大型船舶靠离泊操纵中拖轮助操的分析
2011-07-20耿志兵
耿志兵
(武汉理工大学航运学院,湖北武汉 430063)
在大型船舶靠离泊过程中,由于码头前沿水域平面条件和水深条件的限制以及大型船舶载重质量大、吃水深、尺度大、惯性大、冲程大,受风流的影响大、运动状态不易控制等特点,使得大型船舶在靠离泊操纵时必须配备足够数量或功率的拖轮协助船舶操纵,并且操作方法必须合理有效,以确保码头以及大型船舶靠离泊操纵的安全。但是,目前国内各港口对于大型船舶拖轮的配备和协调联系方法没有统一的规定,各自都是按照自己的习惯做法配备和联系拖轮。[1]
本文结合“木兰湾石英砂及海洋地质调查补给码头通航安全评估模拟试验”课题项目,运用大型船舶操纵模拟器对大型船舶靠离泊操纵作业中拖轮助操方法进行了分析和探讨。
1 大型船舶靠离泊操纵拖轮助操方法[2]
(1)尾拖制动。由于大型船舶质量较大,一般带缆位置在大船的船尾正中,由全回转拖轮的船头出缆。放缆长度应超过被拖缆出口至水面高度的4倍。操纵经验表明,当大船的船速达到6kn以上时,拖轮如果全速倒车将对拖轮造成严重的后果。因此当大船的船速达到6kn或以上时拖轮只能采用低速,这需要较长的制动时间并冲过较长的制动航程。因此用拖轮制动只能在大船低速时有很好的效果。
(2)吊拖:吊拖又称直拖。由大船的船头出缆系于拖轮的尾部拖钩上。这是拖带无动力大船的主要工作方式。吊拖最大的问题容易使拖轮出现“倒拖”现象。这需要大船的操纵者在作业中给予足够的重视。
(3)顶推:即在大船外舷前后适当的位置系缆,从旋回转拖轮的船头出缆既可以顶又可以拖的工作方式。这是拖轮在港内协助大船靠离泊时的主要操纵方式。
(4)傍拖:这是拖轮船首向偏于内侧傍靠在大船舷边的拖带方式。拖轮既可作为动力船也可起到一定的舵的作用。傍拖时,拖轮除了带头缆和尾拖之外还应带走缆,三根拖绳的强度应足够大,应保证用拖轮倒车进车及转舵时缆绳的受力。这种方式对小型船舶非常有效,对大型船的作用不大。
2 大型船舶靠离泊操纵中拖轮助操的模拟仿真
2.1 拖轮协助下靠泊
