传感器自适应遥测终端在中小型水库中的应用
2011-07-16吴永新陈宇骁
刘 伟 ,吴永新 ,陈宇骁
(1.水利部南京水利水文自动化研究所,江苏 南京 210012;2.南京市水利局,江苏 南京 210018;3.河海大学计算机与信息学院(常州),江苏 常州 213022)
0 引言
中小型水库的水文测验和安全防护关系着下游的安全和周边城乡的发展,对水资源的需求和防汛安全要求逐渐提高。利用中小型水库信息采集传输关键技术,实现中小型水库防汛和安全监测自动化采集传输并进行分析评估,便于防汛抗旱指挥和其他部门应急决策、指挥、调度,利用科技手段,提高水库管理水平,最大程度避免损失和在安全状态下充分利用水资源。
国内大部分中小型水库没有防汛信息采集技术设施,水库建设时亦没有同步建设水位测井。目前不可能重新建设水位测井,因此,传感器不能采用常规的浮子式水位传感器完成水位监测。通过引进消化吸收德国免测井水文测验技术,解决中小型水库水文专项测验问题,是一种有益的尝试。通过消化吸收应用,开发出针对我国中小型水库特点的水文监测处理技术,推动了国内中小型水库水文自动监测和管理水平的发展。
目前市场上的水情遥测终端只能适应固定的传感器,如果要更换传感器必须要更换相应的终端程序,或者通过软件对终端机进行设置,给开发和安装维护人员带来了不便。传感器自适应水情遥测终端机则弥补了这方面的不足。
1 遥测终端机自适应设计
1.1 串口通信
水情传感器设备种类繁多,形式各异。测量水位的传感器通讯方式也多种多样,串行通信由于实现简单,需要的系统硬件资源较少,在水情遥测系统中得到了广泛的应用。串行通信接口(SCI)中最常用的有 RS-232、RS-485 和 SDI-12 通信接口。
串行通信接口的传感器在与遥测终端机通信的过程中,波特率和通讯协议随设备不同而异。要设计具有自适应能力的遥测终端机,首先要对传感器进行智能识别。经过对大量串行通讯的传感器进行分析,得出传感器识别主要在于波特率和握手通信的差异。通过建立通信协议栈,根据传感器的 ID 号调用不同的通讯协议程序,能实现对传感器的自动调用。
1.2 波特率自适应
在通信过程中,只有通信双方采用相同的波特率时,才能实现数据的正确传输,这给串行通信传感器的使用带来不便,特别是对于波特率变化的情况[1]。如果能够实现串行接口速率的自适应,无疑会提高串行传感器使用的灵活性和通用性。
波特率自适应的常用方法主要有标准波特率穷举法和码元宽度实时检验法[2]。标准波特率穷举法要求数据终端传输数据所采用的波特率必须在有限的几个固定数值之间变化,如标准波特率序列。串行设备启动后,逐个尝试以不同的波特率接收数据终端发出的特征字符,直到能正确接收为止。码元宽度实时检测法要求数据终端按照约定发送特征字符,串行设备测量输入数据的码元宽度,而后计算出待测的波特率。例如,某 GSM 模块在设计时为了适应各种波特率,要求通信系统首先发送 08H,然后发送指令,它就是依靠数据 08H 的码元宽度计算出对方波特率的。波特率穷举法适应于波特率在几个有限的固定数值的变化,并且从机的工作振荡频率稳定可靠。由于水情传感器的波特率比较固定,集中在 1200,4800,9600,12000 bps 等,且工作稳定可靠;而码元宽度实时检测法需要占用单片机过多资源。因此本文采用标准波特率穷举法,待遥测终端机启动通信程序后,逐个尝试用不同的波特率接受传感器发送的数据,直到能正确接收为止。
1.3 多传感器握手通信
每种水文传感器会提供大量通信协议指令,以提供给用户使用不同的功能,如对传感器的波特率、长度、地址进行设置或者访问水文测值等。在对传感器进行识别时,无须一一使用这些通信协议,只需要从传感器的通信协议中,取出握手协议,得出传感器特征即可。
1.3.1 感应式数字水位传感器
