一种机械式电表的数字识别方法
2011-07-09雷丰中张盼盼
雷丰中,张盼盼
(郴州技师学院电气工程系,郴州423000)
0 引 言
仪表读数在工业和控制领域应用非常广泛,目前,仪器仪表被广泛地应用于各行各业的测量系统中,对于机械式仪表来说,由于没有提供数据传送的接口,这样就很难实现数据的自动采集,以满足现代自动化的需要.而当前中国的3.48亿户家庭中,正在用这些无数据传送接口的机械式电表或水表的用户占绝大多数.随着现代社会信息技术的高速发展,我们的生活和生产也向着数字化、智能化和网络化方向不断发展,机器视觉及图像处理技术在这个发展过程中发挥了重要作用,而基于图像处理技术的仪表自动识别正是在这种环境下而出现的.
作为光学字符识别技术(OCR)的一个分支,数字识别在脱机自动记录、车牌号码、身份证号码、支票号码、邮政编码、电表仪表读数以及其他编号识别方面具有重要的实用价值.
基于结构特征的识别方法,对于有限的数字字符,计算量相对较小,识别速度快.但传统的方法很多采用基于栅格的目标像素数,统计垂直、水平方向过线数目[1][2],这些方法对于不同字形、含噪声、以及变形的数字识别率较低.有的还采用神经网络,小波变换,甚至寻找各个笔画所包含的弧、角度等,使识别系统变的非常庞大、复杂,识别速度降低[3][4].
本文通过提取数字空洞和缺口的方法来识别数字,提出了一种八方向跟踪找空洞方法,该识别方法对数字变形,噪声严重的图片仍有较好的结果,大大提高了识别率,降低了系统复杂度.
1 基本原理
为了实现此类仪表数据的智能化采集而非人工抄写,首先通过手持终端的摄像头拍照获得仪表图像,然后对图像进行识别处理,最终把识别结果传送到目的设备,从而实现机械式仪表读数的批量自动化识别、管理(如图1所示).

图1 电表图像识别系统
本文采用的八方向跟踪找空洞方法是在细化后字符图像的基础上进行的,因此要先对源图像预处理,得到理想的二值化图像,再对二值化后的单个数字字符进行细化,最后用八方向跟踪找空洞方法来提取被识数字的特征.
1.1 字符图像的预处理
由于源图像色彩、大小不一,灰度模糊,以及一些噪声的存在,要先对源图像进行预处理.预处理的过程如下:
(1)滤波:采用3*3邻域的中值滤波,既很好的保留了边缘信息,又有效的将噪声滤除[5].
(2)二值化:采用一种改进的最大类间方差法,有效的将图像背景点去除[6],结合形态学的腐蚀和膨胀,得到理想的二值化图像如图2(b)所示.
(3)校正:基于字符间投影距离大小比较来确定图像的倾斜角度,再用基于双线性插值的旋转方法进行矫正[7],如图2(c)所示.
(4)分割:采用区域生长的方法分割出二值化后的连通区域,根据数字高度与宽度的阈值可有效去除与数字相连的噪声,得到其长宽比符合目标数字的连通区域.
(5)细化:采用几条简单的规则来决定是否删除像素点,达到细化的目的,不但保持了原图像的几何和拓扑特征,而且更重要的是减少了图像的冗余,使得找空洞法的效率大大提高[8],如图2(d)所示.
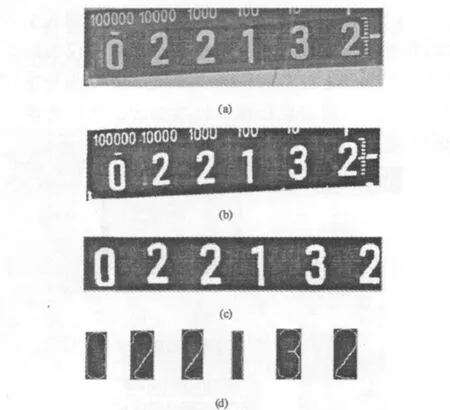
图2 字符图像预处理
1.2 快速的八方向跟踪找空洞算法
空洞和缺口是数字非常重要的结构特征.数字0、4、6、8、9等有明显的空洞,2、3、5、7 则有明显的缺口.在判断这些数字时采用这类结构特征是快速有效的.
现有的找空洞方法一般是在源图像二值化基础上采用边缘跟踪法[9],这种方法受噪声干扰,数字变形等影响较大,正确率较低.还有的找空洞法采用双向扫描算法[10],此方法对字符本身的变形、笔划断裂等出错严重.
