基于图像识别的水下地形冲刷过程监测
2011-07-12孙东坡张先起王鹏涛
孙东坡,谢 锋,张先起,王鹏涛
(1.华北水利水电学院,河南 郑州 450011;2.河海大学,江苏 南京 210098)
河流在自然状况或修建工程情况下的河势变化及局部河床变形,经常需要采用河工模型试验来确定,需要在实验室内观测工程附近水下地形的变化及河床变形过程[1].为了准确得到河工模型试验中河道地形或建筑物附近河床冲淤变化,尤其是局部河床冲淤随时间的变化,需要对水下地形信息进行实时、动态的测量和分析[2].
随着计算机及图像技术、光学技术、超声波技术和激光技术的发展,国内外开发了多种测量仪器用于对河工模型地形的测量,如光电反射式地形仪[3]、电阻式地形仪、跟踪地形仪、超声地形仪、激光扫描仪等仪器[4]及近景摄影测量技术[5].阻抗地形仪和光电地形仪精度相对较高、应用较广泛,但这类接触式地形仪会破坏局部地形,影响测量精度[6].超声地形仪是非接触式的,测速快,但精度不高,多应用于实际工程测量[7].激光测距传感器测量精度高,测量速度快,但价格较昂贵.根据水下地形冲刷过程监测的特点,即测量设施为非接触式、测量速度快、测量精度需满足需求,本文提出以图像识别为基础,借助线激光为参照线的一种新型水下地形监测与分析方法;研发了一种既不干扰河床地形、又保证测量速度及精度,可以在河工模型试验局部冲刷观测中方便使用的监测系统.经实际应用,该方法简单易行,对提高河工模型量测技术具有一定的参考价值.
1 监测系统的建立
1.1 基本思路
通过线激光在水下地形上照射出一条轮廓线,由摄像头捕获该时刻图像信息,再通过图像识别技术获取该时刻的水下地形轮廓线.当线激光完成对整个水下地形的照射后,就可以获得完整的水下地形.反复地逐行(列)扫描就能实现对水下地形的实时监测(见图1).

图1 监测系统示意图Fig.1 Monitoring system
1.2 监测系统的主要构成
激光与普通光相比具有三好一高的特点:单色性好、相干性好、方向性好和亮度高[8].由于激光定向性好、使用方便、易于安装和稳定可靠,能较大幅度提高工作效率,因此激光被广泛应用于医疗、军事、测量仪器等产品中.地形测量通常使用635 nm的红色激光,因为红色较为醒目,特殊情况也可选择532 nm绿色激光.系统测量范围的宽度就是激光的线宽宽度,测量范围的长度是与水流流速有关的函数;经过试验得知,测量范围的长度以激光线宽的2倍为宜.根据实际模型尺寸确定选用的激光器参数见表1.

