椭圆类齿轮参数化设计与运动仿真系统的开发
2011-07-31姜衍仓1田芳勇2胡赤兵3
姜衍仓1,田芳勇2,胡赤兵3
椭圆类齿轮参数化设计与运动仿真系统的开发
姜衍仓,田芳勇,胡赤兵
(1. 濮阳职业技术学院建筑工程系,河南濮阳 457000;2. 兰州理工大学机电工程学院,甘肃兰州 730050;3. 兰州理工大学数字制造技术与应用省部共建教育部重点实验室,甘肃兰州 730050)
非圆齿轮因其节曲线为非圆形,计算复杂,设计困难,目前的三维设计软件都无法直接进行实体建模。根据非圆齿轮的设计理论,利用Visual Basic 6.0良好的界面设计功能和计算能力对SolidWorks进行二次开发,设计出椭圆类齿轮参数化设计与运动仿真系统,实现了椭圆类齿轮的三维参数化建模与运动仿真。论述了系统的开发过程,运行实例表明系统界面友好,设计正确。解决了椭圆类齿轮设计中的复杂计算和三维实体造型难的问题,可提高设计精度、缩短产品开发周期,保证产品质量。
计算机应用;椭圆齿轮;参数化设计;运动仿真
非圆齿轮具有变传动比传动的特性,在运动性能、承载能力以及结构可靠性等诸多方面都明显优于其他具有同样运动特征的机构,经过近百年的研究和发展,非圆齿轮啮合理论日趋成熟,逐步应用于纺织、卷烟、造纸等机械设备中。但由于非圆齿轮节曲线为非圆形,设计、制造尤其是三维造型困难,还远没有得到像圆柱齿轮那样广泛普及和应用。近年来,随着计算机辅助设计和数控加工技术的不断发展,非圆齿轮的设计、加工出现了广阔前景。
椭圆类齿轮是目前应用最广泛的非圆齿轮。利用Visual Basic 6.0良好的界面设计功能和计算能力对SolidWorks二次开发,设计出椭圆类齿轮参数化设计与运动仿真系统,实现椭圆类齿轮的三维参数化设计与运动仿真。
1 椭圆类齿轮的设计
椭圆类齿轮的设计主要有两个步骤,一是确定齿轮副的节曲线,二是确定齿轮的其他几何参数,特别是齿轮的齿廓,以保证齿轮副能按正确的节曲线传动。
1.1 节曲线的设计
(1)节曲线方程
由文献[2]可知,椭圆类齿轮节曲线方程为
(2)凹凸性校验
椭圆类齿轮节曲线为非圆形,其上各点处的曲率半径不同。当曲率半径为正时节曲线在相应点处外凸,反之内凹,而内凹部分是不能用齿条形刀具或滚刀加工的,故设计椭圆类齿轮时,要对节曲线的凸性进行校验。无内凹条件为

(3) 压力角校验
与圆柱齿轮不同的是,非圆齿轮节曲线上各个齿的齿廓是不同的,其上的压力角也不相等。压力角过大时可能产生自锁,使齿轮副无法传动,故设计椭圆类齿轮时,应对压力角进行校验,最大压力角应不超过65°。
(4) 根切校验
与加工圆柱齿轮类似,加工椭圆类齿轮时,也可能发生根切现象。故设计椭圆类齿轮时,应校验它是否满足不成生根切的条件
(5) 轮齿在节曲线上的位置
椭圆类齿轮为节曲线封闭的非圆齿轮,要保证轮齿在节曲线上均匀分布,则应满足下式

一般说来,设计时随意确定的节曲线参数,很少能恰好满足上式。设计者必须通过改变节曲线的某些参数,或者改变齿数、模数等进行反复计算,直到满足上述要求为止。
1.2 其他几何参数的设计
由于椭圆类齿轮和圆齿轮一样都可以用齿条形刀具或插齿刀加工,故椭圆类齿轮的模数、齿高、齿距等一系列参数的确定和圆齿轮一样。
(1) 齿顶曲线与齿根曲线
椭圆类齿轮的齿顶曲线与齿根曲线理论上是节曲线的法向等距线,分别是节曲线沿法向偏移一个齿顶高和齿根高的距离。
(2) 长轴半径与中心距
椭圆类齿轮的弧长由下式计算