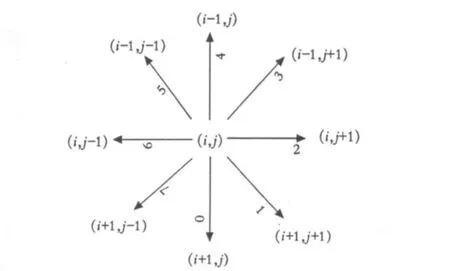
图3 八方向跟踪算法方向图
八方向跟踪算法如下:
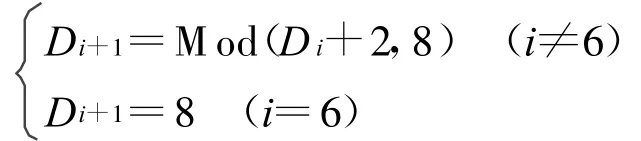
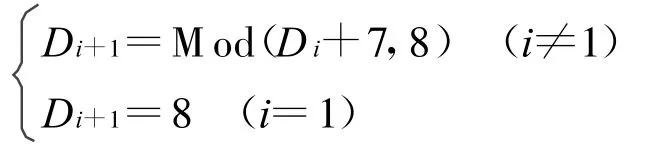
(2)以当前目标点Di,以及当前方向为标准左转90°判断下一点D i+1是否为目标点.
判断是否有空洞的条件为:对细化后的目标数字,选择起始跟踪目标点Dstart,并设置初始方向为八方向跟踪算法的方向图中的2方向,若跟踪到的第二个目标点与跟踪结束前一个目标点为不同点则为洞,若是相同点则为非洞.
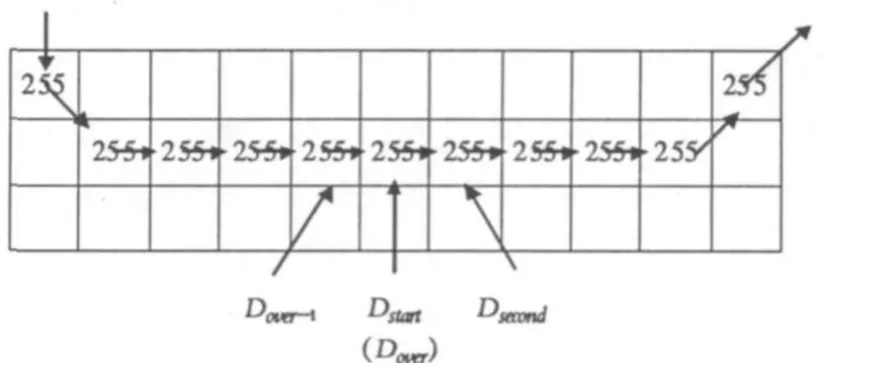
图4 八方向跟踪示意图
八方向跟踪找空洞法的原则是:找到一个起始点,一直逆时针走下去,直到走到起始点,图5中对于初始跟踪点3点,其邻域图右边所示,则数字2的上部分原本非洞被判定为洞,原因在于存在"直角目标点"使得跟踪出发与结束的路线不同,导致非洞被视为空洞.正因为本文对细化图像中冗余像素的剔除,使得八方向跟踪法从开始每次进行时的下一个点只有一个选择,直至逆时针走到起始点位置.
