时变时滞模糊系统的时滞反馈控制*
2011-07-24闫晓婷牛文生
郭 岗,闫晓婷,牛文生,朱 敏
(1.洛阳师范学院 信息技术学院,河南 洛阳 471022;2.中国航空计算技术研究所,陕西 西安 710068;3.西安通信学院 通信装备管理系,陕西 西安 710106)
时滞经常存在于许多实际系统中,它的存在常常会导致系统的不稳定和性能的下降,时滞可分为两类:时滞相关和时滞无关[1-9]。通常时滞相关较时滞无关有着较小的保守性。对于时变时滞模糊系统可用模型转换来处理[7],但它会导致结果的保守性。另外,上述成果大多数是基于单一的LKF[8-12]。单一的LKF要求所有的子系统要存在一个公共的正定对称矩阵,这样结果必然带来保守性。同时上述结果多是采用无记忆状态反馈[6-12],对于时滞系统而言,无记忆反馈可能会失去系统时滞信息,从而也带来保守性。
本文对一类带有时变时滞的模糊系统的稳定性分析和设计提出了一个新方法,这种方法较以前文献中所使用的方法具有更小的保守性。首先,定义一个新型模糊LKF,得到了开环系统的时滞相关稳定性条件。在推导过程中,引入多个模糊的自由权值矩阵来表示系统方程中各个项及Leibniz-Newton公式中各个项之间的关系。其次,使用了并行分布补偿算法,得到了闭环系统时滞相关的稳定性条件,并设计出了时滞控制器。
1 系统描述
考虑一个由T-S模型描述的非线性时滞系统,它的第i条规则可描述如下:

x(t)=φ(t),t∈[-τ,0]
i∈I:={1,2,…,s}
(1)

通过单点模糊化,乘积推理和中心平均反模糊化方法,模糊控制系统的总体模型为
Adix(t-d)+Biu(t))
(2)

2 模糊系统稳定性分析和时滞控制器设计
2.1 开环模糊系统稳定性分析
考虑开环系统
(3)

考虑选取如下的模糊LKF

(4)

引入模糊自由权值矩阵(5),并对V(x(t))求导可得式(6)
(5)
这里的Nki,Mki,Ski,Yki,i∈I,k=1,2,3,4是待求的合适维数的常数矩阵。
(6)

