基于模糊自调整PID控制器的汽包水位控制
2011-07-03张志娟
张志娟
(河南化工技师学院仪表自动化系,河南开封475002)
热电厂汽包水位的控制过程是一个复杂的控制过程,多采用PID控制[1]。简单PID控制方法和组合改进后的PID控制方法虽然具有自身参数物理意义明确、易于调试改动的优点,但是该控制器对非线性系统进行控制时鲁棒性差,对被控对象数学模型的精确度要求较高,而智能控制是一种新型算法,它在模型具有不确定性、高度非线性的情况下也能够胜任复杂的任务要求,可以弥补传统PID控制过分依赖数学模型、鲁棒性差及控制任务单一的缺点。本文将智能控制方法与传统PID控制方法相结合,设计了汽包水位模糊自调整PID控制器,使生产过程的控制效果更好。
1 模糊自调整PID控制器的设计
数字PID控制器[2]的数学表达式为:

其中:u(n)是第n次采样时刻控制器输出量;e(n)为第n次采样时刻控制器输入量(偏差信号);kp、ki、kd分别为比例系数、积分系数和微分系数。
模糊自调整PID控制器采用二输入三输出的模糊控制器,输入分别为系统偏差e、偏差变化率ec,输出为 Δkp、Δki、Δkd,用于调整数字 PID 控制器的三个参数,其系统如图1所示[3]。
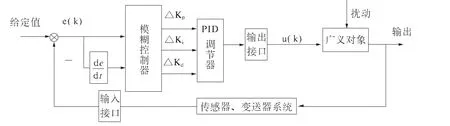
图1 汽包水位模糊自调整PID控制系统
模糊控制规则是根据专家经验总结出来的规则,如表1、表2和表3所示。输入输出模糊语言词集都选用7 个语言变量,分别为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)。