基于数字照相技术的边坡变形自动化监测技术研究
2011-07-25罗仁立刘学增
罗仁立, 刘学增
(1.中国中铁二院工程集团有限责任公司,四川成都610031;2.同济大学地下建筑与工程系,上海200092)
0 引言
在岩土工程中,边坡安全问题一直是工程技术和科研人员关注的焦点。目前进行边坡位移监测的方法很多,有大地观测法、仪表观测法、GPS观测法、近景摄影测量法等[1-2]。传统的近景摄影测量被用于监测大面积滑坡,通常方法是把两台近景摄影仪(摄影经纬仪或量测相机)固定安置在两个不同位置的测点处,同时对滑坡区观测点摄影形成立体相对,再利用立体坐标仪测量相片上观测点的坐标,根据历次观测点坐标的变化,得出边坡的位移特征。该方法观测的绝对精度不如某些传统测量手段,相对精度方面,可以满足崩滑体处于速变、剧变阶段的要求。不过由于设站容易受到地形限制,内业数据处理工作繁重,专业化程度要求较高,摄影仪较昂贵等原因使该方法的优势未能充分发挥出来,造成近景摄影测量在滑坡监测中应用不是很广泛的局面。在基于数码相机的近景测量上,王成亮[3]使用普通数码相机对边坡建立了准三位和三维控制场,但是还停留在室内试验阶段;国外文献[4]中摄影测量方法能较精确的获取测点三维空间位移值,于35 m距离可达到1 mm的精度,但该方法对每个测点位置需根据7张不同位置拍摄的图像。考虑各相机内方位元素差异,该方法难以在实际应用中实施。
在此情况下,本文提出一种廉价、快速、高效、便捷、安全、无量程限制、具有实际应用价值的边坡监测方法。本文提出的边坡监测技术是一种瞬间获取被测物体大量物理信息和几何信息的测量手段,采用非量测相机,通用性强,价格大大低于量测相机且达到较高精度,编制程序调用相机SDK实现自动控制拍照,采用GPS无线网络实现拍摄数据交换和远程控制,达到远程适时控制目的。本文对该技术进行了理论分析、室内试验、现场试验和误差分析,说明其可行性。
1 边坡自动化数字照相监测系统
1.1 系统组成
固定数码相机拍摄小位移物体,位移相对于相机与物体距离可以忽略,所拍摄的照片中两点的像素距离与这两点的实际距离始终保持正比关系。据此建立比例关系

式中,δa为标志点实际位移;Da为两标志实际距离;dp为该两标志像素距离;δp为标志点像素位移。据此,在边坡上埋设标志点,以标志点位移反映边坡位移变形,通过数码相机适时拍摄标志点,以第一张照片为比例基准,分析比较后续照片得出边坡位移。
本系统主要由自动摄影测量设备和外围设备组成。摄影测量设备包括数码相机(佳能G9,1 200万像素)、标志点、图像处理用工控机;外围设备包括标定板、连接设备、无线数传终端、负责接收分析数据的服务器等。图1是系统运行简要流程图。首先在边坡上埋设标志点,对两个距离最远的标志点中心的实际距离进行精确量测,安置相机于边坡对面固定点,控制相机以一定的时间间隔对边坡连续拍照,所获取照片直接存储于工控机,对图像进行识别。识别结果通过无线数传终端上传至服务器,对数据进行分析,计算位移量和位移变化速度,必要时缩短拍照间隔加强监控,并进行预警,由此实现远程实时监控。
1.2 图像处理技术
1.2.1 标志比选
摄影测量的精度主要取决与三个方面,即相机分辨率、标定精度及像点坐标量测精度。像点坐标量测精度是建立在对标志中心的精确识别,进而对标志中心进行量测的。为精确确定标志中心,对标志形式和大小进行方案比选。标志形式选择应结合获得标志中心像素位置的图像处理算法进行选择,包括:求重心法;边缘检测法;圆形轮廓亚像素求圆心法。标志形式初选为:白色正方形,黑白相间方形,黑底白圆(见图2)。

