和谐号动车组常用制动的控制模式
2011-08-03姜岩峰曹宏发
陈 亮,姜岩峰,尹 方,曹宏发,章 阳
(1 唐山轨道客车有限责任公司,河北唐山063035;2 中国铁道科学研究院 机车车辆研究所,北京100081)
制动系统是和谐号动车组高速运行的安全保障。列车高速运行时具有相当大的运动能量,而高速列车的制动系统必须解决列车动能的快速转换和能量消耗问题,并在轮轨黏着允许的条件下,做到高速列车的可靠制动停车或降速。另外,由于轮轨黏着系数随运行速度的提高而下降,更增加了高速制动技术的难度。为此,和谐号动车组的制动系统采用了以下技术:
(1)空电复合制动方式。由于高速列车所需的制动能量巨大,为此高速列车均采用了多种制动方式组合的复合式制动方式。除最基本的空气制动外,常见的有再生制动、电阻制动、涡流制动、磁轨制动、风阻制动等。和谐号动车组采用的是技术成熟的再生制动和空气制动的复合制动方式。在动车上配置再生制动和空气制动,在拖车上只有空气制动。列车制动时优先采用再生电制动,再生电制动不足时补充空气制动。
(2)直通式电空制动系统。随着列车速度的提高,为了提高操纵灵敏度,缩短空走时间,各种高速列车基本都采用了电空制动控制系统,从而达到制动、缓解快,停车平稳的目的。和谐号动车组采用电气指令直通式电空制动控制系统,以微处理机为控制中心,由制动控制单元发布电气指令,通过EP电空单元使制动缸动作,产生空气制动。当制动施加或缓解时,制动系统的微处理机可以通过电气指令对制动过程的冲动进行控制,从而提高旅客的乘坐舒适度,和谐号动车组的冲动值控制在0.75m/s3以内。
(3)列车网络。和谐号动车组采用了标准的列车级网络和车辆级网络,对于制动系统来说,列车网络具有两种作用,第一可以通过列车网络传递制动系统的控制指令和设备状态,从而可以实现制动系统的各种控制功能;第二可以通过列车网络和列车上的其他系统设备进行交互,如CCU,TCU,ATP等,从而列车连锁控制,保证列车的安全运行。
1 常用制动的控制原则
1.1 常用制动指令的处理
列车运行的时候,常用制动的指令来源可能有以下几种:列车控制系统、ATP、自动速度控制设备、司机制动手柄等。以上设备的指令被制动系统处理为不同的制动级别,级别越大对应的减速度也越大。由于列车轮轨间的黏着系数随着速度变化而变化,为了保证制动减速度不超过轮轨的黏着极限,制动系统可以根据当前的车辆速度确定合适的减速度值。速度、级别和减速度的关系可以绘制成为减速度曲线。
1.2 制动力分配方法
因为列车编组中有动车也有拖车,其采用的制动方式也不同,因此制动时需要在各车之间进行协调。常用的方式有均衡制动控制和电制动力优先控制。
均衡制动控制是各车辆承担自身的所需制动力的控制方式。此时,动车优先使用电制动力,不足的部分采用空气制动力,拖车采用空气制动力。因此拖车的闸片磨耗要比动车大。
电制优先控制是优先利用动车的再生制动。当动车的再生制动力达到最大值之前,基本不使用空气制动;当再生制动力不足时由拖车的空气制动来承担;当制动力需求更大时,在不超过黏着极限的情况下再用动车的空气制动补充。
