基于信息融合的客车车门控制研究
2011-07-03荣祖兰
荣祖兰,张 霞
(长沙职业技术学院,长沙 410217)
0 引言
近年来,客车火灾事故、爆炸事件时有发生,给国家和人民的生命财产造成不应有的损失。对于这类紧急情况,客车上一般都有应急窗口,乘客从车门或应急窗逃生。如果紧急情况下司机来不及打开车门,乘客只能从应急窗口逃生,有些乘客就会无法脱离危险。当发生危险情况,如果车门不需要司机干预能够自动打开,就增加乘客逃生的出口,减少乘客的伤亡。
本文提出的基于信息融合的控制系统可对客车出现紧急情况进行可靠的预测预报,并且不需要司机干预在满足一定的条件下能使车门自动打开。客车出现紧急情况包括火灾事故,爆炸事故等。本系统能采集客车多种参数,预测预报火灾和爆炸事故、车速识别、声光报警及发生险情时关闭相关设备和开启车门供乘客逃生等功能,解决的关键问题是对车内环境状况的识别。
1 多传感器信息融合理论
多传感器信息融合是对多种信息的获取、表示其内在联系进行综合处理和优化的技术,从多信息的视角进行处理、综合,得到各种信息的内在联系和规律,从而剔除无用和错误的成分,保留正确和有用的成分,最终实现信息的优化,使之能够完善、准确地反映环境特征。
多传感器信息融合主要有贝叶斯估计、卡尔曼滤波、概率统计法、D-S证据推理、模糊推理和神经网络等方法。这些理论和方法都有各自的优点和不足,它们应用于不同的融合层次,以期满足特定的应用背景的要求。车内环境状态具有较强的模糊性,如,客车内温度,烟度等环境的安全状态、轻微状态和危险状态之间没有明确的界限,因此,适合采用模糊分类方法对其进行识别。针对传统环境检测方法信息损失量大这一不足,本文采用模糊集理论与信息融合技术相结合。模糊技术和信息融合技术各有自己的优点,二者有机结合,可有效发挥其各自的优势,并弥补其不足。
1.1 多传感器模糊信息融合理论
模糊集的基本思想是把普通集合中的绝对隶属关系灵活化,使元素对集合的隶属度可以取[0,1]区间中的任一数值,因此,很适合用于传感器信息的不确定性进行描述和处理。在应用多传感器信息融合时,模糊集理论用隶属度函数表示各传感器信息的不确定性,然后利用模糊变换进行数据处理。
为了确定各传感器所观测的特征值相对于客车环境各状态的隶属函数形式,将环境状态划分为三种模糊状态,即正常、轻微和危险。分别用H0、H1、H2表示,采用i、j分别表示不同传感器和客车环境状态。采用柯西模糊集来构造隶属函数,定义隶属函数µij(x),其中:i=1, 2, 3;j=1,2, 3,隶属函数可以表示为:
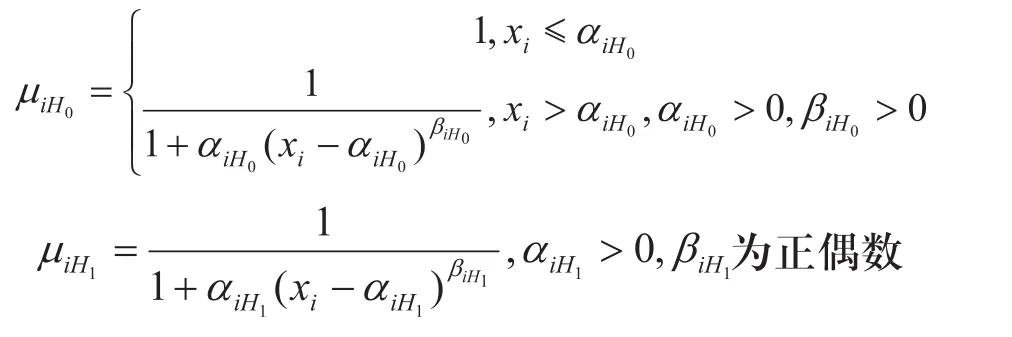

式中:µiH0,µiH1,µiH2为由传感器 vi测定的客车环境属于正常、偏危、危险三种状态的隶属度值;xi表示传感器测量系统实际测得特征值;αH0,αiH1,αiH2为传感器i测定客车环境属于三种状态的标准特征值,βiH0,βiH1,βiH2为控制系数,均为大于零的常数。显然0≤ij≤1,根据µij可得模糊关系矩阵R*={µij*}。