图1 系统流程
白色正方形方案采用检测标志区域得出区域内像素点总和求出标志的重心,可能与背景对比度不够,正方形四角会发生畸变,精度不够高。黑白相间方形方案利用hough变换找出黑白交界的两条相互垂直的直线方程,求出交点视作中心点,由于黑白相间中心(即两直线相交处)会在数码相机拍照后发生失真(见图3)中心点变为白色,所得直线方程有偏差,精度不够高。
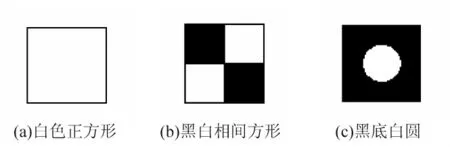
图2 识别标志图
黑底白圆方案采用亚像素技术,相对前两种方案精度高、适应性较强,因此,本文采用此方案。
1.2.2 图像预处理
在实际图像处理过程中,由于硬件、环境等因素可能造成获取图像欠曝、过曝、噪声过多等问题,不利于标志图像识别工作,此时需进行图像预处理,包括:二值化、去噪、灰度拉伸、插值运算等。例如当标志图像过小,识别算法会造成较大误差,此时可先使用图像插值放大算法,然后对其进行识别,求得中心坐标后,比例缩放以附和原坐标。
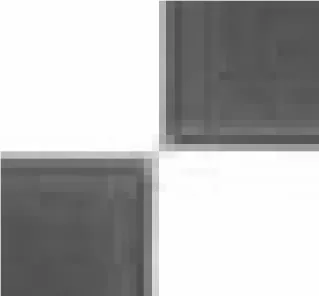
图3 黑白相间方形失真
1.2.3 亚像素图像处理
采用圆心亚像素识别算法对标志图像进行识别。经测试,当圆图像半径在5~50个像素时识别精度在0.01~0.039像素之间,基本符合理论识别精度[5],其计算过程分三个步骤实现:
(1)运用重心法粗略确定圆心位置与半径。首先利用matlab将图像由彩色图像转换为灰度图像,再利用阈值分割技术,计算全局阈值,将图像转换为二值图像,从图像中提取黑底白圆标志,计算其重心坐标,由重心到边缘距离定半径。
(2)运用亚像素掩模技术,用构造的掩模基于圆心以一定角度(20°)旋转寻找圆边缘精确位置,得到36组圆边缘点坐标[6]。图4中C2圆为掩模,C1圆为待测圆,C2圆与C1圆相交,通过空间矩方法得到两交点坐标P1、P2,L为P1、P2通过的直线,再通过坐标转换得到在待测圆C1坐标系下P1、P2坐标。
本文中为提高识别精度,采用5组9×9大小矩阵掩模Mi

图4 OCD法示意
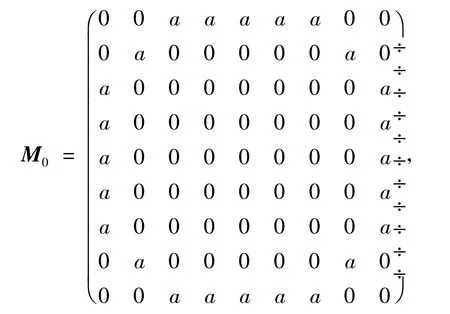
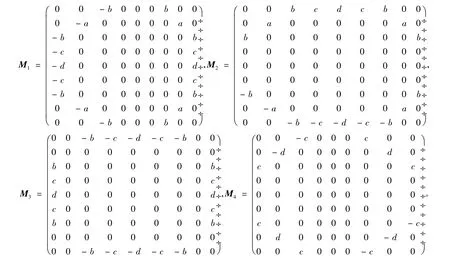
以C2圆心为坐标原点,则掩模与待测圆的空间系数为