1.3 单车制动力丢失的处理
当列车中的某一辆车制动设备故障时,其应该承担的部分制动力需要在全列车范围内重新分配。此时采用全列车复合制动的原则,列车中每一辆制动装置运转正常的车辆都要承担附加的制动力,使全列车范围内制动力保持不变,从而保证列车能够按照预想的减速度制动停车。
2 CRH3动车组制动控制系统
2.1 配置简介
和谐号动车组由多个牵引单元组成,每个牵引单元由功能不同的车辆组合而成。以8辆编组的CRH3动车组为例,一个动车组列车包含2个牵引单元。每一个牵引单元包含4辆车,分别为端车(EC01)、变压器车(TC02)、变流器车(IC03)、中间车(BC04)。其中端车和变流器车是动车,变压器车是拖车,每辆车上都配备有制动系统。动车上包含两种制动装置,电制动和空气制动,拖车上只有空气制动。制动系统的控制部分称为制动控制单元(BCU),可以根据制动指令和当前车辆的配置状况,控制电制动和空气制动装置。
以CRH3动车组制动系统配置为例,每个牵引单元的制动系统配置如图1所示。从图1中可以看出,在每个牵引单元中装备了7台BCU,其中BCU1.2和BCUx.1参与常用制动的控制,BCU2.2和BCU4.2用于车轮抱死监测。牵引单元各BCU之间通过MVB总线通信;为了和其他牵引单元的BCU通信,在MVB网络和WTB网络之间加入了网关,通过WTB总线进行通信。通过WTB/MVB两级网络,实现了全列车BCU之间的数据交换。
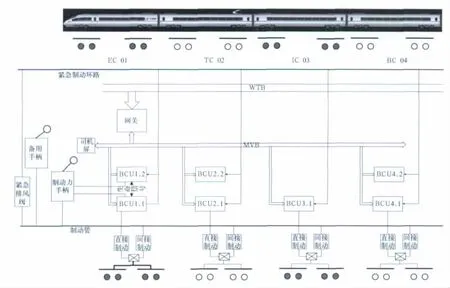
图1 CRH3动车组制动系统配置
2.2 常用制动相关设备
在制动系统中,每个设备都有其特定的功能,各个设备之间按照功能划分进行协作,共同完成制动指令在全列范围内的传递和执行。此外,制动系统工作时候还需要其他系统的相关设备提供必要的信息和指令,如CCU、TCU等。整个制动系统设备功能分布如图2制动系统指令层次图所示,以下将对相关设备进行简单介绍。
(1)局部BCU
局部 BCU 包 含 BCU1.1,BCU2.1,BCU3.1,BCU4.1。以上BCU的作用是计算本车的最大可用空气制动力、当前空气制动实际发挥能力以及其他状态信息,通过MVB网络将数据发送至SBM,并从SBM接收制动指令,直接控制本车的空气制动设备,产生制动力。
(2)分段制动管理器(SBM)
SBM的功能是段管理,主要是收集本牵引单元内制动系统相关设备的信息,汇总后向TBM汇报,同时从TBM获取指令,并分发到本网段内各个相关的设备。SBM收集的消息包括每个BCU能够发挥的最大空气制动力和实际空气制动力,每个TCU的最大可用电制动力等。
只有端车内的BCU1.1和BCU1.2可以作为SBM,在一个牵引单元内,同一时间只能有一台BCU激活成为SBM。两台BCU之间可进行工作状态交换,当其中一方工作不正常的时候,另外的一台BCU可以成为SBM,从而保证了制动系统的可靠工作。
(3)列车制动管理器(TBM)
TBM控制并协调列车的所有常用制动系统。当有制动指令时,TBM计算当前车辆所需要的总制动力,并汇总各个SBM发送过来的可用电制动力和空气制动力,按照一定的方法计算得到当前电制动力和空气制动力的指令,并通过WTB/MVB网络发送到SBM。