表1 激光器参数Tab.1 Laser parameters

图2 误差分析曲线(分辨率)Fig.2 Error analysis curve(resolution)
摄像头的成像质量对地形数据的识别影响很大,不同分辨率的摄像设备对系统的误差依存关系如图2所示.通过对不同分辨率的比较分析,从精度与经济两方面考虑,相对误差控制在15%左右较为合适,所以监测系统选用工业级摄像头(SONICA SCC-380 COLOR CCD CAMERA).
1.3 基于MATLAB的图像识别
通过动态监测系统图像获取模块获得的是视频文件(通常为AVI格式),MATLAB通过对监测视频的每一帧图像进行识别处理[9],从而完成水下地形的重现.在获得图像后,首先要对图像增强,即根据某种应用需要,人为地突出输入图像中的某些信息,从而抑制或消除另一些信息的处理过程[10].根据增强处理过程所在的空间不同,图像增强技术可分成频率域法和空间域法[11].
频率域法把图像看成一种二维信号,对其进行基于二维傅里叶变换的信号增强,其主要有低通滤波法和高通滤波法.采用低通滤波法(即只让低频信号通过),可去掉图中的噪声;采用高通滤波法,则可增强边缘等高频信号,使模糊的图片变得清晰,在MATLAB中可以使用fir1()函数设计出低通、高通滤波器.
空间域法则直接对图像灰度级做基于频域的运算,即在图像的某种变换域内对图像的变换系数值进行某种修正,是一种间接增强的算法,具体可通过点运算或邻域增强算法实现.点运算算法即灰度级校正、灰度变换和直方图修正等,目的使图像成像均匀、扩大图像动态范围及扩展对比度等.在MATLAB中,灰度调整可以用imadjust()函数,直方图均衡化使用histeq()函数.邻域增强算法有图像平滑和锐化两种.