基于混合交叉作业的码头集卡路径优化模型*
2011-07-09冯春焕
陈 超 冯春焕
(大连海事大学交通运输管理学院1) 大连 116026)(天津市宁河县人口和计划生育委员会2) 宁河 301500)
0 引 言
目前关于码头集卡路径优化的研究具代表性的有Pyung Hoi Koo[1],研究了码头静态的运输问题,并使用两阶段启发式禁忌搜索算法,确定每辆拖车最优路径并满足拖车配置数量最少;Nishimura等[2]提出了拖车动态路径调度方法,并使用遗传算法求解;Kim等[3]研究了装船操作情况下拖车路径模型,并使用束搜索算法进行求解;杨静蕾[4]基于单船进出口操作同时进行的作业面情况,求解集卡最优行走路径;李磊等[5]针对进出口泊位,提出基于时间最短的集卡优化模型,设计了免疫禁忌算法进行调度;曾庆成等[6]建立装卸动态混合调度模型,设计并说明两阶段禁忌搜索算法对结果的有效性.针对以往的研究,基于岸桥装卸混合交叉作业的集卡路径优化的研究还相对较少,本文则建立了基于岸桥组合的码头泊位整体“作业面”装卸作业集卡动态路径优化模型,并对码头整体“作业面”生产的集卡路径进行了优化设计.
1 问题描述
集装箱码头的生产作业过程主要包括卸船作业和装船作业.卸船作业先是由岸桥将集装箱从船上卸下至岸上、再由集卡完成从桥边到堆场的水平搬运,最后由场桥完成集装箱在堆场的堆放依次链接形成;装船作业流程则反之.据此在船舶作业的方式上可分为2种:即装卸分别作业方式(先卸后装)和装卸混合作业方式(边卸边装).在船舶装卸作业过程中,生产是以岸桥为基准,以贝位为对象,分头装卸操作.为了保证设备使用效率、提高装卸作业效率,每一个岸桥,通常需要配置一定数量的集卡来完成相应的水平搬运操作,场桥也是如此.这些执行同一任务的集卡,通常称之为作业组.当它们只在某个固定岸桥和某个固定场地间进行闭合运行时,此作业方法称之为“作业线”法;而当它们在某两个以上固定岸桥和某两个以上场地之间进行循环闭合运行时,其作业方法则称之为“作业面”法.在“作业线”法中,集卡进行独立装卸作业(见图1);在“作业面”法中,可以把固定的两个岸桥服务于同一船舶的情况,称之为装卸独立混合作业;把固定的两个岸桥服务于不同船舶的情况,称之为装卸交叉混合作业(见图2).作业组是码头生产运作的基本单元,但一个作业组应该有多少集卡通常是不确定的,因为它既要受船舶岸桥间的作业负荷平衡要求影响,又要受固定岸桥与集装箱堆放地点之间的距离长短影响.因此,不同的作业组,拥有不同的集卡数量;不同的路径,也需要不同的集卡数量.由此可见,作为影响作业组运行成本的路径设计问题,就成为提高码头设备使用效率和运行效率、降低运行成本等指标的基本问题.而影响码头各种路径形成和选择的因素,除了作业方式和方法的选择外,还包括泊位船舶装卸状态、泊位岸桥开工数量、集装箱堆放地点分布情况如地点数目和各自堆放数量等.它们的相互关联、相互作用、相互制约,共同决定着码头作业组数量、路径的优化选择.
本文考虑固定的装卸岸桥服务于不同船舶的情况即基于装卸混合交叉作业的模式,构建集卡路径优化模型,根据码头船舶的挂靠情况和进出口箱区的计划堆存数量等要素,动态指派集卡进行装卸箱作业[7-8],有效缩短集卡的行驶距离,提高集卡的利用效率和集装箱码头的整体运作效率.
