关联大系统的静态输出反馈控制*
2011-07-24牛文生崔西宁
郭 岗,牛文生,崔西宁,朱 敏
(1. 洛阳师范学院信息技术学院,河南 洛阳 471022;2. 中国航空计算技术研究所,陕西 西安 710068;3. 西安通信学院,陕西 西安 710106)
基于T-S模型的模糊控制是研究非线性系统比较成功的方法之一,在非线性关联大系统的分散控制方面,已有不少成果面世[1-6]。但这些文献中T-S模型的模糊规则的后件部分都是一个线性模型。对于一些非线性系统,当用线性模型不能描述时,往往可以用双线性模型来描述。考虑T-S模型的有效性和双线性系统的特点,基于T-S双线性模型的模糊控制就引起了学者的关注。和常见的T-S模糊模型不同,模糊双线性控制系统模糊规则的后件部分是一个双线性模型。目前,在对双线性模糊控制的研究中,控制器大都是关于状态反馈的,关于静态输出反馈控制的结果则很少[7-10]。静态输出反馈控制直接利用系统的输出量来设计控制器,不用考虑系统状态是否可观测,而且静态输出反馈控制器结构简单,具有良好的应用价值。
本文研究了一类模糊双线性关联大系统的静态输出反馈控制问题。基于Lyapunov稳定性理论,得到了关联大系统渐近稳定的充分条件,并把这种条件转换成线性矩阵不等式(LMI)形式,相应的分散模糊控制器可以通过求解LMI得到。这种方法简化了设计程序,并由数例仿真验证了结果的有效性。
1 系统描述
一类由s个子系统组成的模糊双线性关联大系统,通过单点模糊化,乘积推理和中心平均反模糊化方法,可得系统的总体模型为
i=1,2,…,s,m=1,2,…,ri
(1)

根据并行分布补偿算法,考虑局部反馈控制器

then
ρisinθim=ρicosθimFimyi(t)
(2)

(3)
在控制律(3)的作用下,整个闭环系统的方程可表示为
(4)
这里Λi,mnl=Aim+ρisinθinNim+ρicosθinBimKinCil。
本文目标:对于由s个子系统组成的模糊关联大系统,对每一个子系统设计局部静态输出反馈控制器,使得闭环关联大系统(4)渐近稳定。
2 主要结论
定理1 对于给定的常数ρi>0,εi>0,如果存在矩阵Zi>0,和矩阵Fin,n=1,2,…,ri满足矩阵不等式(5),则关联大系统(4)是渐近稳定的。
Φi,mnl=
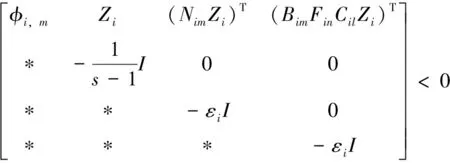
(5)

证明考虑选取如下Lyapunov函数
(6)

沿着系统(4)的轨线,对V(t)求导,可得到
(7)
考虑下式,并由文[11]中引理可知
(8)
同样考虑下式,并由文[11]中引理可得到
(9)
把(8)式、(9)式代入(7)式,可得到
(10)
这里
对定理1中的(5)式同时左、右乘diag{Pi,I,I,I},则可得到
(11)
考虑(5)式是双线性矩阵不等式(BMI),不能直接用Matlab中的LMI工具箱求解。为求解控制器,下面提出一个新的方法把BMI转换成LMI形式。

(12)
证明考虑
φi,mnl=
假设有Φi,mnl+φi,mnl<0,则可以得出Φi,mnl<0。考虑
Φi,mnl+φi,mnl=
由Schur补定理可知,(12)式等价于Φi,mnl+φi,mnl<0,进一步可以得Φi,mnl<0。根据定理1,则可知在静态输出反馈器下,闭环系统(4)是渐近稳定的。
3 算例分析
考虑2个子系统复合而成的不确定模糊双线性关联大系统。
Subsystem 1:
B11u1(t)+D211x2(t),
y1(t)=C11x1(t);
B12u1(t)+D212x2(t),
y1(t)=C12x1(t);
Subsystem 2:
B21u2(t)+D121x1(t),
y2(t)=C21x2(t);
B22u2(t) +D122x1(t),
y2(t)=C22x2(t),其中