工作时通过不断检测系统偏差和偏差变化率值,根据模糊控制规则得出输出值Δkp、Δki、Δkd,然后按照 kp=kp'+ Δkp、ki=ki'+Δki'、kd=kd'+Δkd的规律对 PID 控制器的系数 kp、ki、kd分别进行校正。其中 kp'、ki'、kd'分别为 PID 控制器的基准值,Δkp、Δki、Δkd分别为通过模糊控制得到的输出值,kp、ki、kd分别为校正后的值。
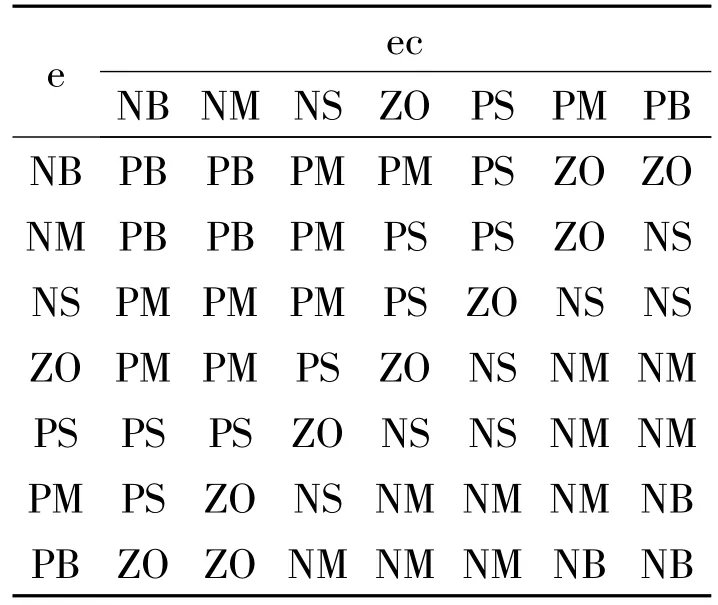
表1 Δkp的模糊规则
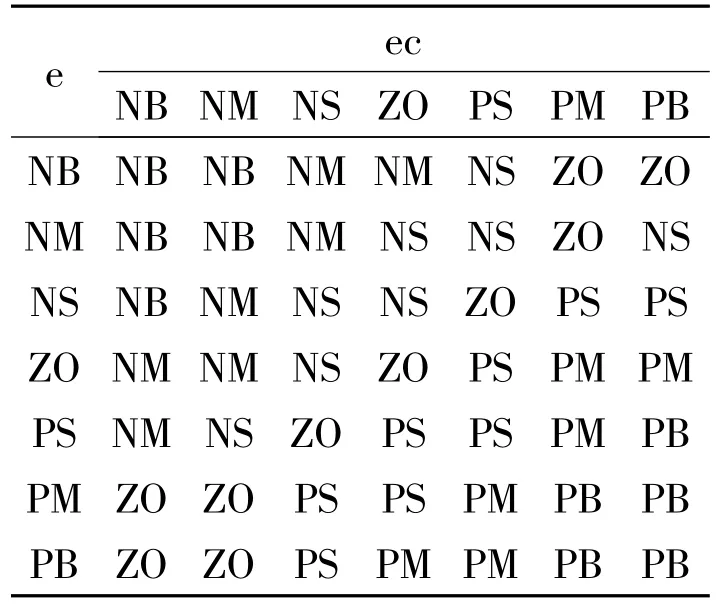
表2 Δki的模糊规则

表3 Δkd的模糊规则
2 汽包水位的模糊自调整PID控制
汽包水位是一个多变量、非线性、大延迟的被控对象[4-5]。其干扰因素主要是给水流量和蒸汽流量,在给水流量扰动情况下,汽包水位的阶跃响应特性为,在蒸汽流量扰动情况下,汽包水位的阶跃响应特性为控制方案采取目前实际生产中广泛采用的串级三冲量控制,如图2所示。
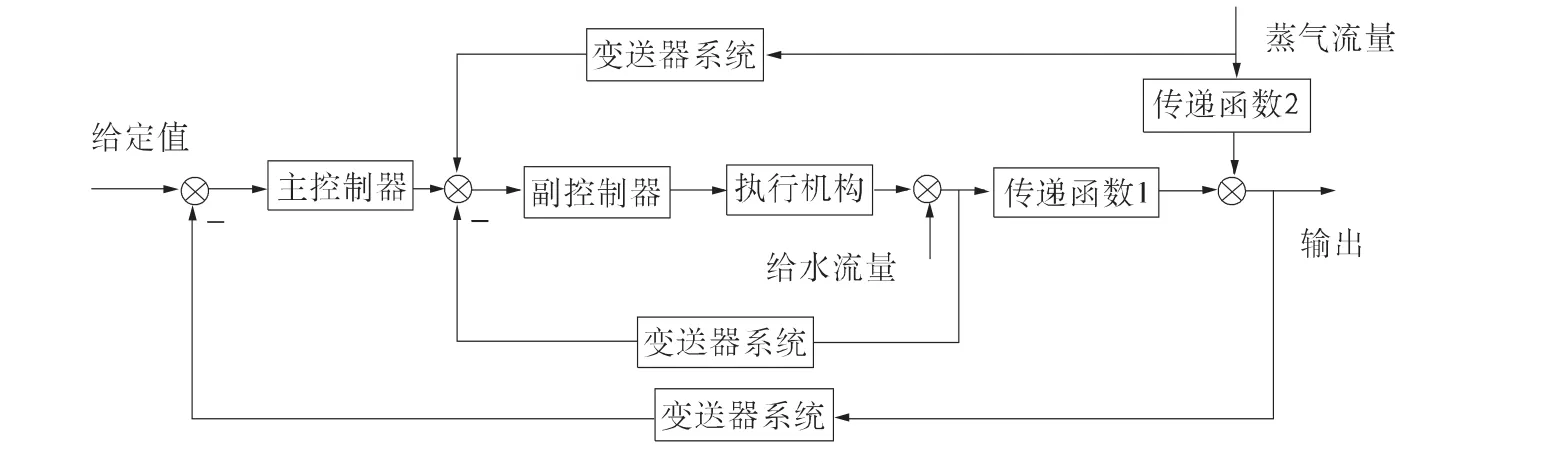
图2 串级三冲量水位调节原理
串级三冲量水位调节器的主调节器采用模糊自调整PID控制器。设定好参数后,利用Matlab仿真软件中的M文件对控制系统进行编程,加入蒸汽扰动阶跃响应,得到如图3所示的仿真结果,可以看出系统达到稳态的时间明显变短,超调量减少,模糊自调整PID控制器的控制效果较优于普通PID控制器的控制效果。
3 汽包水位模糊自调整PID控制器的组态
某公司的热电锅炉采用新华公司的XDPS-400分散式控制系统[6],安装XDPS2.05后,点击DPU菜单中的“新文件”,建立DPU组态文件DPU*.TXT。因为模糊自调整PID控制器实际上是模糊P控制器、模糊I控制器和模糊D控制器等3个控制器的组合,所以在组态时用3个模糊模块和1个PID模块。