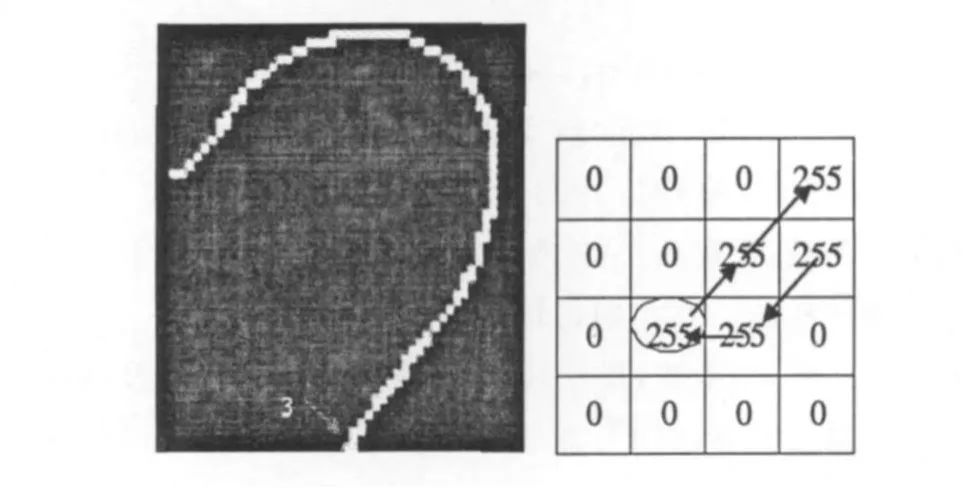
图5 存在“直角目标点”的细化字符
2 数字字符识别过程
2.1 数字字符的特征提取
细化后的数字字符基本上保持了原字符的结构和形状
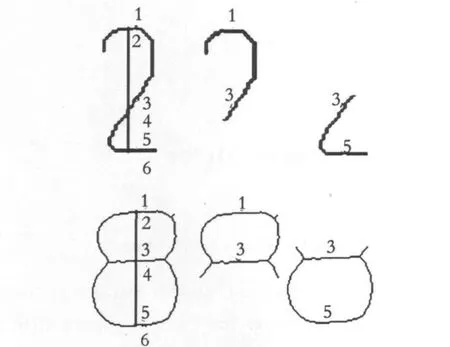
图6 细化后的数字字符标注
特征一:tag1-tag6值
对于得到的细化字符,在数字的中间处作一垂线,与数字相交,记录下所有成对边缘点,标记为tag1-tag6.
特征二:hole1、hole2值
若一个字符的标注有6点,则将字符一分为二,记4、5点之间行以上为上部分,记 2、3点之间行以下为下部分.对于少于6个点的字符,则整个字符为上部分.从标注的3点和5点开始,采用找空洞方法分别判断上下部分是否有洞.上部分有洞,记hole1=1,否则 hole1=0,下部分有洞 ,记 hole2=1,否则hole2=0.
特征三:stroketag2、stroketag4值
从标注的2点下一行对应点向右穿线,遇到笔画标注stroketag2即stroketag2=1.从标注的4点下一行对应点向右穿线,遇到笔画标注stroketag4即stroketag4=1.
2.2 基于特征的数字字符识别
对于分割后得到的目标字符,先求出其高与宽,若高宽比大于等于3,此数字为1;细化之前根据整幅图像中字符的平均值,判断当前字符是否为正常高度数字,并进行标注,对于非正常高度的数字认为其是残缺字符.
对于正常高度的数字用以下方法进行识别:将提取以上三个特征值后的目标字符分类,hole存在的属于0、4、6、8、9一类字符,hole不存在的属于2、3、5、7一类字符.具体分类如表1所示,其中‘-'表示无需对该特征进行判断:
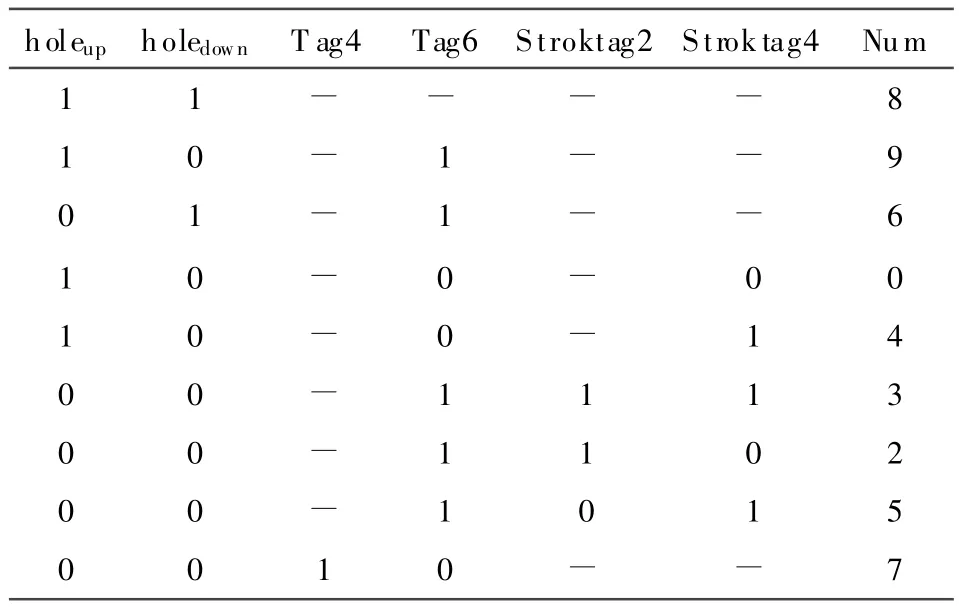
表1 数字识别归类
3 实验结果
对随机采集的850幅机械式电表图像,采用该识别方法进行识别.表2为分割得到的5087个0~9字符的测试结果,正确识别率达到99.04%,误识率仅为0.96%.