当司机室的控制功能激活时,所在端车的BCU1.1或BCU1.2会成为TBM,每一列车只能有一个BCU成为TBM。在当前的TBM有的情况下,另外的一台BCU可用通过生命信号获取到这一状态,并取代故障BCU成为TBM。当BCU成为TBM的时候,同时BCU也是SBM。
(4)牵引控制单元TCU
牵引控制单元收集当前牵引装置能够发挥的最大电制动力和实际发挥的电制动力,上报至SBM。并从SBM获取当前TBM分配给电制部件的制动力指令,施加电制动力。
(5)中央控制单元CCU
CCU是整个列车运行的管理者,每一个牵引单元中都有一个CCU。BCU从CCU获取当前列车的配置如牵引单元的个数、当前牵引单元的编号、当前列车速度、制动指令等。
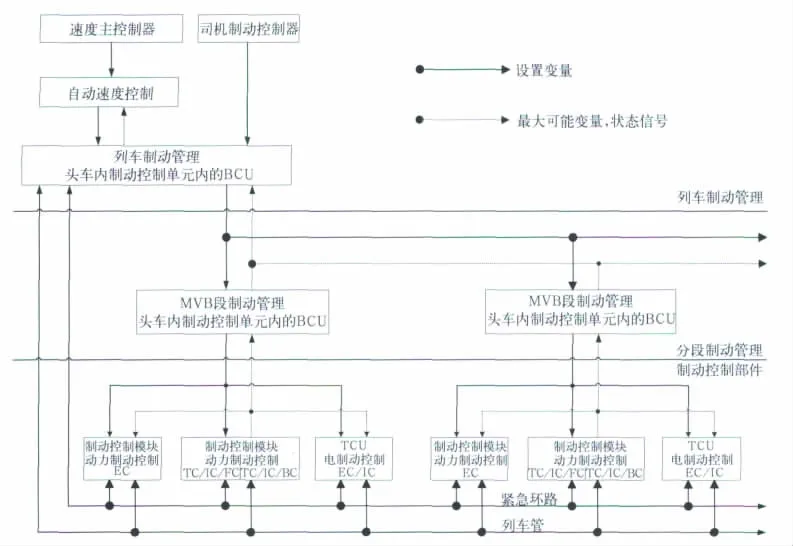
图2 制动系统指令层次图
2.3 常用制动控制流程
在运行过程中,制动系统实时的执行3个主要任务,①制动状态的收集;②制动指令的获取;③制动指令的分发和执行。如图3常用制动的基本流程所示。
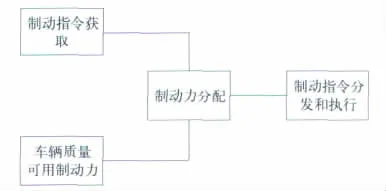
图3 常用制动的基本流程
(1)制动指令获取
常用制动指令来源有3个,①制动力控制手柄;②ASC;③最大常用制动指令。TBM作为制动控制的列车级设备,统一接收上述常用制动指令。
制动手柄是最常用的制动指令来源,通过制动手柄获取的是对列车减速度的要求。手柄总共有9个制动级别,从1A到FSB(最大常用制动),制动减速度依次提高。在最大常用制动时平均减速度为0.8~1.0m/s2。由于列车轮轨间的黏着系数会随着速度的增加而减小,因此需要制动系统根据当前列车的速度实时计算需要的减速度。制动减速度和速度之间的对应关系可以绘制成为减速度曲线,手柄级别和列车速度与制动力之间的关系如图4所示。图中N2表示常用制动2级,FSB表示最大常用制动。获取到减速度指令后,TBM会做相应计算,并把指令发送到全列制动设备。
ASC(自动速度控制)是列车的一个重要功能,司机可以使用定速手柄控制列车速度。此时,制动手柄必须处于缓解位,TBM通过网络获取ASC发给空气制动部件和电制动部件的制动指令,并将该指令转发至全列。
此外,制动系统还接收来自CCU的FSB指令。当CCU根据当前的列车状态,判断需要快速停车保证安全时,会向制动系统发出FSB命令。TBM接收到FSB命令后,会根据减速度曲线中的数据计算减速度,并生成制动指令传送至全列车制动设备。
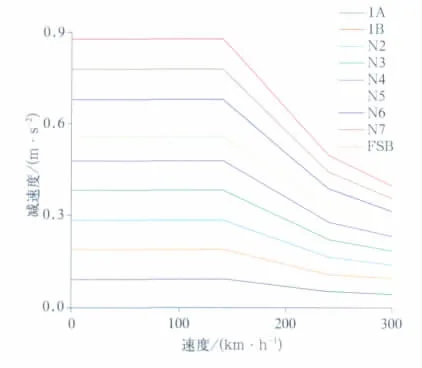
图4 手柄级别和列车速度与制动力之间的关系
(2)车辆可用制动力计算
列车运行时,安装在每辆车上的BCU会计算当前车辆的质量和能够发挥的最大空气制动力和电制动力,此项工作主要由局部的BCU和TCU进行。