本工程中进港的20000DW T散货船基本为压载状态受风的影响较大,选取在风速较小时进行作业,拖轮配备根据计算值选取一艘2500匹马力的全回旋拖轮,选取涨潮东北风为例说明实际的靠泊过程,见图1。
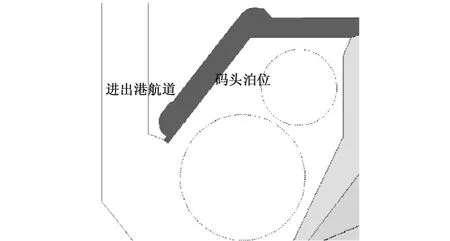
图1 木兰湾石英砂码头模拟仿真图
(1)船舶进入到进出港航道后,需要根据实际的距离控制船舶速度并在合适的地方带妥拖轮,模拟试验在离防波堤口门大约1海里处速度降至5kn左右并带妥拖轮,因为船舶压载进港受风影响较大,而且进港转向角度较大,故拖轮需要在船首顶推协助转向,如图2所示。
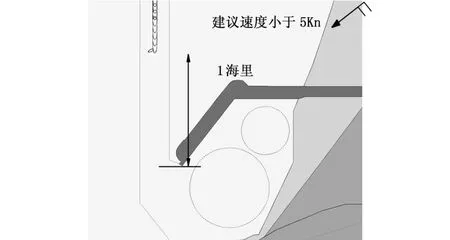
图2 靠泊过程示意图
(2)船舶慢速进港时,在防波堤口门前开始操舵转向,此时可以根据当时风流情况来确定拖轮是否需要慢车顶推大船船首。如图3所示。
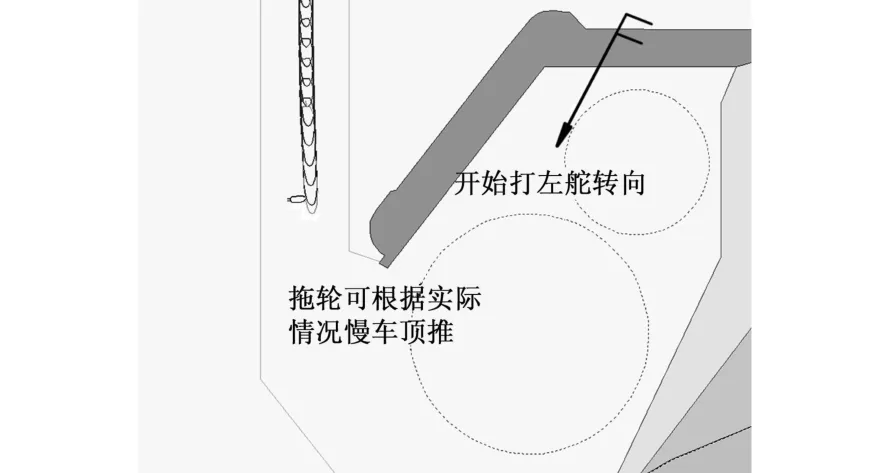
图3 靠泊过程示意图
(3)拖轮作用下摆正船位
船舶继续左舵转向,此时船舶速度应该进一步降低至大约2-3kn左右,进一步控制船位,在船舶转向大约40左右时,此时船位离防波堤大约一倍船长时,可以停车,船首拖轮全速顶推,使得船舶继续转向,如图4所示。
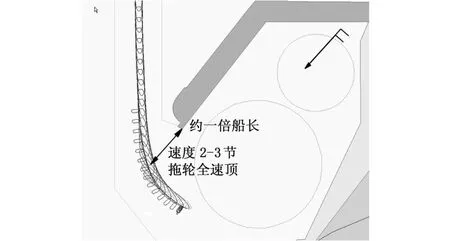
图4 靠泊过程示意图
(4)当船舶航线转至90°时,此时船舶已经获得了一定的转向惯性,船首拖轮可以开托,利用剩余惯性继续转向,拖轮可以换位在船中顶推,使得船舶向靠近码头方向横向移动。如图5所示。
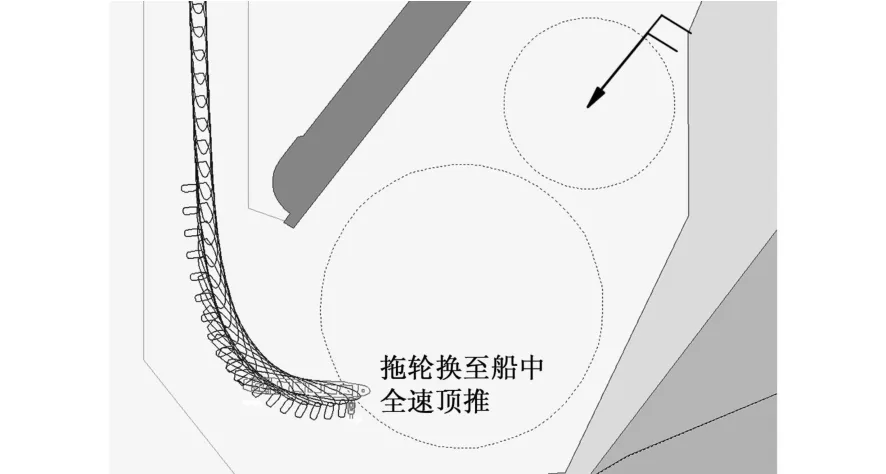
图5 靠泊过程示意图
(5)拖轮转至船中后继续顶推,需要根据当时的风况来进一步调整顶推功率,直至船舶获得合适的横移速度。当船舶快接近码头,离码头大约一倍船长处时需要注意进一步利用车舵来调整船位,使得船舶与码头基本平行以减小靠泊角度,同时注意控制余速与船舶横向移动的速度,使得船舶安全入泊,如图6所示。
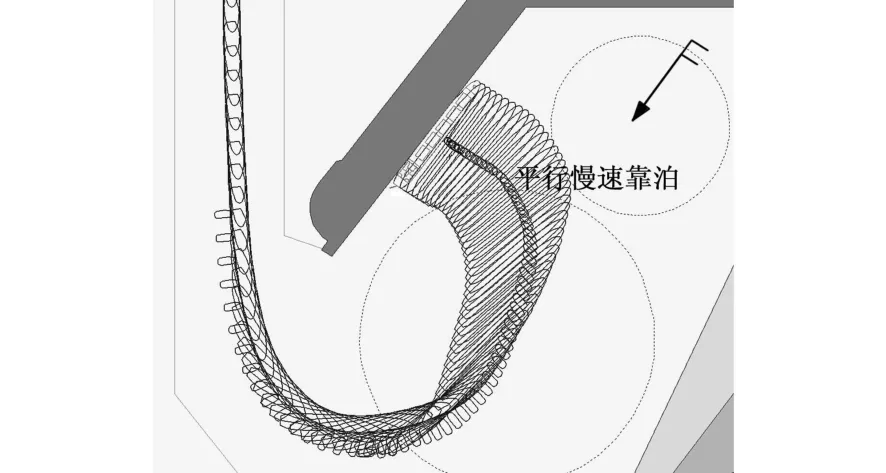
图6 靠泊过程示意图
2.2 拖轮协助下驶离操作方法