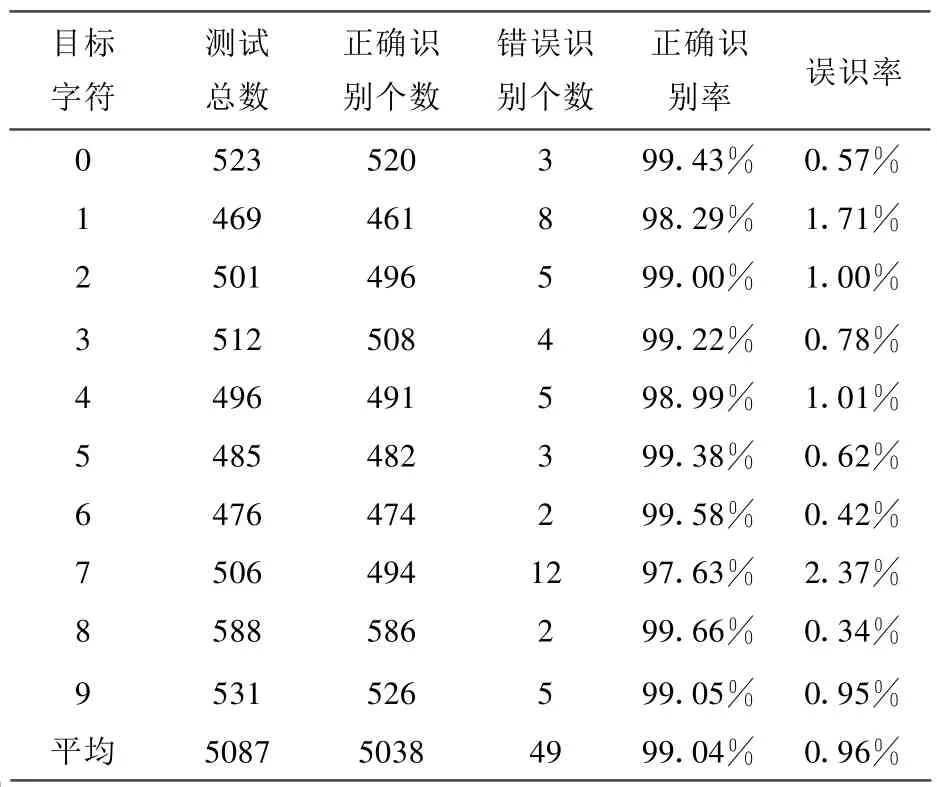
表2 字符识别的测试结果
4 结 论
本文采用八方向跟踪找空洞方法对0~9十个数字进行识别,该找空洞法是在源图像细化后采用八方向跟踪法,选择初始跟踪点,对细化后有限的目标像素值进行跟踪,查看首尾相接时,其出发线路与结束线路是否相同.与其他的识别方法相比,该方法无需对字符大小、字形归一化,对于噪声严重以及变形字符,其准确率高,速度快,对数字的识别率能达到99%以上.
[1]S.Mathur,R.Munkong,C.mason,and M.yeary.Numeral Recognition for Quality Control of Surgical Sachets[J].IEEE,2002.
[2]刘建华,牛秦洲,程小辉,等.基于特征的印刷体数字符号识别系统[J].桂林工学院学报,2005,25(1):101-103.
[3]Ernest Valeny,Antonio Lopez.Numerical Recognition of Unstrained Handwriting[J].IEEE,2003.
[4]吴 谨,刘 洋.具有抗噪稳健性的数字识别[J].武汉:武汉科技大学学报(自然科学版),2004,27(4):406-408.
[5]Rafael C.Gonzalez.Digital Image Processing,Second Edition[M].Beijing:Publishing House of Electronic Industry,Aprial,2008.
[6]乔万波,曹银杰.一种改进的灰度图像二值化方法[J].电子科技,2008,21(11):63-65.
[7]史 燕,吕永战,张 帆.车牌识别中的二值化及快速倾斜校正算法[J].现代电子技术,2009,(5):149-152.
[8]吴 丹.一种快速准确的细化算法[J].计算机与现代化,2003,(1):6-10.
[9]许捍卫,王 成.一种简单的数字识别研究[J].地矿测绘,2000,(2):31-33.
[10]Wanye Yao.The Research and Application of Method of Digital Recognition with Noise[M].North China E-lectric Power University,Dec,2006.