(3) 齿廓曲线
椭圆类齿轮各个轮齿的齿廓不尽相同,其设计和计算相对要比圆齿轮复杂的多。椭圆类齿轮的齿形,严格来说,是应按其齿廓曲线的解析方程来确定。用直线和圆弧来拟和其上的点,只要计算出的点多,则用这种方法得到的齿廓就够精确,不足之处就是方程式复杂,计算量大、费时繁琐。另一种方法是折算齿形,把各齿折算成其当量圆齿轮的齿形,此法只要按每个轮齿分别进行折算,其结果得到的齿形也能达到一定的精确度,该法无需大量的计算,简便快捷、切实可行。选用标准的渐开线齿廓作为椭圆类齿轮的齿廓,它不仅能满足齿轮副运动时的共轭要求,而且渐开线齿廓互换性好、便于使用标准刀具加工。
由椭圆类齿轮节曲线方程(1),可得节曲线上各轮齿中心的曲率半径

2 系统的开发
目前的三维软件并没有提供直接生成椭圆齿轮的功能。本系统采用SolidWorks软件作为二次开发平台,在VB6.0环境中利用SolidWorks API功能创建ActiveX DLL文件,使其作为一个插件集成于SolidWorks环境中,如图1所示。
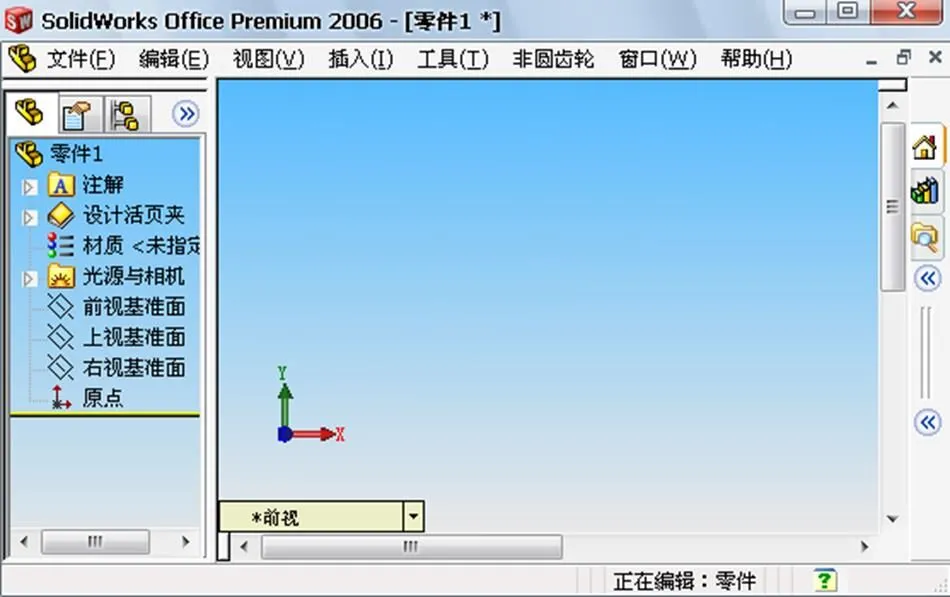
图1 “非圆齿轮”插件示意图
2.1 系统的组成与运行过程
系统由参数输入模块、参数计算模块、三维建模模块和运动仿真模块组成。系统界面如图2所示。运行原理为:点击窗体中的“三维建模”按钮,编制应用程序界面,读取界面并录入初始参数,点击窗体中的“计算”按钮,计算出相关参数并生成齿轮的二维草图,供SolidWorks 程序调用。运行设计窗口时,点击窗体中的“三维建模”按钮,在SolidWorks 环境下进行齿轮三维实体建模,得到所需要的齿轮实体。点击窗体中的“运动仿真”按钮,在SolidWorks 环境下进行三维实体的啮合运动仿真,并得到主动轮与从动轮的角速度曲线。点击窗体中的“返回”按钮,退出系统。

图2 系统界面
2.2 VB6.0与SolidWorks接口的实现
在VB6.0环境中利用SolidWorks API功能创建ActiveX DLL文件。VB6.0程序与SolidWorks接口的实现程序部分代码如下:
Implements SWPublished.SwAddin
Dim iSldWorks As SldWorks.SldWorks
Dim iCookie As Long
Private Function swAddin_ConnectToSW (ByVal
ThisSW As Object, ByVal Cookie As Long) As
Boolean
Set iSldWorks = ThisSW
iCookie = Cookie
iSldWorks.SetAddinCallbackInfo App.hInstance, Me,
iCookie
Call addinterface
swaddin_connectstosw = True
End Function
3 应用实例
设计一对椭圆齿轮传动,主动轮与从动轮相同,其参数如下:模数=3,齿数=21,阶数=3,偏心率=0.1,齿厚=10,刀具齿形角=20°,中心孔直径=10。
打开SolidWorks软件,点击菜单栏“非圆齿轮”进入设计系统,输入设计参数,点击“计算”按钮得到所设计齿轮的全部参数,如图3所示。