设各传感器的权重模糊向量A={a1, a2, a3},对该模糊向量进行归一化处理得到模糊向量:

按照线性变换有:

B中个元素Bj(1, 2, 3)即为客车环境监测时三种传感器信息融合后判断客车环境属于状态j的可能性[1]。
1.2 信息融合系统的结构
将多传感器模糊信息融合理论引入到客车安全环境监测上。由于客车的环境受诸多因素影响,为了研究方便,选用几种与客车安全检测相关的传感器,例如:温度传感器、烟度传感器、感光传感器等。
在目标识别级的融合中包括决策级融合、特征级融合、数据级融合。特征级融合必须使用并联处理将特征向量分成有意义的群组;数据级融合必须所有传感器是同类型的;本文采用决策级融合[2,3]。决策级融合具有很高的灵活性,系统对信息传输带宽要求较低,能有效地反映环境或目标各个侧面的不同类型信息。当一只或几只传感器出现错误时,通过适当的融合,系统还能获得正确的结果,所以具有容错性,通信量小,抗干扰能力强;对传感器依赖性小,传感器可以是同质的,也可以是异质的。在此方法中,首先要对源传感器进行预处理,以获得各自的判定结果。图1为客车多传感器模糊信息融合系统融合结构。
在该结构中,采用温度传感器、烟度传感器、感光传感器来获取被测环境的信息。对每只传感器来讲,被测环境属于哪一种状态的可能性用隶属度值来表示,则可得到3组共12个模糊隶属度值。应用多传感器模糊融合理论对三组隶属度值进行融合处理,得到三种传感器融合以后被测环境的状态隶属度值,再根据一定的决策规则对被测环境进行判定。
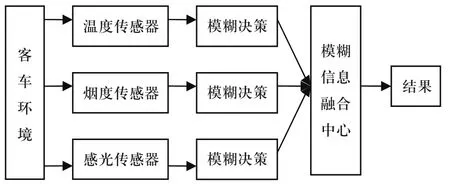
图1 模糊信息融合系统结构图
2 模糊信息融合算法实验
在试验中,将决策级等级分为正常、轻微和危险三个等级。由于温度传感器,烟度传感器和感光传感器在系统中的位置和精度不同,根据客车实际情况和试验数据分析,分配传感器的权重向量为(= 0.43,= 0.35,= 0.22)。
三只传感器将数据传送到融合中心,融合中心的危险判决过程如下:首先对每只传感器的局部判决结果进行归一化,由各归一化的结果组成判决矩阵,对传感器向量和判决矩阵进行合成运算,然后对合成运算结果采用最大隶属度方法,得出对危险状态的综合判断。
在融合系统中,某一时刻的各传感器归一化后的判决结果如表1所示。
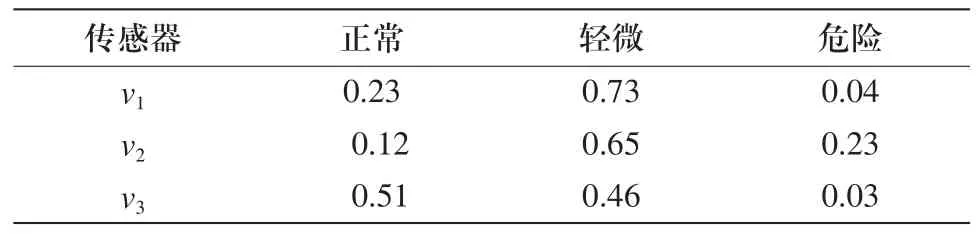
表1 试验数据
在试验中,取融合中心合成运算的算子为模糊集并交运算(∨∧),则b合成运算的结果为:


表2给出了3种传感器各自的隶属度值以及其按照判决规则得到的客车环境状态监测结果,同时,给出融合后的隶属度值和按照同一判决规则得到的监测结果。