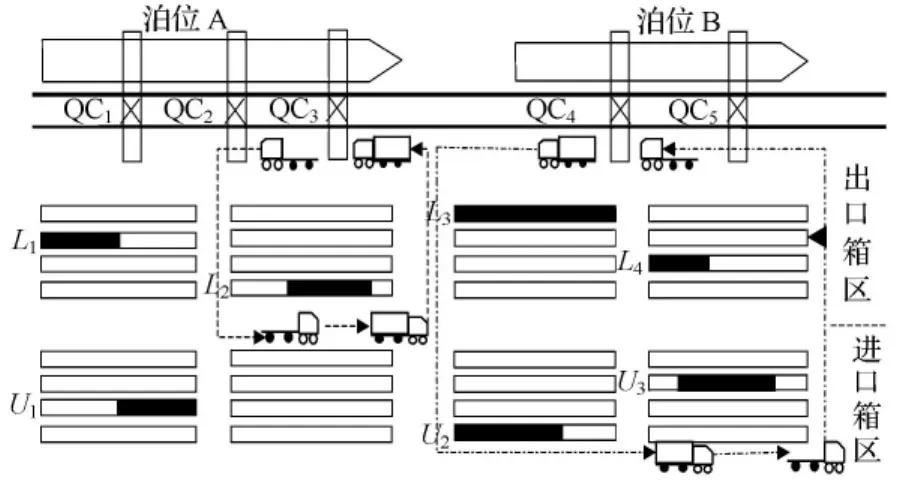
图1 独立装卸作业
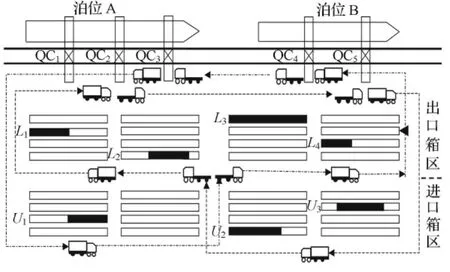
图2 装卸交叉混合作业
2 集卡路径优化模型
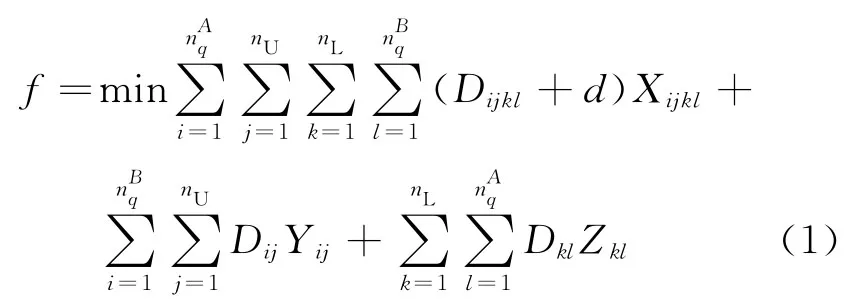
针对以上问题描述,选择主要影响因素.由集装箱码头物流运作的实际情况可知,集卡一次装载1TEU,而且由各岸桥到各箱区的距离不等于从各箱区返回到各岸桥的距离,即往返行驶距离不相等.码头某时刻泊位A和泊位B有船舶挂靠并进行装卸船混合作业,构建混合交叉作业模型.以每个岸桥为基准,交叉作业运输的箱量(TEU),用Xijkl表示,则Xijkl即为从卸货岸桥到进口箱区到出口箱区再到装货岸桥的集卡作业次数;从第i个岸桥到第j个箱区的独立作业运输的卸箱量,用Yij表示;从第k个箱区到第l个岸桥的独立作业运输的装箱量,用Zkl表示,作为决策变量.QU为挂靠船舶的待卸箱量,为泊位A船舶需要卸载的集装箱量,为泊位B船舶需要卸载的集装箱量;QL为挂靠船舶的待装箱量,为泊位A船舶需要装载的集装箱量,为泊位B船舶需要装载的集装箱量;为泊位A船舶开岸桥头数为泊位B船舶开岸桥头数为泊位A船舶上第i个岸桥为泊位B船舶上第i个岸桥;Uj,Lk为第j个进口箱区和第k个出口箱区的计划堆存量;nU,nL为进口箱区数量和出口箱区的数量;从第i个岸桥卸箱到第j个箱区再到第k个箱区装箱运至第l个岸桥装箱的距离用Dijkl表示(km);第i号岸桥到第j号堆场的距离用Dij表示;第l号岸桥到第k号堆场的距离用Dkl表示;两泊位之间的固定距离用d(km)表示.