图3 参数输入界面
点击“三维建模”按钮,生成三维模型如图4所示。

图4 三阶椭圆齿轮三维模型
点击“运动仿真”按钮,进入SolidWorks界面,调用SolidWorks插件COSMOSMotion插件,设定两椭圆齿轮均为运动零部件,为两齿轮添加旋转副,并为一齿轮添加一个以角速度为360°/秒绕轴旋转的运动,设定中心距,添加3D碰撞,仿真开始进行。不同啮合位置的仿真结果如图5所示。
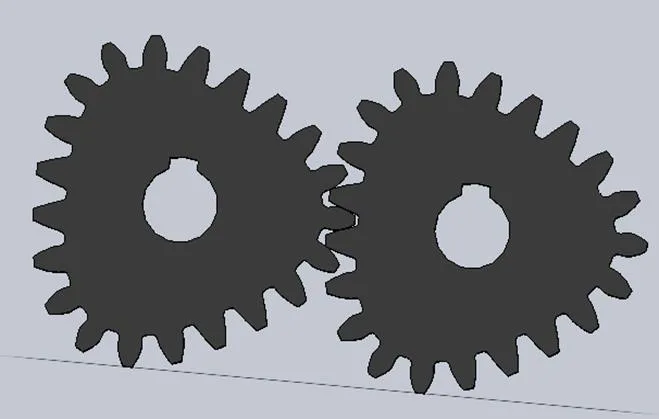
仿真结果显示,两椭圆齿轮无干涉现象,啮合时侧隙均匀,运转平稳,表明设计正确。
4 结束语
在SolidWorks环境下,利用VB6.0良好的界面设计功能和计算能力对SolidWorks平台进行二次开发,开发出椭圆类齿轮参数化设计与运动仿真系统,实现了椭圆类齿轮的三维参数化设计与运动仿真,运行实例表明设计正确。系统界面友好,设计方便、绘图准确,解决了椭圆类齿轮三维设计与造型的难题。避免了重复性劳动,缩短了产品设计周期。
[1] 李福生. 非圆齿轮与特种齿轮传动[M]. 北京: 机械工业出版社, 1983. 58-61.
[2] 吴序堂. 非圆齿轮及非匀速比传动[M]. 北京: 机械工业出版社, 1997. 40-41.
[3] Bair B W. Computer aided design of elliptical gears [J]. Journal of Mechanical Design, 2002, 124 (12): 787-793.
[4] 高雪强. SolidWorks中的非圆齿轮实体建模方法研究[J]. 工程图学学报, 2009, 30(4): 189-192.
[5] 苏朝晖. 椭圆齿轮几何参数计算及齿形仿真[J]. 现代制造工程, 2008, (12): 54-57.
[6] 王湘江, 廖卫献. 用CAD 软件作图法设计椭圆齿轮[J]. 机械, 2001, 28(6): 50-51.
[7] 贾 松, 胡青春. 基于CAXA 的非圆齿轮的三维造型与设计[J]. 机械传动, 2005, 29(1): 30-32.
[8] 武传宇, 金玉珍, 贺磊盈. 基于包络特征的非圆齿轮齿廓计算方法研究[J]. 中国机械工程, 2008, 19(15): 1796-1799.
[9] 叶炜威, 余才佳. SolidWorks 2006实体建模与二次开发教程[M]. 北京: 国防工业出版社, 2006, 301-306.
Development of Parametric Design and Motion Simulation System of Elliptical Type Gears
JIANG Yan-cang, TIAN Fang-yong, HU Chi-bing
( 1. Department of Architecture and Civil Engineering, Puyang Vocational and Technical College, Puyang Henan 457000, China;2. College of Electrical Engineering, Lanzhou University of Technology, Lanzhou Gansu 730050, China;3. Key Laboratory of Digital Manufacturing Technology and Application, Lanzhou University of Technology, Lanzhou Gansu 730050, China )
Calculation and design of non-circular gears are complex and difficult because of their non-circular pitch curves and current three-dimensional design software can not directly realize the modeling of non-circular gears. According to non-circular gear design theory, an elliptical type gear parametric design and motion simulation system is designed through secondary development of SolidWorks by using Visual Basic 6.0, through which the 3D parametric modeling and motion simulation of elliptical type gears can be realized. The system development process is discussed in the paper, and application examples show that the system is of user-friendly interface and correct design. The complexity of calculation and the difficulty of 3D modeling in elliptical type gears design are solved. This system can improve design precision, shorten the development cycle, and guarantee the quality of products.
computer application; elliptical gear; parametric design; motion simulation
TP 391
A
1003-0158(2011)03-0013-04
2010-06-01
甘肃省自然科学基金资助项目(0809RJZA014)
姜衍仓(1958-),男,河南濮阳人,副教授,主要研究方向为CAD。