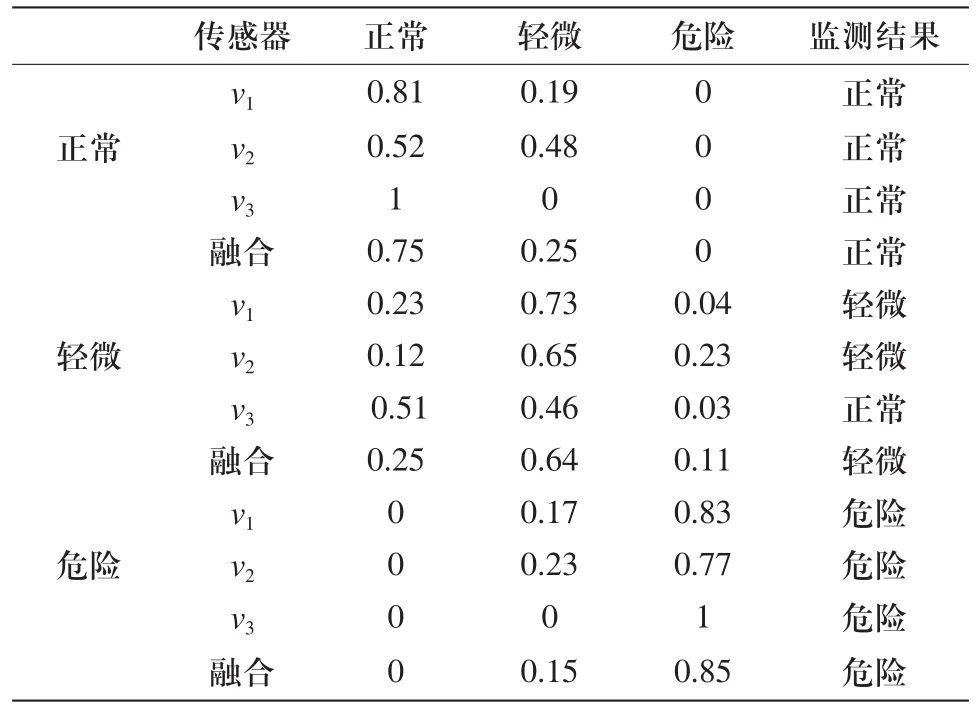
表2 传感器单独识别和多传感器融合识别结果
从实验结果可看出:若仅以单传感器判决,其结果由于传感器的限制可能导致状态的误判。如在轻微危险状态下,传感器v3在最大隶属度方法判决规则下判决结果为正常即环境处于安全状态,而用信息融合的方法判决结果为轻微危险状态。因此,在基于模糊信息融合算法中,融合了来自多传感器的软判决结果,进行多级别、多方而、多层次的融合处理,从而增加状态监测的置信程度,提高并改善了监测系统的性能。可见采用多传感器模糊信息融合可大大减少由单传感器信息量限制引起的误报和错报,降低了不确定性,有效提高了环境监测的准确率。
3 车门控制系统设计
针对某客车设计了车门控制系统。由于客车货仓内的环境状况(如发生火灾)乘客和司机察觉不到,因此,在货仓内装有温度传感器,烟度传感器和感光传感器,此三种传感器感知货仓的环境变化,并把信号发送到单片机内,单片机运用信息融合的方法对这些信号进行处理,如果判断出现危险情况则发出声光报警信号,当检测到车速为零时,执行器动作,如果此时司机打开了车门,则此动作无效;如果司机没有打开车门,则使车门自动打开。
3.1 硬件设计
该控制系统采用Freescale HS12微处理器,它具有Freescale高度节能型S12核,支持5V应用;带有内部EEPROM、定时捕获模块、稳压器、输入/输出(I/O)复用器、看门狗电路与模数转换器(ADC)、CAN总线控制器;具有业内最佳的EMC性能等。整个系统包括基本的电源电路、复位电路、晶振电路,具有模拟量采集电路,定时捕获电路,车门执行器电路和声光报警电路等。其中模拟量采集电路时采集传感器的模拟信号,定时捕获电路采集车速,车门执行器电路驱动车门打开执行器。
3.2 软件设计
为了便于软件的编写、测试、修改和维护,在软件设计中采用了模块化、结构化和参数化的设计方法,并用C语言来实现。车门控制系统的主要包括以下模块:单片机外围初始化、环境信息检测、环境信息融合算法实现、车速检测、声光报警和执行器驱动等。车门控制流程如图2所示。
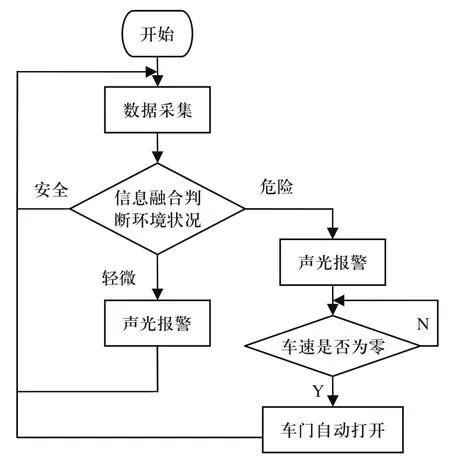
图2 车门控制流程
4 结束语
文中以某客车车门控制设计为例说明了整个系统设计过程,经过实车验证,其效果令人满意。
此信息融合的原理还可以应用到其他需要考虑安全环境的系统。
[1] 付华, 高婷, 刘洋. 多传感器信息融合在煤矿安全中的应用[J]. 传感器与微系统, 2008, 27(5): 115-116.
[2] 朱大奇, 于盛林. 应用模糊数据融合实现电与电路的故障诊断[J]. 小型计算机系统, 2002, 23(5): 633-635.
[3] 何友, 王国宏. 多传感器信息融合及应用[M]. 北京: 电子工业出版社, 2000: 48-76.