感应式数字水位传感器是一种采用微处理器芯片为控制器,内置通讯电路的数字式水位传感器,具备高可靠性及抗干扰性能,可应用于江河、湖泊、水库、水电站、灌区及输水等水利工程中的水位监测。通讯协议采用 Modbus-RTU 标准协议,波特率为 9600 bps,1 个起始位,8 个数据位,1 个停止位,低位先发送,无校验。有 4 种命令格式,使用命令如表1 所示[3]。
由于传感器的地址、长度的信息未知,分析 4种命令格式,可以将读版本号作为握手协议[3]。读版本号的通信命令格式:目标地址 + 功能码 + 起始地址 + 寄存器个数 + CRC 校验。地址未知,可采用广播帧的方式,即目标地址发送 00。发送 0003 0003 0001 75 DB,响应:0A 030E 5633 2E 302E 3320 5443 3430 312D 33 CRC(本响应共 18 字节)。0A 表述传感器的地址为 10 号,030E 5633 2E 302E 3320 5443 3430 312D 33 表示传感器的版本号为V3.0.3 TC401-3。传感器的地址是可以设置的,但是版本号是固定不变的,可以根据回执中的版本号信息来判定传感器是否为感应式数字水位计。
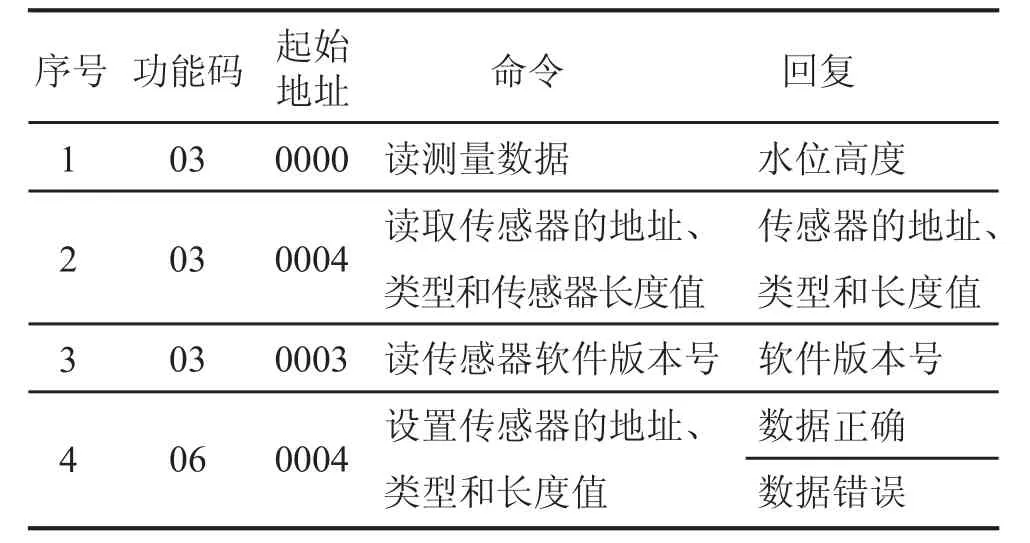
表1 感应式数字水位传感器使用命令一览表
1.3.2 气泡水位计
PS-Light 系列气泡水位计为高精度水位传感器,主要用于水文站水位观测点不便建井或者建井费用昂贵的地点。它具有安装、维护方便,操作灵活,运行稳定、可靠、精度高等特点,是遥测系统中水位监测尤其是无井水位监测的理想水位监测仪器。它的输出信号为 RS-232,通过遥测终端机RS-232 口获取水位计采集的信息[4]。其通讯协议如图1 所示。
PS-Light2 协议本身比较复杂,如果等待气泡水位计测量到水位,需要的时间比较长,而唤醒命令只需要等待 1 s 的时间,因此可以将唤醒命令作为握手通信协议。而仪器的波特率是未知的,因此就要用到波特率自适应程序,波特率自适应程序首先使用常用的波特率 9600 bps,然后使用 19200 bps,其次使用 1200 bps,再将其它常用的波特率进行轮询使用。具体步骤如下:1)总线电源开启,将串行口中的 DTR 引脚置高电平; 2)发送广播信息帧,即发送 0xF002 命令;3)等待 1 s 的时间;4)调用波特率自适应程序,发送读信道数命令码 0x504A;5)轮询等待应答信号,得到气泡水位计的波特率[5]。
1.3.3 雷达水位计
OTT RLS 雷达液位计是一种非接触式水位测量仪,是测量地表水位的新型测量设备,不受温度等外界环境影响,在水文野外测量中具有很多优点。该传感器设计紧凑,安装方便,免维护。因不与水面接触,在测量中不受淤泥、水上垃圾等因素的影响,使用该仪器不需建测井,通过内置软件自动修正波浪影响。
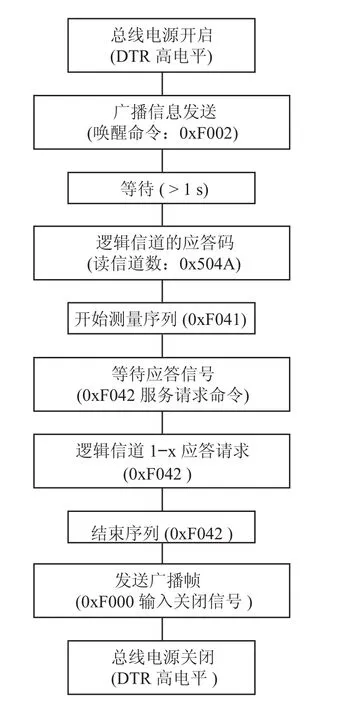
图1 PS-Light2通信协议
OTT RLS 供电电压为 12 V,非工作状态时能自动进入低功耗状态,采用 SDI-12 通信协议。SDI-12是一种标准的接口方式,它提供了连接数据采集器和智能传感器的方法。SDI-12 通信协议采样 3 线制,包括 +12 V 电源线、数据线和地线。
SDI-12 支持的传感器与记录器之间的通讯是依靠在数据线上互相交换美国标准信息交换 ASCII 来实现的。SDI-12 的波特率设定为 1200 bps。1 个字节 (1 帧) 由 10 个二进制位组成:1 个起始位(第 1 位),7 个字符编码位,1 个偶校验位 (第 9 位)和 1 个停止位[6]。
其典型的测量步骤如下:
1)主机发中断命令,内容是: break 和 mark信号。其中,break 信号是持续至少 12.00 ms 的空号信号;然后是持续 8.33 ms(允许误差 -0.4 ms)的 mark 信号。
2)主机设备向指定地址的传感器发送命令, 指示它进行测量。
3)该地址传感器在 15 ms 内做出应答,返回测量数据所需的最大时间和将要返回的数据的数目。