K11=[-1.067 1];K12=[-0.562 8];
K21=[-1.208 3];K22=[-1.623 9]
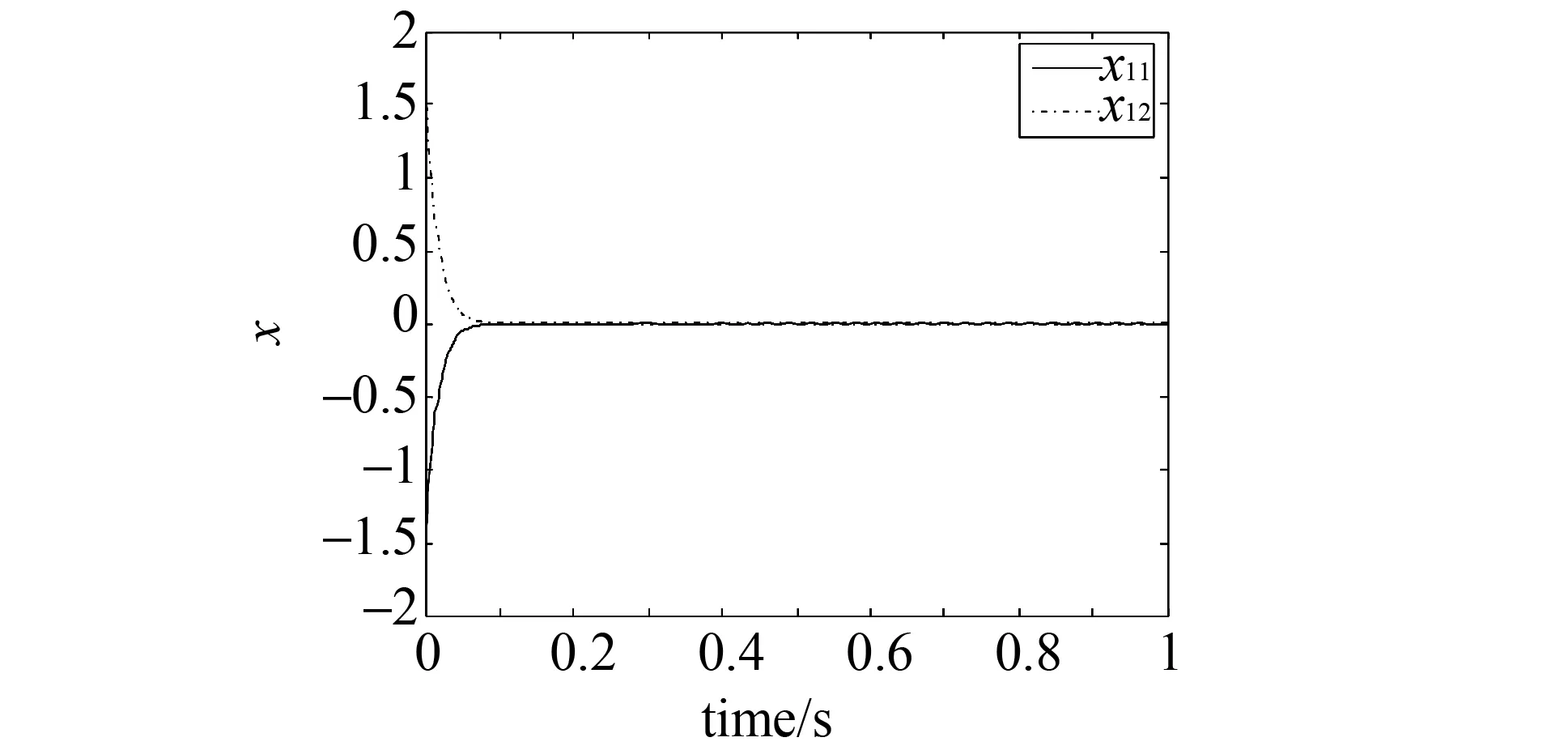
图1 子系统1的状态响应曲线

图2 子系统2的状态响应曲线
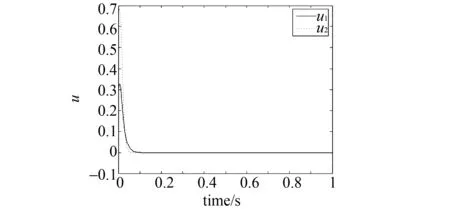
图3 控制曲线
参考文献:
[1] WANG W J, LUOCH L. Stability and stabilization of fuzzy large-scale systems[J]. IEEE Trans Fuzzy Syst, 2004, 12(3): 309-315.
[2] CHEN C W, CHIANG W L, HISAO F F. Stability analysis of T-S fuzzy models for nonlinear multiple time-delay interconnected systems[J]. Mathematics and Computers in Simulation, 2004, 66(6): 523-537.
[3] 张果,李俊民. 不确定时滞模糊系统的时滞相关鲁棒H∞控制[J]. 中山大学学报:自然科学版, 2009, 48(1): 10-15.
[4] 赵立英,刘坤,刘贺平. 具有两个时滞和的连续系统的时滞相关稳定性[J]. 中山大学学报:自然科学版, 2008, 47(1): 26-28.
[5] 郭岗,王子须,牛文生,等.基于T-S双线性模型的非线性关联大系统的分散控制[J].武汉大学学报:工学版,2010,43(4):541-544.
[6] 郭岗,赵斌,牛文生,等.时变时滞模糊系统的稳定性分析[J].华中科技大学学报:自然科学版,2010,38(7):130-132.
[7] LI T H S, TSAI S H. T-S fuzzy bilinear model and fuzzy controller design for a class of nonlinear systems[J]. IEEE Trans Fuzzy Syst, 2007, 15(3): 494-505.
[8] TSAI S H, LI T H S. Robust fuzzy control of a class of fuzzy bilinear systems with time-delay[J]. Chaos Solitons and Fractals, 2009, 39(5): 2028-2040.
[9] LI T H S, TSAI S H, LEE J Z, et al. Robust H∞fuzzy control for a class of uncertain discrete fuzzy bilinear systems[J]. IEEE Trans Syst, Man Cybe, 2008, 38(2) : 510-526.
[10] KAU S W, LEE H J, YANG C M, et al. Robust H∞fuzzy static output feedback control of T-S fuzzy systems with parametric uncertainties[J]. Fuzzy Sets and Syst, 2007, 158:135-146.
[11] WANG R J, LIN W W, WANG W J. Stabilizability of linear quadratic state feedback for uncertain fuzzy time-delay systems[J]. IEEE Trans Syst Man Cybe, 2004, 34(2): 1288-1292.