目标函数
约束条件
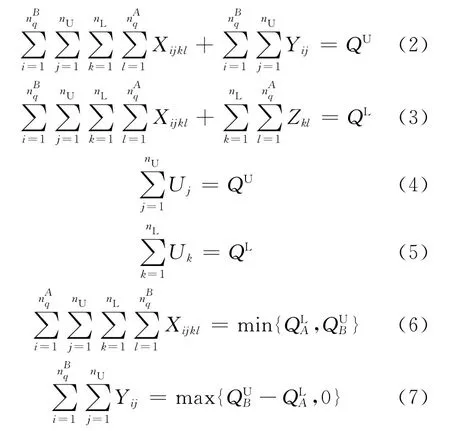
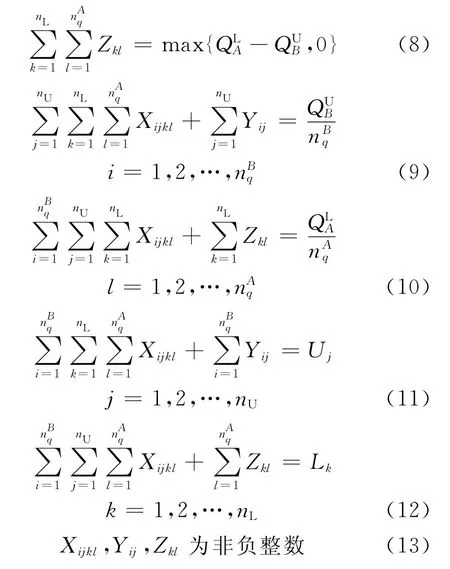
式(1)为目标函数,目的是使在混合交叉作业下集卡行驶总距离最小;式(2)和式(3)定义了集卡装卸集装箱的行走次数即为船舶待装卸集装箱的数量;式(4)保证了船舶待卸箱量等于进口箱区的计划堆存箱数;式(5)保证了船舶待装箱量等于出口箱区的计划堆存箱数;式(6)表示交叉作业的次数,即集卡在装卸岸桥和进出口箱区之间形成的闭合路径上的行驶次数;式(7)表示独立卸箱作业的次数,如果一个泊位船舶的卸箱量大于另一泊位船舶的装箱量,那么多余的箱子需要独立卸箱作业;式(8)表示独立装箱作业的次数,如果一个泊位船舶的装箱量大于另一泊位船舶的卸箱量,那么多余的箱子需要独立装箱作业;式(9)和式(10)表示岸桥i的作业次数等于岸桥i的作业量,即泊位船舶上待作业箱子总量除以进行装、卸箱作业的岸桥数量;式(11)表示船舶卸到第j个进口箱区的箱子数量等于第j个进口箱区的计划卸箱堆存数量;式(12)表示第k个出口箱区的计划待装箱量要全部装上船舶;式(13)是变量的整数约束.
3 算例分析
假设有3个进口箱堆区和4个出口箱堆区分散堆放待卸和待装的箱子,利用此模型可以得出集卡对船舶装卸混合交叉作业的路径.例如,码头某一时刻A,B 2泊位有船舶挂靠,A泊位船舶装载430TEU开2个岸桥,B泊位船舶卸载645 TEU开3个岸桥,各岸桥与各堆区的距离(见表1),各箱区计划堆存的箱量(如表2所列),根据以下参考数据利用lingo9.0软件可以求解出集卡的优化路径和行驶距离.
