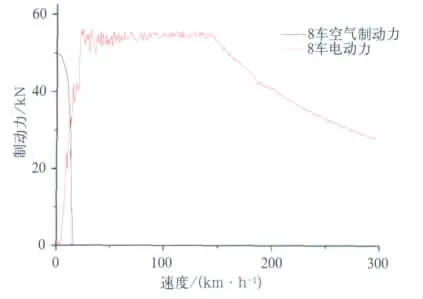
图4 电制退出时空电复合的关系
1.4 故障工况下的常用制动
1.4.1 切除单车制动力对列车制动力分配的影响
由于采用了集中计算的控制方式,当列车中单车的制动力不可用的时候,该车的制动控制单元会将该状态通过网络通知主控单元。主控单元汇总列车制动力的时候就不会计算该车制动力,由于目标减速度未发生变化,故目标制动力未变,因此其它可用的车辆就需要比以往更大的制动力。
如图5所示是部分制动切除对全列制动力分配的影响。4条曲线都是在8级复合工况下采集的7车空气制动力,分别是正常复合8级、复合8级切除16车制动、复合8级切除16车电制动、复合8级切除15车空气。7车属于第2牵引单元,15车和16车属于第4牵引单元。7车、15车为拖车,16车为动车。
可以看出在第4单元切除动车或拖车的制动力,不管是空气制动还是电制动,都会导致第2单元的7车空气制动力上升。也就是说对某个牵引单元制动系统进行切除后,造成该单元的可用制动力下降,制动系统监测到这一情况,会通过增加其它的制动单元的制动力来进行补充,从而保证全列车的制动力满足减速度的要求。
从图中还可以看出,由于16车的所有制动力被切除,造成制动力的缺失最大,因此需要在7车上补充的制动力最大。如果列车切除一辆车制动力的情况下,制动系统可以通过重新分配制动力进行补偿。
1.4.2 全部的电制力被切除
当所有的电制力都被切除后,主控单元计算总制动力的时候将不计算电制力,此时全列制动力将全部使用空气制动力,空气制动力均匀的分布在每辆车的每根轴上。此时,可能会造成摩擦部件的磨损增加,但是对列车安全停车没有影响。
2 紧急制动力分配
2.1 紧急制动的作用过程
列车运行时,当列控系统或司机认为当前运行处于紧急状态时,可以施加紧急制动。紧急制动的主要目的就是使列车能够以尽可能短的距离安全停车。此时列车将以最大可能的制动力进行制动,从而尽可能的保证安全,远离危险源。
紧急制动时,列车中相关设备产生以下动作:
① 贯穿全列的列车管排风,安装在每辆车的空气分配阀实施备用的空气紧急制动。
② 通过“紧急安全环路”触发的安装在每辆车上的紧急制动电磁阀得电,实施直通电空紧急制动。
③每车BCU检测“紧急安全环路状态”后,施加冗余的电空紧急指令。
2.2 紧急制动的分级控制
高速列车制动时,车辆的动能转化为制动盘与闸片的摩擦热能,制动盘与闸片的热负荷与速度的平方成正比。为合理分配基础制动装置的热负荷情况,并考虑到高速行驶时轮轨黏着系数的降低,制动力采用分级控制。制动力分级控制的速度切换点为200km/h;v>200km/h时,制动减速度为0.9m/s2,v<200km/h时,制动减速度为1.10m/s2。如图6紧急制动减速度曲线所示。
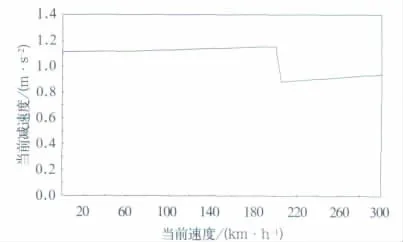
图6 紧急制动减速度曲线
2.3 紧急制动时的空电复合
紧急制动时候,如果电制动可用,则动车的电制力发挥至一个相对稳定的数值,不随车辆速度变化进行调整;动车的空气制动力根据电制力可用状态输出两种制动力,当电制力可用时,输出较低的空气制动力;当低于80km/h的速度后,电制力退出,动车空气制动输出较高的空气制动力。以上的策略目的是保证列车输出较大制动力的同时,防止动车电制力和空气制动力叠加超过轮轨的黏着极限,从而减少滑行的几率。
3 备用制动力分配
备用制动的主要目的是用于救援和回送,此时列车的直通电空制动控制失效,司机通过备用的司机控制阀控制贯穿全列车的列车管压力。列车管压力的变化使安装于每辆车的分配阀输出压力发生变化,并通过分配阀控制中继阀向制动缸充风或排风,实现列车的制动、缓解。
备用制动时,由制动管的减压量来控制各车的制动力,所以各车制动力基本相同,且各车制动力不会随着车辆速度而发生变化。由于备用制动的装备,提高了制动系统的可用性,保证了列车的安全运行。
4 结论
(1)和谐号动车组的常用制动针对不同的运行工况,制定了电制力优先模式、均衡模式,能够满足正常情况下列车运行的要求。
(2)在常用制动模式下,优先利用电制力,减少制动部件的磨损。当单车的制动力切除后,制动系统能够在全列车范围内对缺失的制动力进行补偿。
(3)列车在紧急制动时,仍优先使用电制力,制动系统能够协调电制力和空气制动力的匹配关系。
(4)当电空制动失效后,还可以使用备用制动,增加了列车的安全性。
[1]钱立新.世界高速铁路技术[M].北京:中国铁道出版社,2003.
[2]邵炳衡,张 鑫,朱仙福.高速列车制动模式探讨[J].机车电传动,1995,(5):10-15.