模糊控制模块采用离线查表工作方式,将上述设计的控制器用Mamdni推理方法和重心法解模糊,将输入偏差和偏差变化率的值设为13个等级,即{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},把对应输入输出值制成表格,将表值输入到 XDPS-400的模糊控制模块。系统工作时,根据输入数值查看表格,判断属于哪一档从而得到响应输出。
当自动调节状态满足时,输出值由模糊控制器对水位进行调整,输出控制器控制执行机构进行动作,对给水量进行调节。进行汽包水位模糊自调整PID控制的组态图如图4所示。

图3 控制效果仿真结果
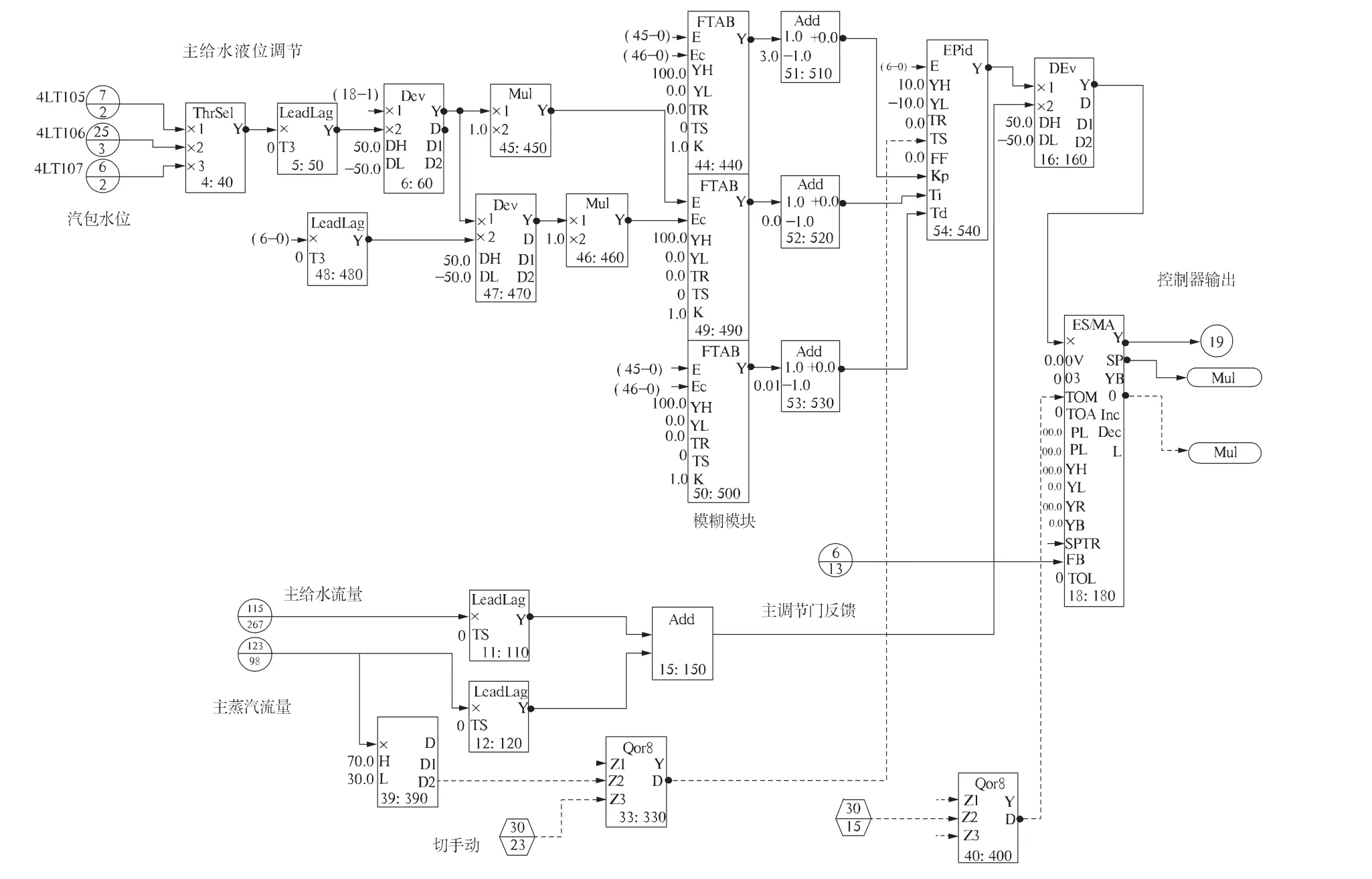
图4 汽包水位模糊自调整PID控制组态图
4 结束语
本文针对热电厂汽包水位容易受蒸汽负荷扰动产生虚假水位这一现实情况,设计了汽包水位模糊自调整PID控制器,并且在分散控制系统XDPS-400中用组态软件进行组态编程,经实际使用,效果良好。
[1]俞海斌,禇健.CFB 锅炉汽包水位的专家 PID 控制[J].机电工程,2000,17(4):103-106.
[2]刘金坤.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[3]韩俊峰,李玉惠.模糊控制技术[M].重庆:重庆大学出版社,2003.
[4]边立秀,周俊霞,赵劲松,等.热工控制系统[M].北京:中国电力出版社,2001.
[5]张玉铎,王满稼.热工自动控制系统[M].北京:水利电力出版社,1985.
[6]何衍庆,陈积玉,俞金寿,等.XDPS分散控制系统[M].北京:化学工业出版社,2002.