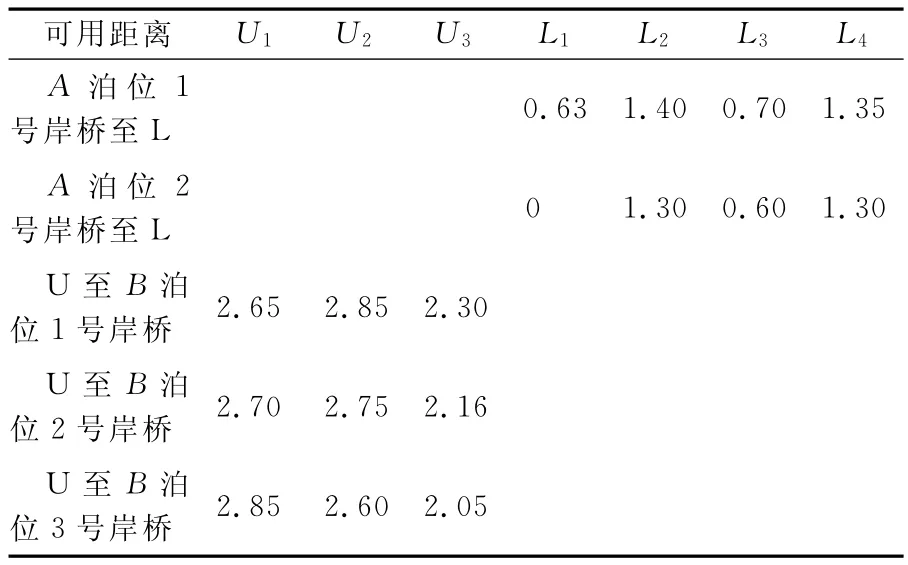
表1 岸桥与进、出口箱区间的可用距离 km
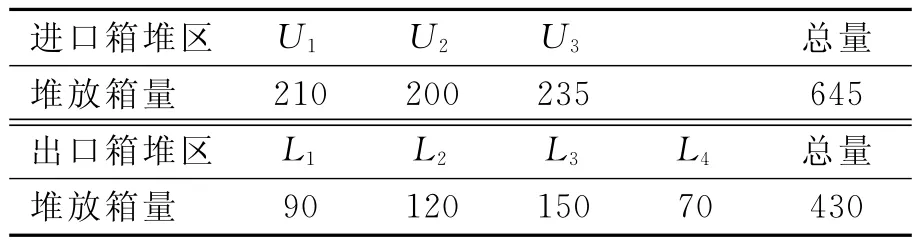
表2 各个进出口箱区的计划堆箱量 TEU
通过lingo9.0软件求解,将各数据带入模型主程序之中,可以得出如下结果:集卡总行驶距离f=1 580.8km,X(1,1,1,1)=90.00 次;X(1,1,2,1)=55.00;X(1,1,2,2)=65.00次;X(1,3,4,1)=5.00 次;X(2,3,3,2)=150.00次;X(2,3,4,1)=65.00次;Y(3,2)=200.00次;Y(3,3)=15.00次.具体优化路径如表3所列.如果码头集卡的调度采用独立装卸作业方式的话,即固定的集卡只进行待装船集装箱的搬运或者只负责待卸船集装箱的运输,集卡的空驶距离将会大大增加,造成设备的浪费.使用混合交叉作业优化模型,不仅可以高效提高集卡的重载行驶距离,其总行驶距离也大幅度降低,比较结果见表4.