平滑技术用于平滑图像中的噪声,基本应用在求空间域上的平均值或中值,或在频域上采取低通滤波;在MATLAB中,以用smooth()函数实现图像平滑.锐化技术采用的是频域上的高通滤波法,通过增强高频成分减少图像中的模糊,特别是使模糊的边缘部分得到了增强,但同时也放大了图像的噪声.在MATLAB中可以采用Robert梯度算子和Laplacian算子对应的模板对图像进行锐化.
通过线激光辅助获取的水下地形轮廓线,MATLAB图像识别后是一个带状分布的点群(见图3(a)),再经过图像的平滑过滤增强得到较理想的轮廓线(见图3(b)).
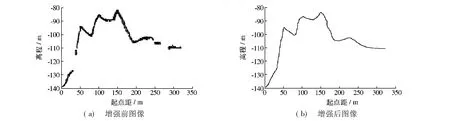
图3 图像增强对比Fig.3 Image enhancement comparison
适当运用图像增强法对原始图像进行处理,将使原始图像变得较清晰,能够较真实地反映图像的结构特征,便于水下地形重建的处理及显示.
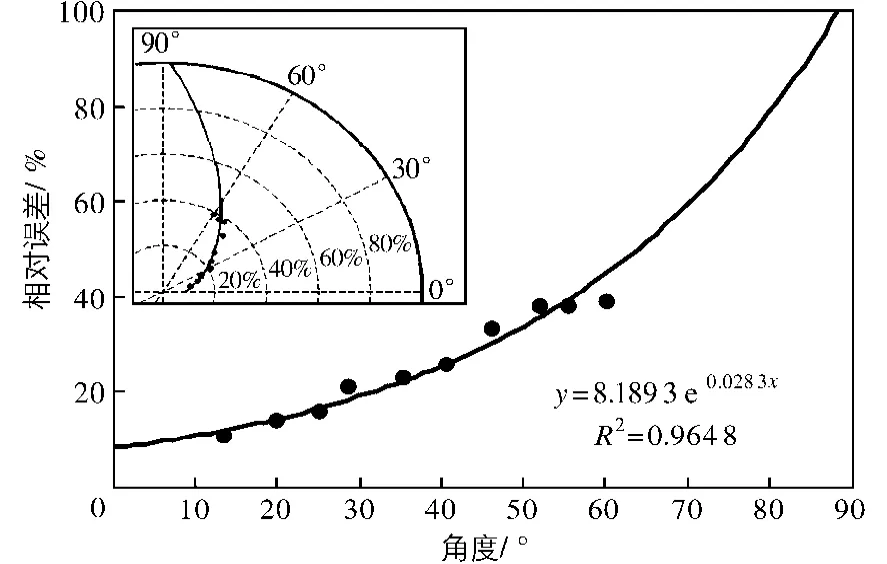
图4 误差分析曲线(拍摄角度)Fig.4 Error analysis curve(shooting angle)
1.4 数字化水下地形的重现
在实际运用中,线激光需要垂直照射地形,目的是为了减少水折射对图像的影响.摄像头安装的最佳角度是与激光面垂直,但现实中需调整适当角度才能完整拍摄水下地形轮廓线,这就要对图像变形及拍摄角度引起的系统误差进行分析.由于图像识别后得到的是像素坐标,需要还原成实际坐标.针对图像变形和坐标还原问题,可借鉴参考点法[12],选取3个或3个以上校正点就可解决.对于不同入射角度下图像采集的误差进行大量试验,得到误差分析曲线(见图4).图4左上角为极坐标系统.
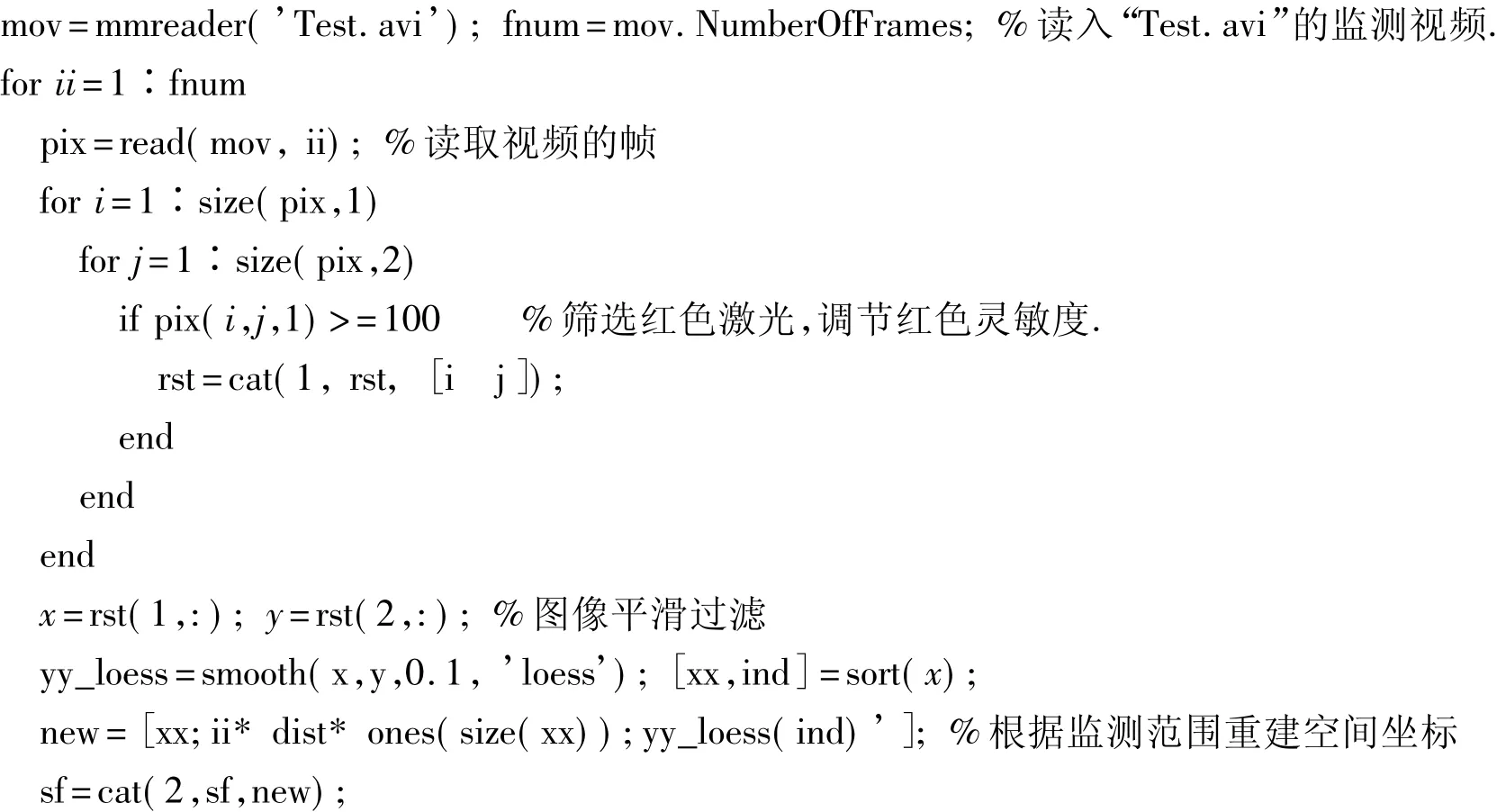
下面是水下地形重建的MATLAB代码:

2 实例分析
为验证本文所述方法的可行性,在模型试验中进行了一系列应用与验证.图5是采用本系统对某河工模型试验的水下地形冲刷过程进行实际监测、利用不同时刻的监测数据重构冲刷地形.图6为某新型管桩潜坝模型试验,工程附近局部冲刷地形照片(图6(a))与本系统监测数据的地形数值模拟再现(图6(b)),可以看出监测数据很好地反映了工程附近河床局部变形的特点,具有很高的模拟精度.

图5 水下地形冲刷过程的重建Fig.5 Scouring process rebuilding of underwater topography

图6 冲刷地形比较Fig.6 Comparison of topography scouring
水下地形数据的采集速度影响到监测数据采集的时间间隔,数据采集速度越快,对水下地形冲刷过程的还原就越好.本文就数据采集速度与拓普康全站仪(GPT-3000N)进行了比较,结果见表2.

表2 速度对比分析Tab.2 Velocity comparison
从表2可见,全站仪数据采集速度远小于本文所述方法,这是因为全站仪是单点采集数据,而该系统是线采集;更重要的是全站仪采集数据的大部分时间花费在数据储存上,而该系统则是先采集图像后处理数据,所以可节省时间、提高效率.
系统的测量精度受摄像头像素的影响,在同等清晰度条件下,像素或分辨率越大,越能体现出水下地形的细节部分.在实际应用中,并不是选用像素或分辨率越大的摄像头就越好,还应考虑镜头的质量和感光元件的性能.总之,要使采集的图像细节尽量清晰,才有助于提高图像识别的精度.
在清水及含沙量较少时,水体能见度较好,系统监测结果精度较高;随着含沙量的增加,水体能见度降低,监测精度受到影响;在激光不能照射到床面时,可以通过水下地形传感器采集床面上一些特征点的冲刷变化过程,辅助完成水下地形冲刷过程监测.在高含沙水流中,这种方法受到限制.
3 结语
(1)引进医学图像处理与分析技术,借助线激光辅助得到水下地形轮廓线.经验证该方法可行,具有实用价值.
(2)使用图像采集方法采集数据、图像识别方法处理数据,可大大节省数据采集时间,提高效率,适宜于对动态过程的监测.
(3)监测系统误差主要来自摄像头的精度.另外,图像采集时的变形、水的折射与线激光的照射角度也对测量精度有一定影响.
(4)在清水及含沙量较少时,系统监测结果精度较高;含沙量较大时,可通过辅助方法取得床面特征点的变化过程,完成水下地形冲刷过程监测.
[1]谢鉴衡.河流模拟[M].中国水利电力出版社,1990.(XIE Jian-heng.River models[M].Beijing:China WaterPower Press,1990.(in Chinese))
[2]华东水利学院.模型试验量测技术[M].北京:水利电力出版社,1984:148-149.(East China Water Conservancy Institute.Measurement technology of model test[M].Beijing:China WaterPower Press,1984:148-149.(in Chinese))
[3]唐洪武,李瑾,周浩祥.光电反射式地形仪的研制及应用[J].河海大学学报:自然科学版,1995,23(1):80-84.(TANG Hong-wu,LI Jing,ZHOU Hao-xiang.Development and application of photoelectric rcflecting topographic apparatus[J].Journal of Hohai University(Natural Sciences),1995,23(1):80-84.(in Chinese))
[4]王锐.河流动床模型激光三维扫描数据应用研究[D].南京:河海大学,2007.(WANG Rui.Research and applications of 3D scanning data of river models[D].Nanjing:Hohai University,2007.(in Chinese))
[5]蔡守允.河流海岸模型测试技术[M].北京:海洋出版社,2004.(CAI Shou-yun.Measurement technology of river and coast models[M].Beijing:Ocean Press,2004.(in Chinese))
[6]刘树东,田俊峰.水下地形测量技术发展述评[J].水运工程,2008(1):11-15.(LIU Shu-dong,TIAN Jun-feng.Development of bathyorographic survey technique[J].Port& Waterway Engineering,2008(1):11-15.(in Chinese))
[7]王振先,金欢阳.实验室用超声地形测量仪[J].海洋工程,2001,19(1):94-98.(WANG Zhen-xian,JIN Huan-yang.Development of ultra-acoustic topographic surveying meter for use in laboratory[J].Ocean Engineering,2001,19(1):94-98.(in Chinese))
[8]谭定忠,邱英,高明,等.基于CCD的激光扫描测距技术研究[J].半导体光电,2010,31(3):485-487.(TAN Dingzhong,QIU Ying,GAO Ming,et al.Research on laser scanning rangefinder based on CCD[J].Semiconductor Optoelectronics,2010,31(3):485-487.(in Chinese))
[9]林睿,常鸿森,保宗悌,等.光学图像识别技术的MATLAB仿真[J].云南师范大学学报:自然科学版,2004,101(6):36-40.(LIN Rui,CHANG Hong-sen,BAO Zong-ti,et al.Simulation of the optical image recognition by using MATLAB[J].Journal of Yunnan Normal University(Natural Sciences Edition),2004,101(6):36-40.(in Chinese))
[10]章鲁,顾顺德,陈瑛.医学图像处理与分析[M].上海:上海科学技术出版社,2006.(ZHANG Lu,GU Shun-de,CHEN Ying.Achieving disposal and analysis of medical image[M].Shanghai:Shanghai Scientific and Technical Publishing House,2006.(in Chinese))
[11]李辉,蒋秀明,高殿斌,等.Matlab语言在数字图像中值滤波中的应用研究[J].天津工业大学学报,2003,22(1):87-88.(LI Hui,JIANG Xiu-ming,GAO Dian-bin,et al.Application and study of Matlab in image median filtering[J].Journal of Tianjin Institute of Polytechnic University,2003,22(1):87-88.(in Chinese))
[12]骆永正,聂咸或.用参考点法建立地图扫描形变校正系统[J].南方冶金学院学报,1999,20(3):139-142.(LUO Yong-zheng,NIE Xian-huo.The establishment of the system for deformation correction in map scanning by using the method of reference point[J].Journal of Southern Institute of Metallurgy,1999,20(3):139-142.(in Chinese))