直线L自铅直方向的转角θ(顺时针)为

直线L与掩模距离ρ为

P1点相对水平方向的转角σ为

已知ρ、σ可由极坐标公式求得在C2圆心坐标系下P1、P2坐标,通过坐标转换得出在C1圆心坐标系下P1、P2坐标。
(3)基于寻找到的待测圆边缘点进行圆的最小二乘拟合[7-8],得到圆心坐标。设圆方程为

由最小二乘法

解方程可得圆心亚像素坐标。
由于使用大量圆边缘点确定圆心,因此该算法对噪声具有较好的容忍性。
1.3 系统集成
本系统采用VC6.0进行软件开发。考虑到matlab强大的图像处理功能,采用matlab进行图像处理开发。与VC开发环境以com组件对接,实现在无matlab环境下仍可运行。对数码相机SDK进行二次开发,通过计算机固定焦距,控制拍照时间和频率。服务器与现场工控机采用GPS无线连接,由程序实现拍摄信息自动从工控机传输至服务器和服务器向工控机发送控制拍摄间隔时间的指令。由此实现系统的自动化监测。
1.4 室内测试
室内试验使用标志板(图5)作为拍摄对象,首先在不同距离对其进行拍摄,然后在同一距离不同时间进行拍摄,并进行精度分析。
如图5所示,标志板使用了内部白色圆直径分别为100 mm和50 mm大小的标志进行比选。中间两大圆间距离与下部两小圆之间距离相等,为290 mm。保持标志板位置不变,移动相机位置令二者间距离从10 m间隔5 m增大到50 m,对其进行拍照,识别各圆心位置并求圆心距离,得到识别结果如图6所示。可见,对100 mm圆的识别结果在前40 m精确而稳定,误差在0.1 mm左右,40 m以上识别结果不是很稳定。在40 m时误差较大,达到1.3 mm。
分析50 mm直径圆标志识别误差较大的原因为该标志过小,在较远距离(50 m)时其直径仅占7个像素左右,边缘较模糊,只是识别结果偏差较大。在后续试验中均选用直径100 mm圆标志。
固定相机和标志板间距离进行连续拍摄,并分别识别A、B、C、D 4个大圆,绘制位移曲线如图7所示。可见,各测点以小幅度波动,从绝对位移曲线来看,波动幅度在1 mm以内。从X和Y方向位移曲线可见,位移情况基本上是以0点为中心波动,分布图形类似正态分布(图8)。各测点位移曲线波动不超过1 mm,其方向和大小基本一致,可以看出波动是由相机轻微震动引起,说明运用该系统进行分析,其结果具有较高稳定性。
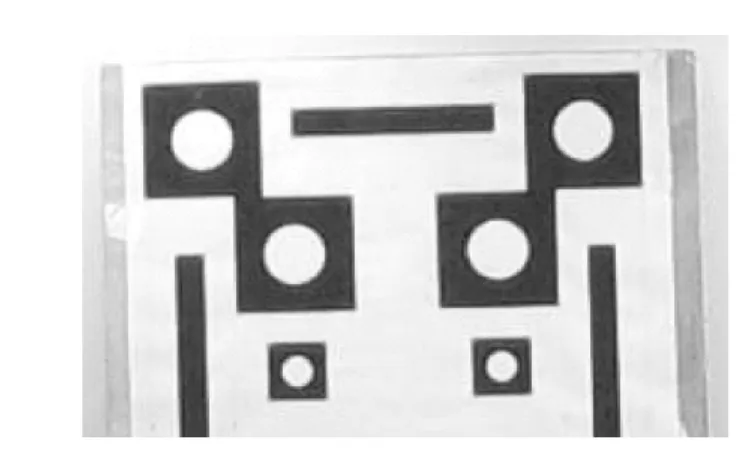
图5 测试标志板