本车可用制动力的计算需要考虑车重,为了获取车辆的质量,制动系统安装了压力传感器监测空气弹簧的空气压力。车辆质量的变化可以实时的反应到空气弹簧的压力上,因此通过监测压力传感器的压力值,可以计算当前车辆的质量。当压力传感器信号故障时,则使用最大车辆质量的2/3作为默认的质量。
车质量确定以后,局部BCU和TCU在计算可获得的最大制动力时还要考虑以下几个因素:制动盘的热负荷、最大黏着力、直接制动的可用性。为了保证制动盘在高速阶段制动时不产生过热问题、制动力不超过轮轨黏着力,制动设备上安装了电磁阀用来控制制动系统输出的空气制动力。当列车运行在高速阶段或者动车的电制动力可用,则制动设备输出较低的制动力。
当车辆可用制动力计算完成后,对拖车来说本车可用的空气制动力就等于车辆可用制动力。对动车来说,如果电制动力可用,则电制动力可用值等于TCU计算的可用值,空气制动力可用值等于车辆可用制动力减去电制动力可用数值。
(3)制动力分配
TBM根据当前的目标减速度a和汇总后的列车质量m,根据公式:
可以算出目前全列车的目标制动力,然后TBM会根据一定的制动力分配策略将制动力在全列车范围内进行分配。
常用制动的制动力分配分为3种子模式:正常模式、比例模式和清扫模式。正常模式对应的是电制动优先的模式,比例模式对应的是均衡控制模式。
通过按动制动控制手柄上的模式按钮,可以在3种子模式之间进行转换,3种子模式的转化关系如图5所示。
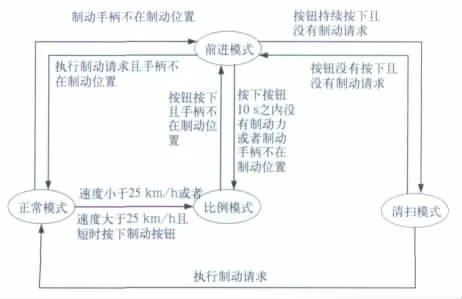
图5 3种子模式的转化关系
在正常模式下,按照以下顺序进行分配:
(1)动车的电制动力;(2)拖车的空气制动力;(3)动车的空气制动力。
比例模式下,TBM将在所有的轴上施加相似的制动力,以获得相同的黏着系数。这样可以在较差的黏着条件下改善制动性能。
清扫模式主要是融化制动盘上的冰雪以及清洁制动盘,此时仅使用空气制动,并在制动盘上施加相同的制动力。
(4)制动指令的传递途径
制动指令的传输主要通过SBM实现的。制动过程中,单元内的BCU和TCU将本车可用的空气制动力、电制力、车质量等信息发送到 MVB网络上,SBM的将上述信息汇总后发送到MVB上,然后通过网关转发后经WTB网络到TBM所在的牵引单元并被TBM接收。
TBM对制动力进行分配后,将分配信息发送到MVB网络上,网关将分配信息经WTB网络发送到其他的牵引单元,被相应的SBM接收后,进行转换并在此发送到MVB网络被局部的BCU和TCU接收并执行,从而完成制动。
3 结论
综上所述,和谐号动车组的常用制动特点如下:(1)和谐号动车组制动系统采用再生电制动力和空气制动力相结合的复合制动方式。
(2)采用标准的列车网络作为常用制动执行和信息的传递通道,提高了制动系统的操作灵敏度。
(3)通过车辆、列车两级网络实现了在不同的牵引单元间制动设备的相互协作,通过对制动设备功能的合理划分,实现了牵引单元级别和列车级别的制动控制,保证了各种条件下全列车制动力的稳定施加。
(4)通过对关键控制设备的冗余配置,提高了制动系统运行时的可用性。
[1]钱立新.世界高速铁路技术[M].北京:中国铁道出版社,2003.
[2]彭俊彬.动车组牵引与制动[M].北京:中国铁道出版社,2007.
