基于Matlab的Hertz接触参数和主曲率差函数关系的拟合
2011-07-25刘胜超王东峰喻炜
刘胜超,王东峰,喻炜
(1.洛阳轴研科技股份有限公司 精密轴承制造部,河南 洛阳 471039;2.北京市三一重机有限公司,北京 102206)
符号说明
a—— 接触椭圆的长半轴
b—— 接触椭圆的短半轴
Dpw—— 球组节圆直径,mm
Dw—— 球径,mm
fi—— 内沟曲率系数
fe—— 外沟曲率系数
F(ρ)——主曲率差函数
Fa—— 轴向载荷,N
k—— 接触椭圆的椭圆率
K(e)——第一类椭圆积分
L(e)——第二类椭圆积分


Z—— 球数
ρ1Ⅰ——球在轴向平面的主曲率
ρ1Ⅱ——球在径向平面的主曲率
ρ2Ⅰ——套圈在轴向平面的主曲率
ρ2Ⅱ——套圈在径向平面的主曲率
α——初始接触角,(°)
φ——椭圆积分变量
γ——无量纲参数,γ=(Dw/Dpw)cosα
Hertz接触参数求解过程中,K(e),L(e)和k是由循环迭代的方法求得的,迭代次数非常多,每次迭代都需要求解K(e)和L(e),计算量大。这里利用Matlab曲线拟合工具箱,对K(e),L(e),k分别与F(ρ)进行拟合,得到它们和主曲率差函数F(ρ)的表达式,用拟合的结果求解给定型号轴承的其他Hertz接触参数,并与Hertz接触理论值以及最小二乘法线性回归法(回归法)得到的简化式[1]求得的结果进行对比。
1 Hertz接触参数
下面主要介绍与椭圆积分以及椭圆率计算相关的一些Hertz参数,其他参数不再赘述,可见文献[2-3]。
1.1 接触点的主曲率
在接触点,球与沟道表面的主曲率描述了球和沟道表面在接触点的几何特征,其影响到接触应力与变形及轴承动态性能[4]。球和沟道表面的主曲率计算方法见表1。