图6 大小圆标志识别结果
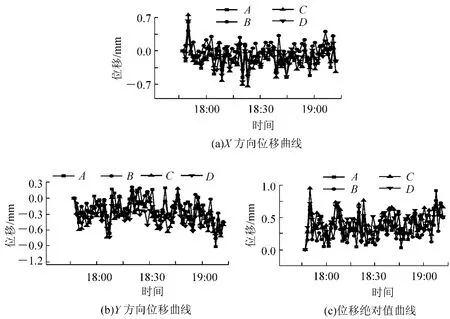
图7 各测点位移曲线
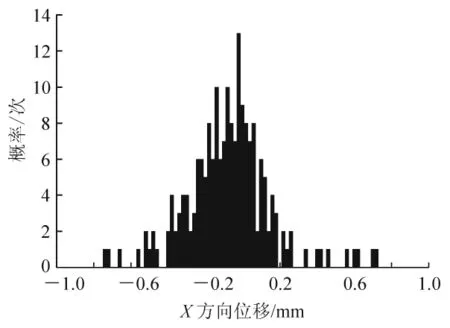
图8 X方向位移分布图
2 工程实例分析
现场试验选择在某在建隧道洞口边坡进行,该边坡为两级放坡,表面喷射混凝土进行加固,高约30 m,坡度约70°,相机拍摄距离为50 m左右。将现场试验用标志板制作为外方内圆的黑底白圆标志图像,黑色轮廓为200 mm×200 mm,中心白色标志圆直径为100 mm,将标志图像粘贴于表面平整的木板,于其侧面安设木棍使其能够插入泥土中固定。在边坡旁侧上安设测点。考虑该边坡分两级修建,将标志点分三级安置于边坡上,在边坡顶、底和中间台阶处分别安放,共安置9个标志点。
使用程序控制相机以一定时间间隔进行拍摄,识别各标志点位置,并绘制各标志点相对于第一次中心坐标位置识别结果的位移情况,如图9所示。由于测试时间仅持续了4 h,通过全站仪校核确定该时间段内各测点均无明显位移发生,而由标志点识别结果可见,各测点位移值均在上下波动,并且其位移绝对值最大达到3 mm。
由于现场有施工车辆经过,加上试验当天有较大自然风,相机和标志点均为临时安放,车辆震动和风动力对相机和标志点均有一定影响。上述原因造成现场误差较大。改进措施主要为:制作相机云台固定相机;标志点以钢铁制作混凝土基座深埋边坡中;选择更高精度相机;选择更合理的图像处理算法等。

图9 隧道各测点位移曲线
3 结论
提出一种基于非量测相机的边坡运营期监测技术,详细描述其实施过程,通过室内试验和现场试验确定其测量精度,并提出改进措施。证明了使用非量测相机借助无线数传终端等设备对边坡运营期变形测量实现远程监控,拍摄50 m距离精度在2~3 mm,自动化程度较高,实用高效,满足边坡运营监控要求。
[1]Ding X,Ren D,Montgomery B,et al.Automatic monitoring of slope deformations using geotechnical instruments[J].Journal of Surveying Engineering,2000,126(2):57-68.
[2]Angeli M G,Pasuto A,Silvano S.A critical review of landslide monitoring experiences[J].Engineering Geology,2000,55(3):133-147.
[3]王成亮.基于普通数码影像的近景摄影测量技术研究与应用[D].长沙:中南大学信息物理工程学院,2006.
[4]Ohnishi Y,Nishiyama S,Yano T,et al.A study of the application of digital photogrammetry to slope monitoring systems[J].International Journal of Rock Mechanics and Mining Sciences,2006,43(5):756-766.
[5]Ding Y,Shi B,Cui H L,et al.A fiber optic sensing net applied in slope monitoring based on Brillouin scattering[J].Yantu Gongcheng Xuebao/Chinese Journal of Geotechnical Engineering,2005,27(3):338-342.
[6]Chen F L,Lin S W.Subpixel Estimation of Circle Parameters Using Orthogonal Circular Detector[J].Computer Vision and Image Understanding,2000,78(2):206-221.
[7]黄劼,周肇飞,邓建清,等.基于圆拟合的孔系中心坐标高精度检测方法研究[J].工具技术,2004,38(04):47-49.
[8]黄桂平.圆形标志中心子像素定位方法的研究与实现[J].武汉大学学报:信息科学版,2005,30(5):388-391.