由于Ri>0,i=1,2可知(6)式最后三项都是非正项,那么可知如果

定理1 对于给定的标量τ和ρ,如果存在着矩阵P>0,Qi≥0,R1i>0,R2i>0及Nki,Mki,Ski,Yki,i∈I,k=1,2,3,4满足下列不等式
φlm1m2m3,ii<0l,m1,m2,m3,i,j∈I
(7)
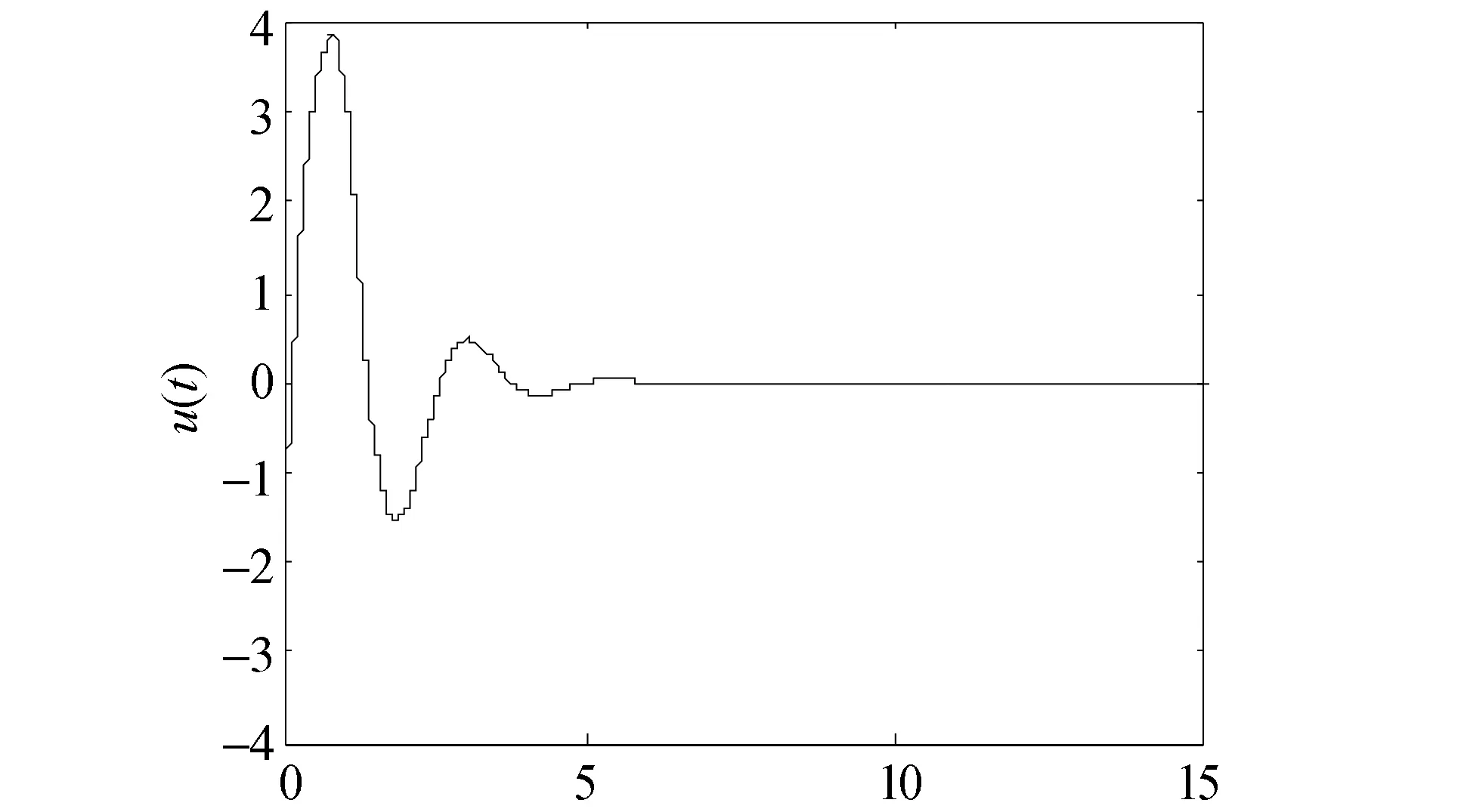
i (8) 则模糊系统(3)是渐近稳定的。 其中 证明对于系统(3),选取模糊LFK(4)。定义矩阵 s1∈[t-τ,t-d],s2∈[t-d,t],s3∈[t-τ,t] (9) 显然式(9)可表示为 由文献[12]可知:由( 7)和(8)式成立,则可保证 (10) 根据Schur补定理,式(10)可以等价于 所以可知开环系统(3)渐近稳定。 闭环系统可以表示为 (11) s1∈[t-τ,t-d],s2∈[t-d,t],s3∈[t-τ,t] (12) 其中 综上分析,根据定理1可知,闭环系统(11)是渐近稳定的。 其中 φlm1m2m3,ij= (13) 证明由Kj=GjZ-1,Kdj=GdjZ-1,则Gj=KjZ,Gdj=KdjZ,代入(13),可知 hm1(ξ(s1))hm2(ξ(s2))hm3(ξ(s3))· s1∈[t-τ,t-d],s2∈[t-d,t],s3∈[t-τ,t] 根据文献[14],闭环系统(11)渐近稳定。 考虑下面模糊系统[7]: Ri: ifx1isMi 选取τ=1,ρ=0,λ1=0.1,λ2=1.1,λ3=0.23,λ4=7.1,根据定理2可以得到时滞反馈控制器的增益为 图2 控制曲线 参考文献: [1]郭岗,牛文生,崔西宁,等.带有时变时滞的不确定模糊系统的鲁棒控制[J].华中科技大学学报,2009,37(11): 22-25. [2]郭岗,牛文生,崔西宁.时滞模糊系统的鲁棒非脆弱H∞控制[J].华中科技大学学报, 2009, 37 (12): 68-71. [3]郭岗,赵斌,牛文生,等.时变时滞模糊系统的稳定性分析[J].华中科技大学学报, 2010, 38 (7): 130-132. [4]张果,李俊民.不确定时滞模糊系统的时滞相关鲁棒H∞控制[J].中山大学学报:自然科学版, 2009, 48(1): 10-15. [5]赵立英,刘坤,刘贺平.具有两个时滞和的连续系统的时滞相关稳定性[J].中山大学学报:自然科学版, 2008, 47(1): 26-28. [6]CHEN B, LIU X P.Delay-dependent robust H-infinity control for T-S fuzzy systems with time delay [J].Fuzzy Sets and Systems, 2007, 158(20):2205-2224. [7]WU H N, LI H X.New approach to delay dependent stability analysis and stabilization for continuous-time fuzzy systems with time-varying delay [J].IEEE Trans Fuzzy Systems, 2007, 15 (3):482-493. [8]YONEYAMA J.Design of H-infinity control for fuzzy time-delay systems[J].Fuzzy Sets Syst, 2005, 151: 167-109. [9]CHEN B, LIU X P.Fuzzy guaranteed cost control for nonlinear systems with time-varying delay [J].IEEE Trans Fuzzy Systems, 2005, 13 (2):238-249. [10]HE Y, WANG Q G, LIN C, et al.Delay-range-dependent stability for systems with time-varying delay [J].Automatica, 2007,43(2): 371-376. [11]ZHOU S S, LAM J, ZHENG W X.Control design for fuzzy systems based on relaxed nonquadratic stability and H-infinity performance conditions [J].IEEE Trans Fuzzy Syst, 2007,15(2):188-198. [12]TUAN H D, APKARIAN P,NARIKIYO T,et al.Parameterized linear matrix inequality techniques in fuzzy control system design [J].IEEE Trans Fuzzy Systems, 2001, 9(2):324-332.2.2 模糊控制器的设计






3 数值仿真