表1 球轴承接触点主曲率计算公式
主曲率差及主曲率和分别为
(1)
∑ρ=ρ1Ⅰ+ρ1Ⅱ+ρ2Ⅰ+ρ2Ⅱ。
(2)
1.2 椭圆积分
第一类完全椭圆积分为
(3)
第二类完全椭圆积分为
(4)
椭圆率为
k=b/a。
(5)
F(ρ)可以由K(e),L(e)和k表示为[5]
(6)
2 拟合法及回归法
Matlab中提供的曲线拟合工具箱(Curve Fit Toolbox)可以对工作空间中的2组参数的数据点进行拟合,根据不同的拟合规则得到2个参数的表达式。这里利用Matlab曲线拟合工具箱,对K(e),L(e)和k分别与主曲率差函数F(ρ)进行拟合,得到它们和主曲率差函数F(ρ)的表达式。
2.1 L(e)与F(ρ)的拟合
L(e)和F(ρ)的拟合曲线如图1所示。L(e)和F(ρ)的数据能用四次多项式很好地拟合出来,即
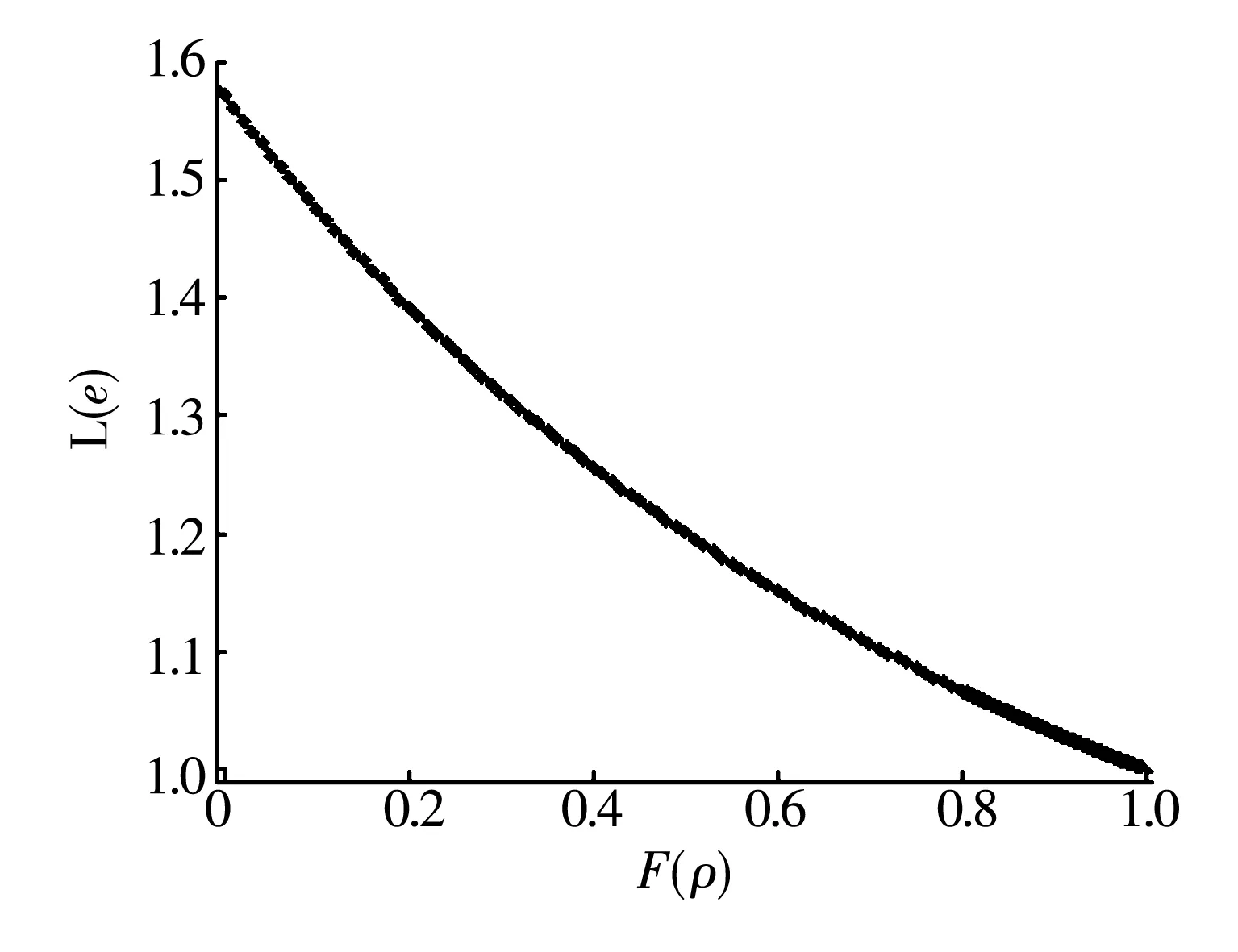
图1 L(e)和F(ρ)的拟合曲线
L(e)=0.131 8F4(ρ)-0.449 4F3(ρ)+0.783 4F2(ρ)-1.036F(ρ)+1.57,
(7)
L(e)随F(ρ)的增加而减小。
2.2 K(e),k与F(ρ)的拟合
由于K(e)和k用多项式进行拟合时的误差较大,采用三次样条插值拟合法分别对它们与F(ρ)进行拟合,拟合的曲线如图2、图3所示。K(e)随F(ρ)的增大而增大,且在F(ρ)趋近于1时趋于∞;k随F(ρ)的增大而减小,二者几乎呈线性关系。

图2 K(e)和F(ρ)的拟合曲线

图3 k和F(ρ)的拟合曲线
由于K(e),k与F(ρ)拟合的结果无法用简单的解析式表示出来, 因此将拟合结果保存至Matlab主工作区中KeFitted和kFitted两个mat文件,求解时,在主程序中调用这2个函数来计算K(e)和k。
2.3 回归法
由文献[1]知,由回归法求得的k,L(e)和K(e)的简化关系式为
(8)
(9)
(10)
3 实例分析结果


表2 球轴承参数
表3和表4分别给出了由拟合法和回归法得到的7208C/P4和B7019C/P4轴承的接触参数值,并比较了其与Hertz接触理论值的相对误差。结果显示,拟合法与Hertz接触理论值之间的误差更小,最大不超过0.6%;而回归法的最大误差将近1.8%。所以,拟合法不仅可行,而且更为准确。

表3 7208C/P4不同方法求得的接触参数值及相对误差

表4 B7019C/P4不同方法求得的接触参数值及相对误差
4 结束语
借助Matlab拟合出了椭圆积分、椭圆率与主曲率差函数的关系,用该拟合方法求解Hertz接触参数避免了大量的循环迭代过程,节省了计算时间,同时由该方法计算得到的参数值比回归法得到的参数值更为精确。