出港的20000DW T散货船基本为满载状态受流的影响较大,选取在涨潮最大前流速较小时进行作业,拖轮配备根据计算值选取一艘2500匹马力的全回旋拖轮,选取涨潮东南风为例说明实际的离泊过程。
(1)首先单绑,因为方向为东南风,故在单绑之前应该先带妥拖轮,并根据风力的大小调整拖轮马力,使得船舶不至于由于风力作用而与码头发生碰撞,所有缆绳解除之后迅速加大拖轮的马力,使船舶快速平行离开码头,如图7所示。
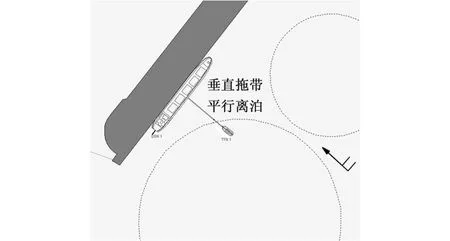
图7 离泊过程示意图
(2)在拖轮平拖的过程中,根据风流情况船舶适当开出倒车,使得船舶在平拖离开码头的过程中慢速向后移动,获取旋回的有利船位,如图8所示。
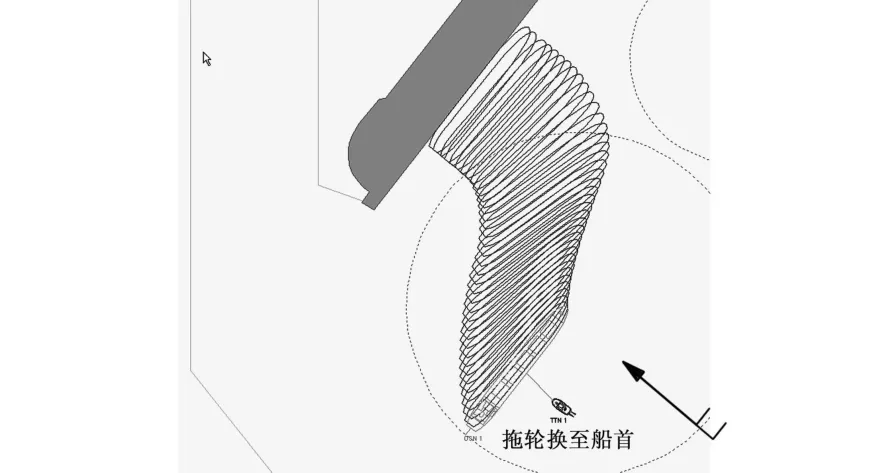
图8 离泊过程示意图
(3)当船舶后退至接近旋回区域边缘时,迅速停车。此时,将船中拖带的拖轮换至船首顶推,使得船舶快速转向,如图9所示。

图9 离泊过程示意图
(4)当船舶有一定的向右转向的角速度后,把船首的顶推拖轮换到船中位置,全速顶推,并微车前进,如图10所示。
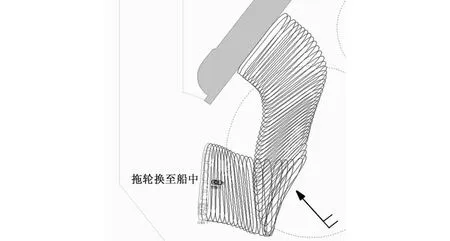
图10 离泊过程示意图
(5)继续顶推船舶向右运动,当接近航道边缘时,顶推拖轮根据环境情况马力减小或停止顶推,并有微车前进马力加大,迅速进入航道通过防波堤口门,如图11所示。

图11 离泊过程示意图
3 结 语
港口持续稳定的发展是沿海地区经济繁荣的基本保证.当前,各沿海城市的港口建设规模正日益扩大,新建了许多大型船舶靠泊码头,本文根据大型船舶操纵运动的特性,给出了大型船舶靠离泊操纵中拖轮具体的助操作方法。在此基础上,运用大型船舶操纵模拟器,根据码头所在地理位置、水文气象条件,利用拖轮协助操纵,对20000 t级大型散货船舶靠离泊操纵中拖轮应用进行多次实时动态仿真试验,并在对仿真试验的结果进行优化分析的基础上,得出所需的可行性方案,该方案对船长、引航员实际操船具有参考价值,为港口建设和超大型船舶的靠离泊问题的解决提供了科学的依据。