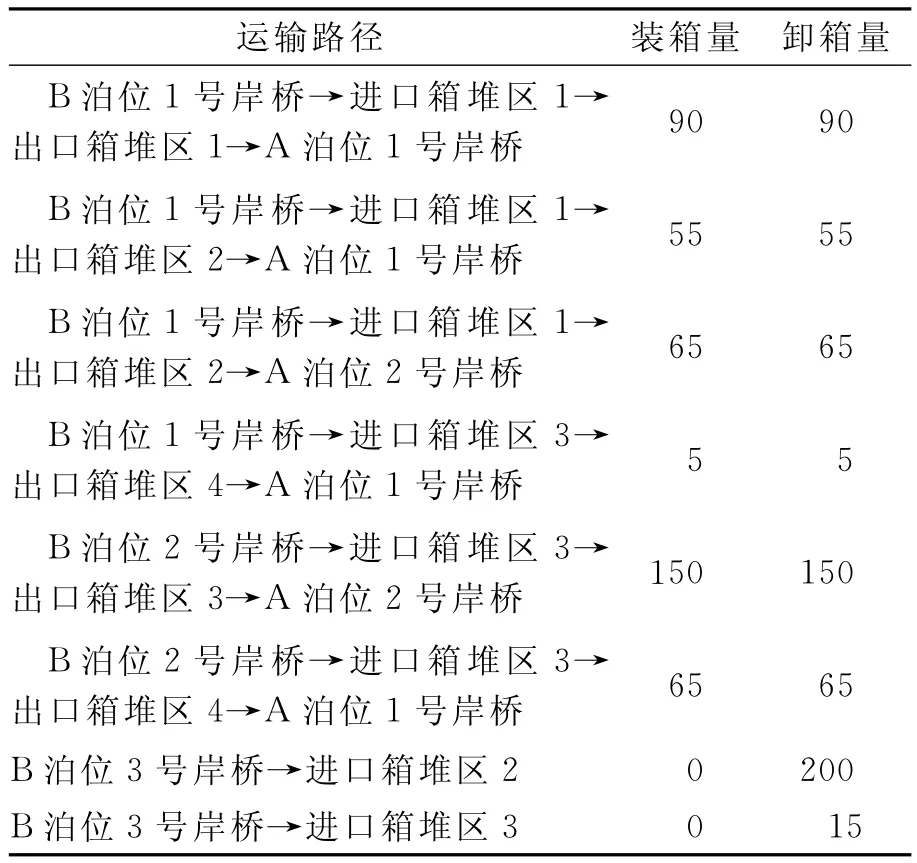
表3 集卡最终优化路径 TEU

表4 运输距离结果比较 km
从表中可以看出,本文模型计算出的距离远远小于独立装卸作业的集卡运行距离,即总距离节省了20.28%,大大降低了集卡的空驶距离,提高了集卡的利用效率,从而降低了码头能源消耗.
4 结束语
本文设计的优化模型能够以岸桥组合为作业单元,求解出基于混合交叉作业模式下集卡的最优行驶路径和对应的装卸箱量.通过以上算例分析,该模型在满足装卸箱作业量的要求下能够有效缩短集卡行驶距离,提高集卡的利用效率,其有效性为提高集装箱码头的生产效率,降低码头能源消耗奠定了重要的基础.
[1]Koo P H,Lee W S,Jang D W.Fleet sizing and vehicle routing for container transportation in a static environment[J].OR SPECTRUM,2004,26(2):193-209.
[2]Nishimura E,Imai A,Papadimitriou S.Yard trailer routing at a maritime container terminal[J].Transportation Research Part E:Logistics and Transportation Review,2005,41(1):53-76.
[3]Kim K H,Kim K Y.Routing straddle carriers for the loading operation of containers using a beam search algorithm[J].Computers &Industrial Engineering,1999,36(1):109-136.
[4]杨静蕾.集装箱码头物流路径优化研究[J].水运工程,2006(1):32-35.
[5]李 磊,孙俊清,韩 梅.基于“作业面”的集装箱码头集卡路径优化的研究[C]//昆明:中国自动化学会,第27届中国控制会议论文集,2008:541-545.
[6]曾庆成,孙丽敏,杨忠振.集装箱码头装卸混合调度模型[J].哈尔滨工业大学学报,2009,41(10):287-289.
[7]严 政,陶德馨.基于动态优化组合的集装箱码头集卡调度技术[J].武汉理工大学学报:信息与管理工程版,2006,28(4):26-29.
[8]靳志宏,朴惠淑,杨华龙.集装箱多式联运系统装卸与运输一体化优化问题[J].系统工程,2005,23(11):1-6.