4)如果测量结果立即可以得到,则记录设备给传感器发送命令,指令它传回测量结果;如果测量结果未准备好,则数据记录设备等待传感器发出请求,这个请求表明数据已准备好,然后记录设备传送命令取数据。
5)传感器应答,返回 1 个或多个测量结果。
OTT RLS 产品手册提供了很多命令接口以供用户使用,根据自适应设计只需要提取其中的握手通讯协议即可。本例中使用激活 OTT RLS 命令 A!(A表示设备地址)。具体过程如下:1)将遥测终端机的串口 RS-485 定义为普通 IO 口;2)置 TXD(串口发送引脚)高电平,并保持 12.00 ms;3)置 TXD 低电平,并保持 8.33 ms;4)遥测终端机串口波特率设置为 1200 bps,并发送激活命令 0! (0 表示广播地址);5)接受回执,并判断回执是否正确。
每增加 1 种传感器就需要多增加 1 段传感器识别程序,并添加到通信协议栈。在传感器接到遥测终端机的时刻,利用传感器的触发信号,调用协议栈中相应的识别程序,识别到正确的传感器特征后,系统自动进入采集和发送数据状态,不再调用协议栈中的其他通信程序,因此无需占用过多的系统资源。
2 自适应遥测终端机的应用
中小型水库遥测系统的功能需求主要有以下几点:
1)正确接收 1 次所属全部水库报汛站的遥测数据,完成数据采集、传输、处理、入库的时间不超过 5 min,并能及时向区县分发,提供水库水情信息服务。
2)系统通信采用 GPRS 和 GSM 自报方式。
3)采集传输设备符合结构简单、可靠、低功耗的原则,所有遥测站都在无人值守的条件下工作。系统能长期地,特别是在暴雨洪水等恶劣天气条件下可靠地工作,具有较强的抵御外部干扰的手段。
在中小水库遥测系统采用自适应遥测终端机,可满足以上需求。
采用自适应遥测终端机的中小型水库遥测系统已于 2011 年 2 月应用于948 项目:南京市江宁区中小型水库信息采集传输关键技术中,目前运行正常。项目分别在赵村、东焦、安基山、汤泉、泗陇、牌坊等水库设置信息采集站点。采用免建井气泡和雷达水位计作为水文传感器,提供了大量的现场水文数据,在水文极值和遇险参数出现时自动报警,保障中小水库安全运行。将从中心站获取的赵村水库 2011 年 5 月的部分早 8 点数据与人工测试数据进行对比,对比结果如表2 所示。
由表2 可以看出,误差范围保持在 ±1 cm 之间,属于正常误差范围。证明该系统中的自适应遥测终端能够稳定采集实时正确的数据,可以在野外应用。

表2 自报数据与实测数据对比表cm
3 结语
自适应遥测终端应用于中小型水库信息采集系统中,将波特率自适应和自举协议技术应用于水文传感器的识别上,增强了系统的灵活性。本文列举的数字感应式传感器,气泡式和雷达水位计适应于国内很多中小型水库应用。终端机在设计时,尽量先使用常用的波特率和应答时间较短的通信协议,以减少系统的识别时间,增强芯片使用的效率,从而使得遥测设备具有简单的,无须人工干预的智能化调解的功能。另外如果系统增加其他传感器,则可将其他传感器的识别程序集中在同一协议栈中,增加识别不同的传感器,增强系统的可扩展性。
[1]王宜怀,刘晓升. 嵌入式应用技术基础教程[M]. 北京:清华大学出版社,2007 (11): 138-139.
[2]潘育山,靳桅,邬芝权. 单片机串行通信波特率的自适应实现方法[J]. 现代电子技术,2003 (24): 58-60.
[3]太原理工天成科技股份有限公司. TC401 感应式数字水位传感器用户手册[S]. 太原:太原理工天成科技股份有限公司,2009: 6-8.
[4]SEBA_PS-Light2 [S]. SEBA .2007:3
[5]SEBA_PS-LIGHT-2_Sensor_SHWP_Protocol [S].Ma/Cs,den 2010:16.
[6]SDI-12(EN). SDI-12 Support Group [S]. 2005: 1-12.